高阶非线性系统:新型固定时间收敛抗扰控制的进展与应用
版权申诉
2 浏览量
更新于2024-06-29
收藏 772KB DOCX 举报
高阶非线性系统新型固定时间收敛抗扰控制研究着重于解决传统控制方法在处理这类复杂系统时存在的局限性。传统的控制策略,如线性化后采用的线性最优控制、状态反馈和PID控制,虽然在一定程度上有效,但面对快速变化的外部扰动和不确定性,它们可能产生较大的超调、较长的调节时间和无法满足高精度控制需求的稳态误差。近二十年来,非线性控制理论取得了显著进展,其中backstepping控制因其特有的递归结构而成为设计高阶非线性系统控制器的重要工具。
backstepping方法通过逐级分解系统,从低阶子系统开始设计虚拟控制器,然后逐步向更高阶推进,以简化设计过程并提高控制效率。例如,在柔性关节机器人控制中,backstepping与观测器结合,能有效地估计和补偿未知项,实现高精度的控制(参考文献[11])。文献[12]则进一步通过获取存储函数和自适应控制,实现实时参数估计,增强系统的收敛性和稳定性。
然而,backstepping控制的指数收敛特性在接近原点时收敛速度急剧下降,这在稳定性和鲁棒性方面存在缺陷,导致稳态误差增加。为克服这一问题,李氏有限时间收敛控制应运而生。这种控制理论能在有限时间内确保跟踪误差收敛到极小的邻域,保证闭环系统信号的有界性,从而提高系统的稳定性和鲁棒性(如[15]中所述的自适应李氏控制器)。
文献[16]将滑模控制与李氏有限时间收敛控制理论结合,成功应用于运载火箭姿态的有限时间控制,展现了该方法在实际系统中的应用潜力。此外,通过神经网络和最小参数学习,文献[17]可能探讨了如何优化控制器的设计,使其更适应非线性系统的复杂特性。
总结来说,高阶非线性系统新型固定时间收敛抗扰控制的研究旨在开发更为有效的控制策略,通过改进backstepping方法,结合其他先进理论如有限时间收敛控制,以提升系统的响应速度、稳定性和鲁棒性,尤其适用于存在不确定性和快速扰动的复杂系统环境。
(10)
证明:
