解析机器人避障问题:最短路径与最短时间研究【建模集训】
版权申诉
199 浏览量
更新于2024-02-22
收藏 1.19MB DOC 举报
本文对2012年全国大学生数学建模竞赛D题机器人避障问题进行了全面的分析和建模研究。首先针对机器人避障问题,提出了最短路径和最短时间两个不同的问题,分别进行了理论分析和建模。在最短路径问题中,通过对Dijkstra算法的应用和几何模型的建立,成功地设计了机器人避障最短路径的模型,并对其进行了证明和分析。同时,针对最短时间路径问题,本文建立了非线性规划模型,有效地解决了转弯半径、圆弧圆心位置和行走时间等问题。通过对12个不同形状的静态障碍物的数学描述和模型建立,为机器人在800×800平面正方形区域内寻找安全高效的行走路径提供了重要的理论支持。
随着科学技术的不断进步,机器人在各个领域的应用越来越广泛,因此如何使机器人在工作区域内绕过各种障碍物,到达指定的目的地成为了一个重要且具有挑战性的问题。本文以2012年全国大学生数学建模竞赛D题“机器人避障问题”为例,对此问题进行了深入的研究和分析。
在研究中,本文首先提出了机器人避障问题中的两个不同的子问题,即最短路径问题和最短时间问题。针对最短路径问题,本文运用了Dijkstra算法,并建立了机器人避障最短路径的几何模型。通过理论分析和证明,成功地设计出了有效的路径规划模型,并对其进行了具体的优化和改进。同时,在最短时间路径问题中,本文建立了非线性规划模型,有效地解决了转弯半径、圆弧圆心位置和行走时间等关键问题。
另外,本文还对12个不同形状的静态障碍物进行了数学描述,并建立了相应的模型,为机器人在800×800平面正方形区域内寻找安全高效的行走路径提供了理论支持。通过对障碍物的特性进行具体的分析和建模,进一步完善了机器人的避障路径规划模型。
综上所述,本文通过对2012年全国大学生数学建模竞赛D题机器人避障问题的深入研究和分析,成功地建立了机器人避障最短路径和最短时间的数学模型,并对其进行了详细的理论分析和优化。通过本文的研究成果,不仅在理论上为机器人避障问题的解决提供了重要的参考和指导,也为机器人在实际工作中的路径规划和避障提供了重要的理论支持。希望本文的研究成果能够为相关领域的研究和实践工作提供有益的参考和借鉴。
