Pioneer3移动机器人操作指南:安全与功能详解
Pioneer3机器人操作手册是由利曼科技有限公司发布的,专为Pioneer3系列移动机器人设计,于2007年9月更新至第五版。该手册强调了版权保护,所有Pioneer3的软件和硬件都受MobileRobots, LLC的严格控制,未经许可不得复制或用于商业用途。手册中包含了重要的安全提示,如在使用前必须仔细阅读安装和操作指南,避免在危险环境中操作,以及防止错误操作可能导致的设备损坏。
Pioneer3机器人是一款高度专业化的平台,其核心组成部分包括基础结构,可选的附件提供了灵活性。用户需要提供特定的组件以满足系统的最低要求,并可能需要访问额外的资源,如官方网站、支持论坛和新闻组以获取更新和支持。
章节一概述了机器人的包装细节,介绍了主要部件以及可选配件,以及用户需要准备的必要硬件。网站支持和社区资源,如新闻组,为用户提供了一个交流和学习的平台。技术支持部分则确保用户遇到问题时能获得及时帮助。
在第二章中,手册深入解析了Pioneer3系列的核心特性。它作为参考平台,允许开发者进行定制和扩展。核心控制器和操作系统软件是其功能实现的基础,包括端口和通信能力,如客户端程序,ARIA(高级实时交互应用程序接口),以及各种操作模式,如地图创建、导航、定位和多种驾驶模式,如操纵杆驱动、独立模式等。
Pioneer11和Pioneer2与Pioneer3的关系也被提及,可能是前代产品的演变,或者是同一系列的不同型号,这些信息有助于理解Pioneer3在产品线中的位置及其历史发展。
整个手册的编写旨在确保用户能够正确、安全地操作Pioneer3机器人,通过遵循官方指导,用户可以充分发挥机器人的性能并最大化其价值。因此,阅读并遵守手册中的规定至关重要,任何违背操作指南的行为都可能导致机器故障或安全风险。
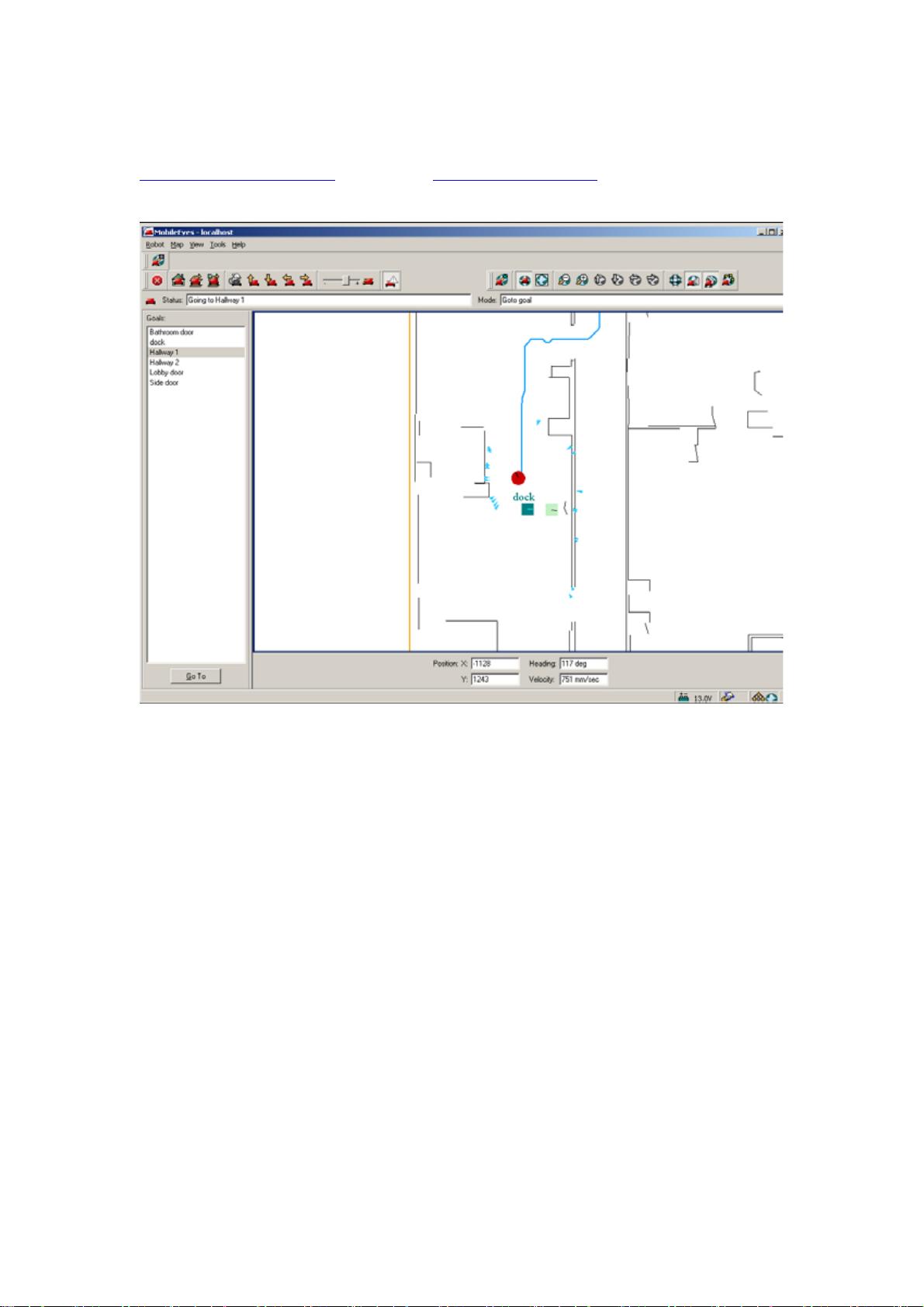
化客户端,MobileEyes™等软件。Mapper3结合ARNL是激光定位和导航的软件工具。得到
有关ARNL、SonARNL、以及其他许多商业软件的详细信息请访问网站:
http://www.mobilerobots.com以及电子邮件sales@mobilerobots.com
图5. 使用SonARNL或者ARNL和MobileEyes通过网络控制机器人进行声纳导航
操作模式
Pioneer3机器人共有4种操作模式
√ 服务器模式
√ 操纵杆驱动模式
√ 维护模式
√ 独立模式
服务器模式
新的基于 SH2 的微控制器带有 128K 可编程 FLASH 以及 32K 动态 RAM。我们不建议
您从 SH2 的编程学起,事实上,机器人已经装有最新版本的 ARCOS 服务器系统。
9




剩余117页未读,继续阅读
713 浏览量
323 浏览量
120 浏览量
2021-09-27 上传
713 浏览量
259 浏览量
825 浏览量
117 浏览量
941 浏览量

aaaachen
- 粉丝: 6
- 资源: 7
 我的内容管理
展开
我的内容管理
展开







最新资源
- 通用3C电商网站左侧弹出菜单导航
- 的github
- 智睿企业视频版网站系统 v4.6.0
- 根据vo生成yapi文档:YapiFileGenerattor.zip
- install.zip
- CodeSoft 条形码标签打印开发指南
- GPT-too-AMR2text:复制“ GPT太”的代码
- counterspell:反咒诅咒的 Chrome 扩展
- CodingTestPractice
- 点文件
- 企业文化竞争(6个文件)
- pytorch-pruning.zip
- 天猫左侧导航菜单分类列表
- torch_sparse-0.6.1-cp36-cp36m-win_amd64whl.zip
- SiamSE:“比例等方差可改善连体跟踪”的代码
- BakedModpack:冒雨风险的modpack 2