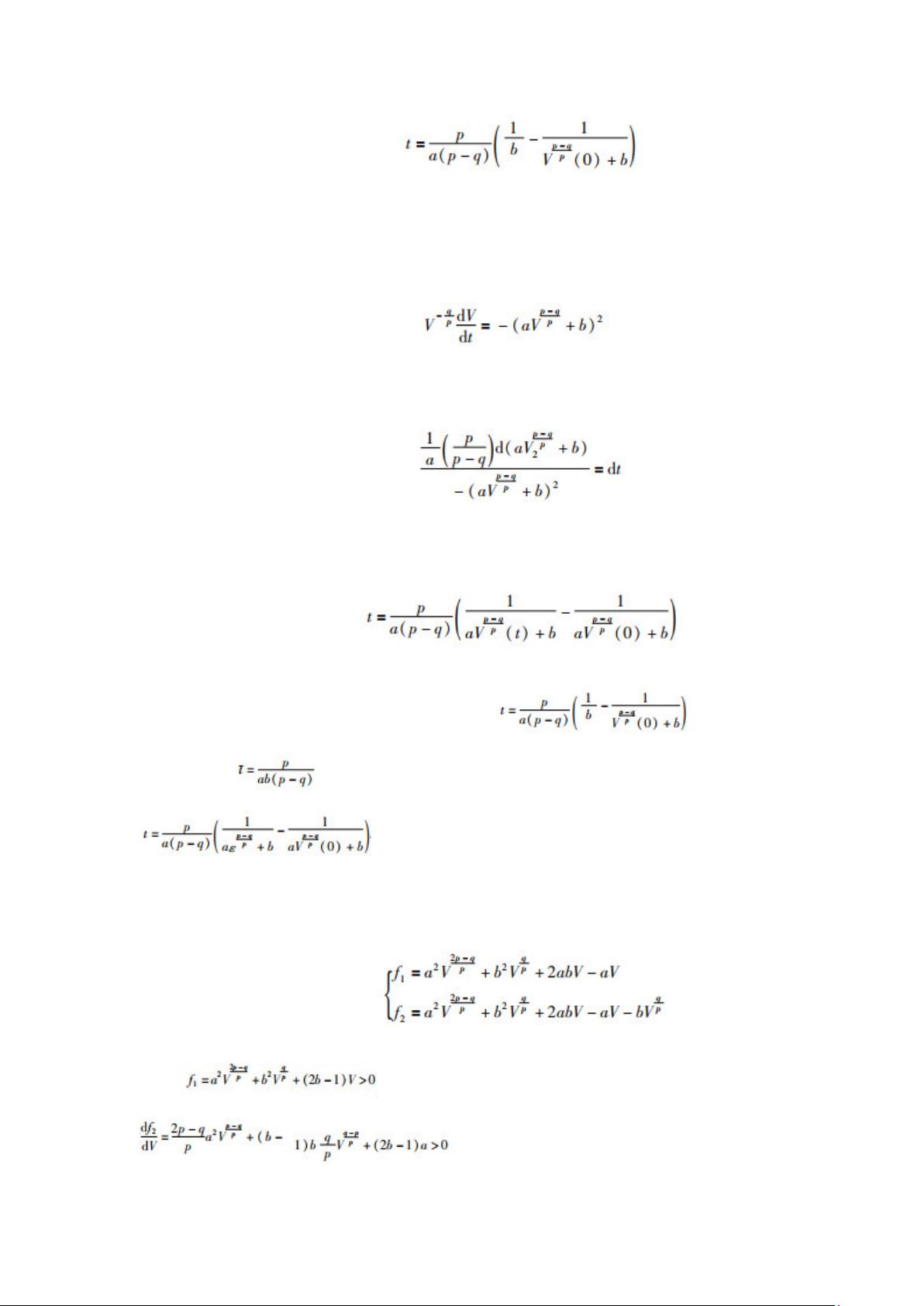
1) 式(9)可化为
(11)
将式(11)进一步化为
(12)
对式(12)两边同时积分得
(13)
由式(13)可知当 V(t)=0 时,系统收敛到原点的时间为 ,其存在一个
固定时间上界为 ,当 V(t)收敛到任意小的 ε 时,收敛时间
.
2) 设收敛速度比较函数分别为
对于任意 V∈(0,+∞)成立.而 f
2
(0)=0,其对 V 的导数
,所以 f
2
>0 对任意 V∈(0,+∞)成立.
剩余17页未读,继续阅读
2023-02-23 上传
2022-11-03 上传
2023-02-23 上传
2022-05-26 上传
2023-02-23 上传
2022-11-03 上传
2023-02-23 上传

罗伯特之技术屋
- 粉丝: 4411
- 资源: 1万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- Postman安装与功能详解:适用于API测试与HTTP请求
- Dart打造简易Web服务器教程:simple-server-dart
- FFmpeg 4.4 快速搭建与环境变量配置教程
- 牛顿井在围棋中的应用:利用牛顿多项式求根技术
- SpringBoot结合MySQL实现MQTT消息持久化教程
- C语言实现水仙花数输出方法详解
- Avatar_Utils库1.0.10版本发布,Python开发者必备工具
- Python爬虫实现漫画榜单数据处理与可视化分析
- 解压缩教材程序文件的正确方法
- 快速搭建Spring Boot Web项目实战指南
- Avatar Utils 1.8.1 工具包的安装与使用指南
- GatewayWorker扩展包压缩文件的下载与使用指南
- 实现饮食目标的开源Visual Basic编码程序
- 打造个性化O'RLY动物封面生成器
- Avatar_Utils库打包文件安装与使用指南
- Python端口扫描工具的设计与实现要点解析
