开源自驾仪APM:构建无人机控制系统
版权申诉
"APM中文使用手册Word版.pdf"
ArduPilot Mega(APM)自驾仪是一款开源的自动驾驶控制器,广泛适用于固定翼飞机、直升机、多旋翼飞行器以及地面车辆。其开源特性使得用户可以自由地访问和修改源代码,以适应不同的应用需求。APM自驾仪的主要性能特点包括:
1. 多平台支持:APM提供了三种模式,即ArduPlane用于固定翼飞机,ArduCopter适用于直升机和多旋翼,而ArduRover则针对地面车辆。这使得APM能够适应多种类型的无人驾驶系统。
2. 易于使用:APM与多种功能强大的地面控制站兼容,如Mission Planner和HKGCS。用户可以通过简单的图形界面进行参数调整和固件升级,无需专业知识或额外硬件。
3. 任务规划:地面站软件支持创建复杂的三维航点任务,用户只需在地图上点击即可设定飞行路径。
4. MAVLink协议:基于MAVLink协议,APM支持双向遥测,确保实时数据传输和命令执行,增强了系统的稳定性。
5. 多样化地面站选择:用户可以选择不同的免费地面站软件,实现任务规划、参数调整、视频显示、语音合成等功能。
6. 自主飞行功能:APM能实现自动起飞、降落、航线飞行和自动返航等高级自动驾驶功能,极大地提高了飞行安全性和效率。
7. 硬件配置:自驾仪的核心处理器是ATMEL的8bit ATMEGA2560,配备六轴传感器(MPU6000),高精度气压传感器(MS-5611)用于高度测量,以及三轴磁力计(HMC5883)。此外,还有多路PWM输入和输出,兼容不同类型的飞行器组件。
8. 扩展性:APM支持外部GPS模块(如MTK3329和ublox系列),可以屏蔽板载PPM解码功能,使用外部PPM解码板或接收机。同时,用户还可以选择安装OSD模块,将飞行状态信息实时叠加在视频流上。
APM自驾仪以其开源、多平台兼容和丰富的功能,为无人机爱好者和开发者提供了一个强大且灵活的平台,方便他们构建和定制自己的无人机系统。无论是业余爱好者还是专业开发团队,都能从中找到合适的解决方案。
八、地面站调试软件 Mission Planner 安装
首先,Mission Planner 的安装运行需要微软的 Net Framework 4.0 组件,所以在安装 Mission Planner 之
前 请 先 下 载 Net Flamework 4.0 并 安 装 , 官 方 下 载 地 址 为
http://www.microsoft.com/zh-cn/download/confirmation.aspx?id=17718
