基于查找表的高速DC-DC转换器数字PID控制器设计
需积分: 9 68 浏览量
更新于2024-09-12
收藏 285KB PDF 举报
本文主要探讨了一种基于查找表(Look-Up Tables, LUT)的数字PID控制器在高频直流-直流转换器控制中的设计。作者Aleksandar Prodić和Dragan Maksimović来自科罗拉多大学波尔得分校电气与计算机工程系的Colorado Power Electronics Center,他们旨在通过LUT替代乘法运算来实现一个小型、低功耗且适用于高频率开关模式的控制器设计。
在传统的模拟控制器中,PID(比例-积分-微分)控制算法通常依赖于复杂的运算,如乘法和除法,这在高速开关频率下可能会成为性能瓶颈。然而,通过使用LUT,设计者可以预先计算出PID调节过程中的各种输入输出关系,从而简化计算步骤。这种方法的优势在于减小了硬件需求,降低了芯片的复杂性和功耗,使得控制器能够在1MHz这样的高频下稳定工作。
设计的关键要素包括LUT的分辨率和大小。选择适当的分辨率确保了控制精度,而LUT的容量则取决于所需的调节策略复杂度。设计者需要权衡这些因素,以达到最佳性能与功耗平衡。文中给出了设计指南,提供了关于如何确定合适LUT参数的实用建议。
文章以一个实际设计为例,介绍了一款用于控制1MHz、2.7V、3W的 buck 转换器的数字控制器集成电路。该设计展示了数字PID控制器在高频应用中的实际效果,包括控制器架构、实现细节以及实验结果。通过这个案例,读者可以了解到将LUT应用于PID控制在实际设计中的具体步骤和可能遇到的问题。
这篇文章对于那些寻求在高频DC-DC转换器中提高控制效率、降低功耗的工程师具有重要的参考价值,展示了数字PID控制器结合LUT技术在现代电力电子系统中的创新应用。
Design of a Digital PID Regulator Based on Look-Up Tables
for Control of High-Frequency DC-DC Converters
Aleksandar Prodić and Dragan Maksimović
Colorado Power Electronics Center
Department of Electrical and Computer Engineering
University of Colorado at Boulder
Boulder, CO 80309-0425, USA
Aleksandar.Prodic@colorado.edu
Abstract – This paper describes design of a digital PID
regulator based on look-up tables for high frequency dc-dc
switching converters. The use of the look-up tables instead of
multipliers enables a small, low-power implementation and
operation at high switching frequencies. Design guidelines are
given for the resolution and size of entries in the look-up
tables. A design example and experimental results are
presented for a digital controller IC used to control a 1 MHz,
2.7 V, 3 W buck converter.
I. INTRODUCTION
Digital controllers can offer a number of advantages over
analog controllers, including flexibility, lower sensitivity,
and programmability without external components [1-6].
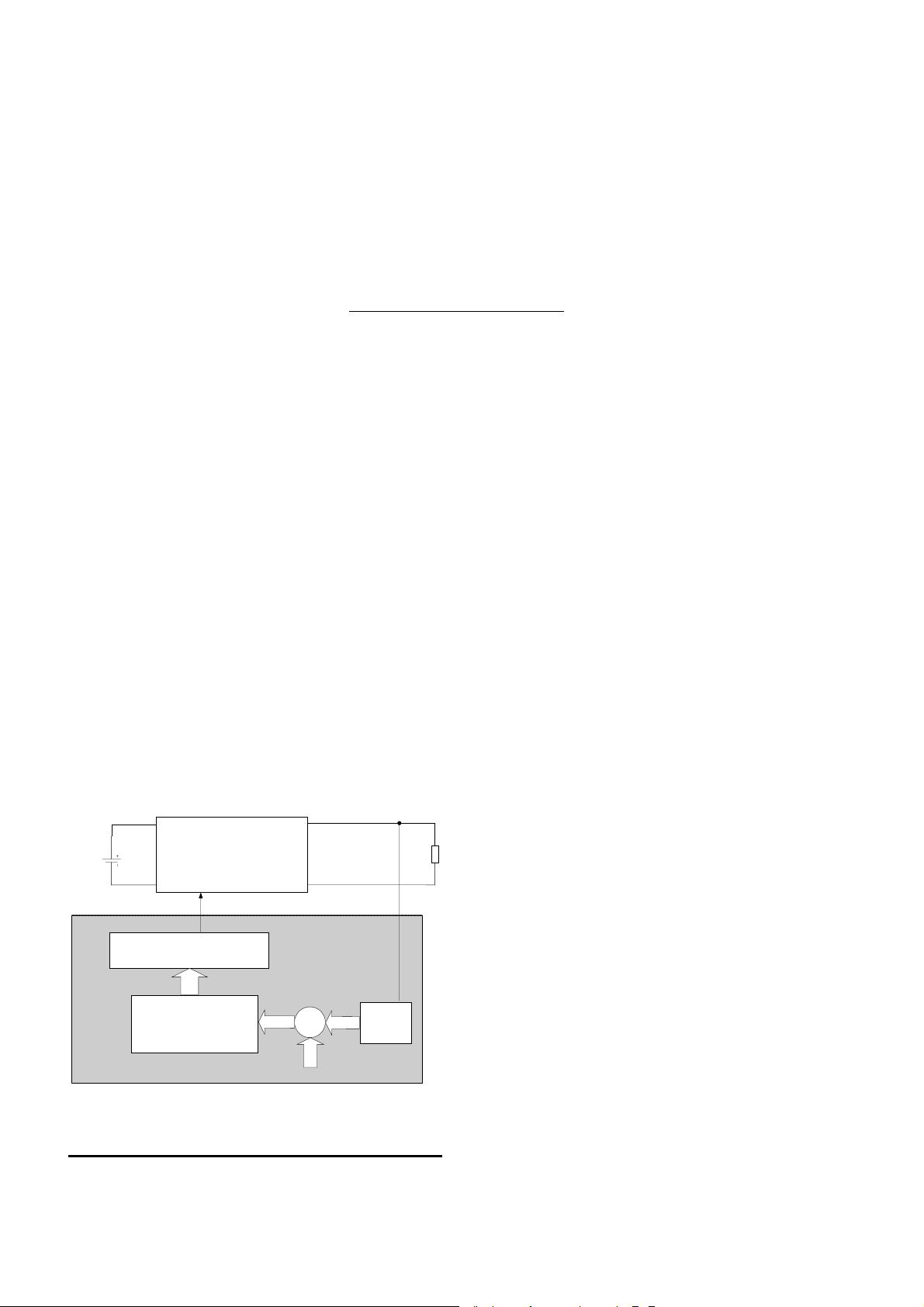
Figure 1 shows a digitally controlled switching converter.
It consists of an analog-to-digital converter, a processing
unit (regulator) that implements a control law, and a digital
pulse width modulator (DPWM). In order to achieve
dynamic characteristics comparable with analog PWM
controllers, fast implementation of a discrete-time control
law is required. For cost-driven low-power, high-frequency
applications, simplicity, small size and low power
consumption are important. In order to implement a digital
controller for these applications, hardware optimization is
needed. The hardware requirements that DPWM and
Load
V
in
A/D
Regulator
(Processing unit)
Digital Pulse Width