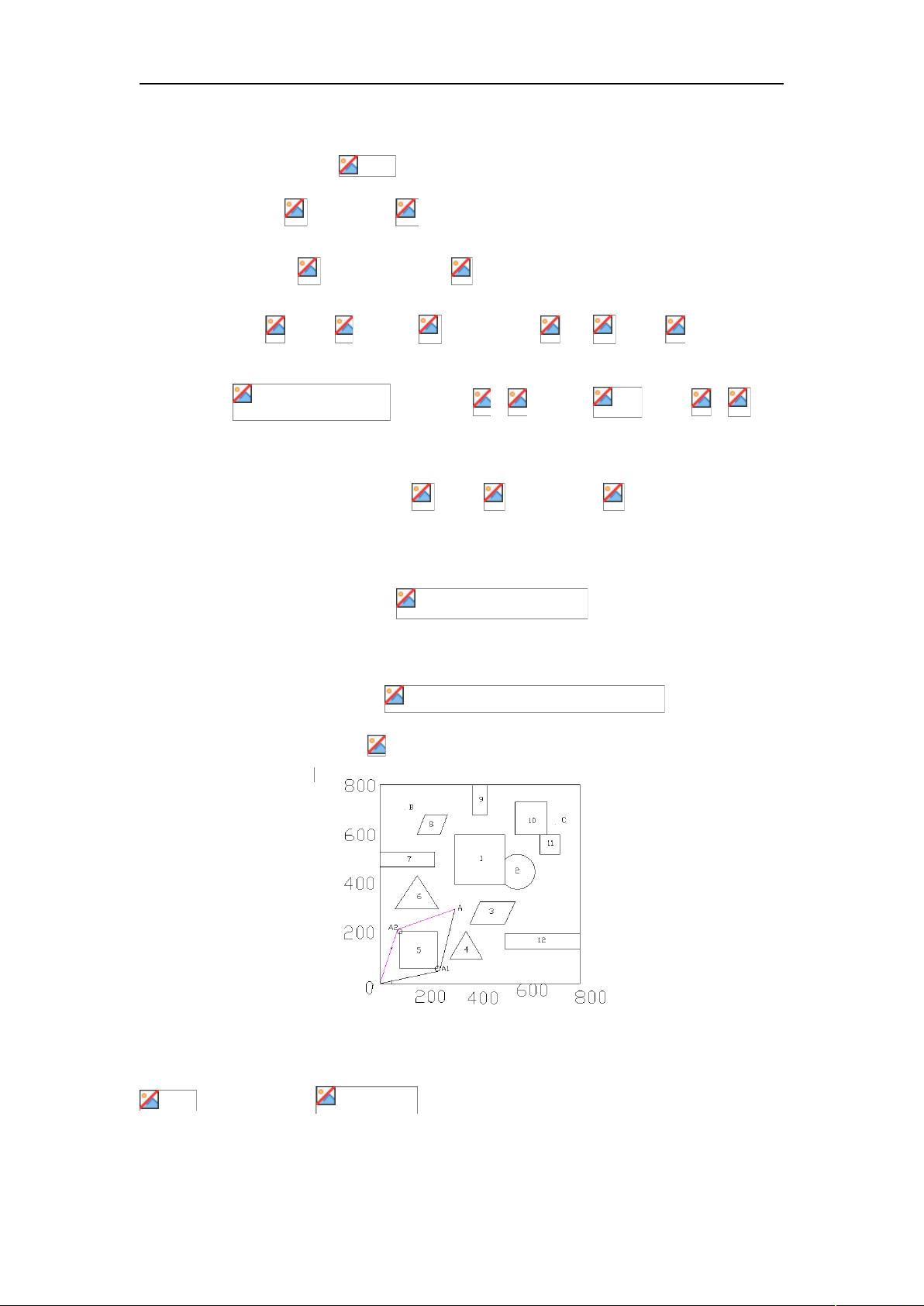
图 6
运用 Dijkstra 算法算出 的最短路径,最短路算法如下:
1、起点 O 记为 ,终点 B 记为 ;
2、从网络的终点 开始,令它的标号 为零,并用方框记录在图 6 中;
3、计算结点 的标号 ,设结点 已标号,结点 指向 ,那么 的标号可按算
式: 求出,其中 是 的标号, 是结点 与 之间
的直线距离;
4、重复上述计算,直到求得起点 的标号 为止,此标号 即为最短路的长度;
5、确定最短路径,从起点开始,顺网络的箭线前进,假设有几条箭线,那么选取箭
线所指标号最小且满足条件 的结点为最短路径所经过的
结点。
在图 6 中,最短路径为: .
应用上述算法可得到从 点出发,分别到达各目标点的最短路径:
图 7
的最短路径为: 〔如图 7〕
6 / 27
剩余26页未读,继续阅读
2021-09-23 上传
2023-07-12 上传
2021-10-08 上传
2023-07-12 上传
2023-07-11 上传
2021-10-10 上传

yunxidzh
- 粉丝: 66
- 资源: 30万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- Windows CE Programming [PDA][C++].pdf
- Wince深入浅出教程.pdf
- PlatformBuilderandEmbeddedVisualC++.pdf
- SQL语法参考手册,简单易用
- profiler使用大全
- ejb3.0实例教程.pdf
- 数据挖掘概念与技术Ed2
- Arm system developer's giude.pdf
- SVM Nice paper
- Spring开发指南(PDF)
- SQL Server 2005安装使用教程
- 需求分析的模板要的下
- VIM用户使用手册中文版
- Fedora10正式版完全安装教程.pdf
- 高速PCB设计指南高速PCB设计指南高速PCB设计指南
- zend framework 分页类