安装完 Net Framework 后开始下载 Mission Planner 安装程序包,最新版本的 Mission Planner 可以点击
此处 下载:http://firmware.diydrones.com/Tools/MissionPlanner/,下载页面中每个版本都提供了 MSI 版
和 ZIP 版可 供选择。MSI 为应用程序安装包版,安装过程中会同时安装 APM 的 USB 驱动,安装后插
上 APM 的 USB 线即可使用。ZIP 版为绿色免安装版,解压缩即可使用,但是连接 APM 后需要你手动
安装 APM 的 USB 驱动程序,驱动程序在解压后的 Driver 文件夹中。具体使用哪个版本请自行决定,
如果是第一次安装使用,建议你下载 MSI 版。
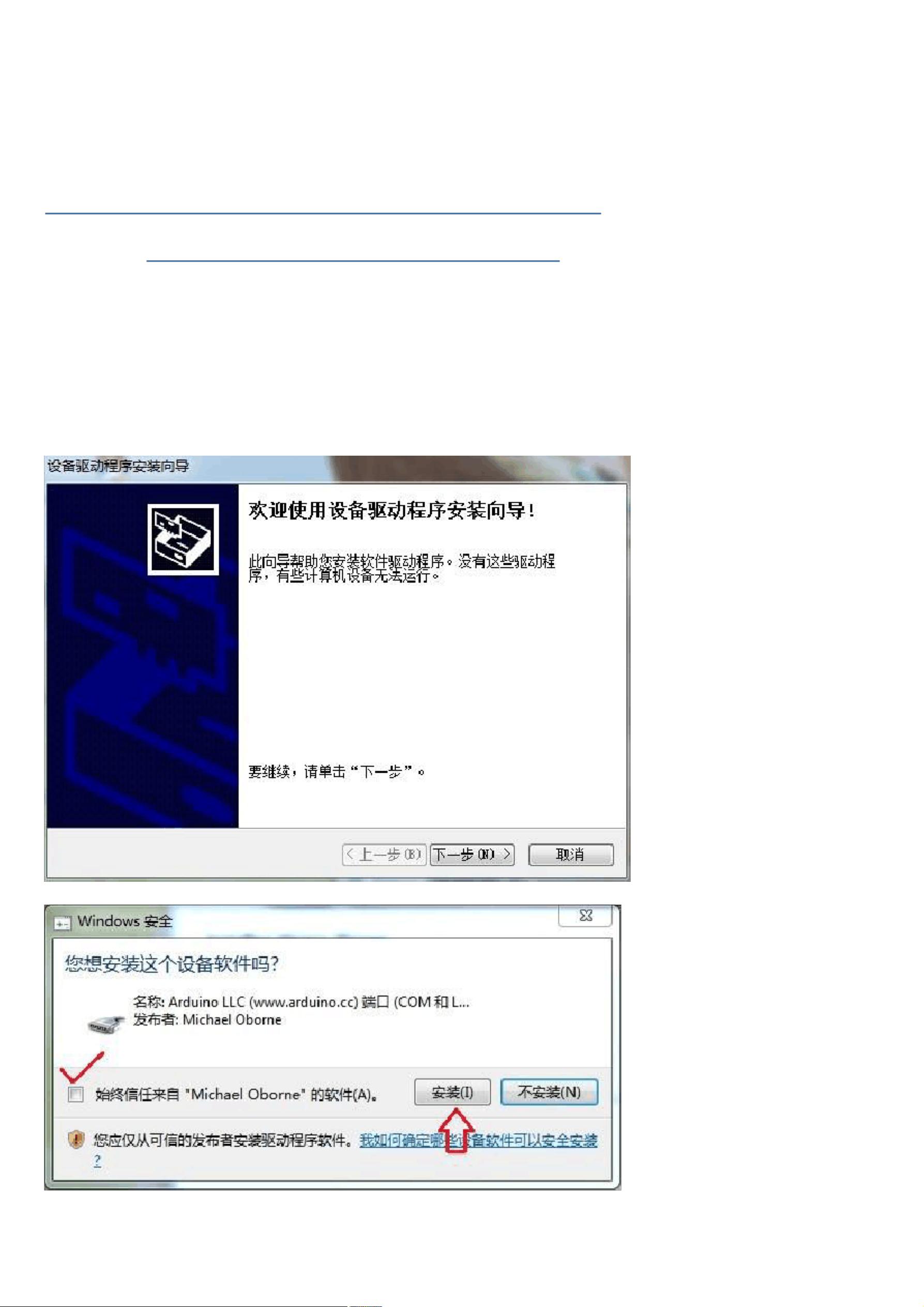
以安装 MSI 版为例(注意:安装前请不要连接 APM 的 USB 线),双击下载后的 MSI 文件,然后一
步一步 Next 即可,只是安装过程中弹出设备驱动程序安装向导时,请点击下一步继续,否则会跳过驱
动程序的安装
接着勾选始终信任……然后点击安装,安装程序会自动安装相关的驱动程序
剩余30页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
621 浏览量
2021-08-04 上传
2021-03-28 上传
2022-11-05 上传
2021-12-01 上传
2021-09-13 上传

คิดถึง643
- 粉丝: 4042
- 资源: 1万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- C语言数组操作:高度检查器编程实践
- 基于Swift开发的嘉定单车LBS iOS应用项目解析
- 钗头凤声乐表演的二度创作分析报告
- 分布式数据库特训营全套教程资料
- JavaScript开发者Robert Bindar的博客平台
- MATLAB投影寻踪代码教程及文件解压缩指南
- HTML5拖放实现的RPSLS游戏教程
- HT://Dig引擎接口,Ampoliros开源模块应用
- 全面探测服务器性能与PHP环境的iprober PHP探针v0.024
- 新版提醒应用v2:基于MongoDB的数据存储
- 《我的世界》东方大陆1.12.2材质包深度体验
- Hypercore Promisifier: JavaScript中的回调转换为Promise包装器
- 探索开源项目Artifice:Slyme脚本与技巧游戏
- Matlab机器人学习代码解析与笔记分享
- 查尔默斯大学计算物理作业HP2解析
- GitHub问题管理新工具:GIRA-crx插件介绍