Modulator (DPWM)
Switching Converter
V
out
(t)
+
-
d[n]
+
V
ref
[n]
-
V
out
[n]
e[n]
d(t)
Figure 1. Block diagram of a digitally controlled dc-dc switching
converter.
This work was supported by National Semiconductor Corp. through the
Colorado Power Electronics Center.
analog-to-digital converter have to satisfy are defined in [7,
8]. In this paper, we focus on minimum hardware
requirements for the computational unit that implements a
discrete-time PID control law.
In Section II, the regulator structure is given and problems
of conventional implementation based on multipliers are
addressed. Design guidelines for selection of the resolution
of the computational unit are given in Section III. Section
IV shows experimental results obtained with an on-chip
implemented, look-up table based regulator for a buck
converter operating at 1 MHz switching frequency.
II. REGULATOR STRUCTURE
In the controller of Figure 1, the sampled output voltage is
compared to a reference and their difference forms an error
signal. A regulator that implements a control law processes
the error signal. The control law can be represented in the
following form:
...]2[]1[
][..]2[]1[][
21
021
+−+−+
+++−+−=
nene
nendndnd
ββ
βαα
(1)
where d[n] and e[n] are the current values of the duty ratio
and the error signal, while d[n-i] and e[n-i] are the values
of the duty ratio and the error signal i cycles before the
current cycle. The coefficients α
i
and β
i
determine the
regulator characteristics.
It can be seen that implementation of the discrete-time
control law (1) requires several multiplications and
additions. Digital multipliers are relatively large or slow
components.
For a properly operating feedback system, the difference
between the measured output voltage and the reference is
relatively small. This opens the possibility of
implementing the regulator using relatively small look-up
tables instead of multipliers [3].
下载后可阅读完整内容,剩余4页未读,立即下载
177 浏览量
2022-02-05 上传
2021-02-08 上传
2021-02-08 上传
2022-07-15 上传
2012-07-10 上传
129 浏览量
2021-06-01 上传
104 浏览量

Codings
- 粉丝: 35
- 资源: 182
 我的内容管理
展开
我的内容管理
展开







最新资源
- hareandhounds:一个基于网络的游戏,称为“野兔和猎犬”
- QTranslate v6.8.0 LITE快速翻译工具
- 茶叶商城(含后端)_history3v6_商城小程序_茶叶商城
- marmot:Marmot工作流程执行引擎
- 国际象棋系统
- 易语言超级列表框取单行列
- civo_cloud_network_test
- api:石灰事件的GraphQL API
- lorentz-force:一种在三维场中模拟磁力对粒子影响的工具
- 修正的摩尔库伦模型_abaqus库伦_abaqus隧道_摩尔库伦模型_abaqus修正摩尔_修正的摩尔库伦三维模型
- 易语言超级列表框动态插入
- appcenter:Liri OS的App Center
- food_app
- pipeline-library
- ticTacToe_js
- java各种javaUntils集成工具类源代码
