ATmega32操控的履带式遥控采摘机器人设计与实现
68 浏览量
更新于2024-08-29
2
收藏 1.37MB PDF 举报
"基于ATmega32的遥控采摘机器人设计"
在现代农业中,为了提高工作效率和降低成本,采摘机器人成为了一个重要的研究领域。然而,现有的机器视觉采摘机器人由于技术复杂、成本高昂,尚未得到广泛应用。因此,该设计提出了一种创新方案,即采用人工操控的半自动采摘机器人,以克服这些技术挑战。
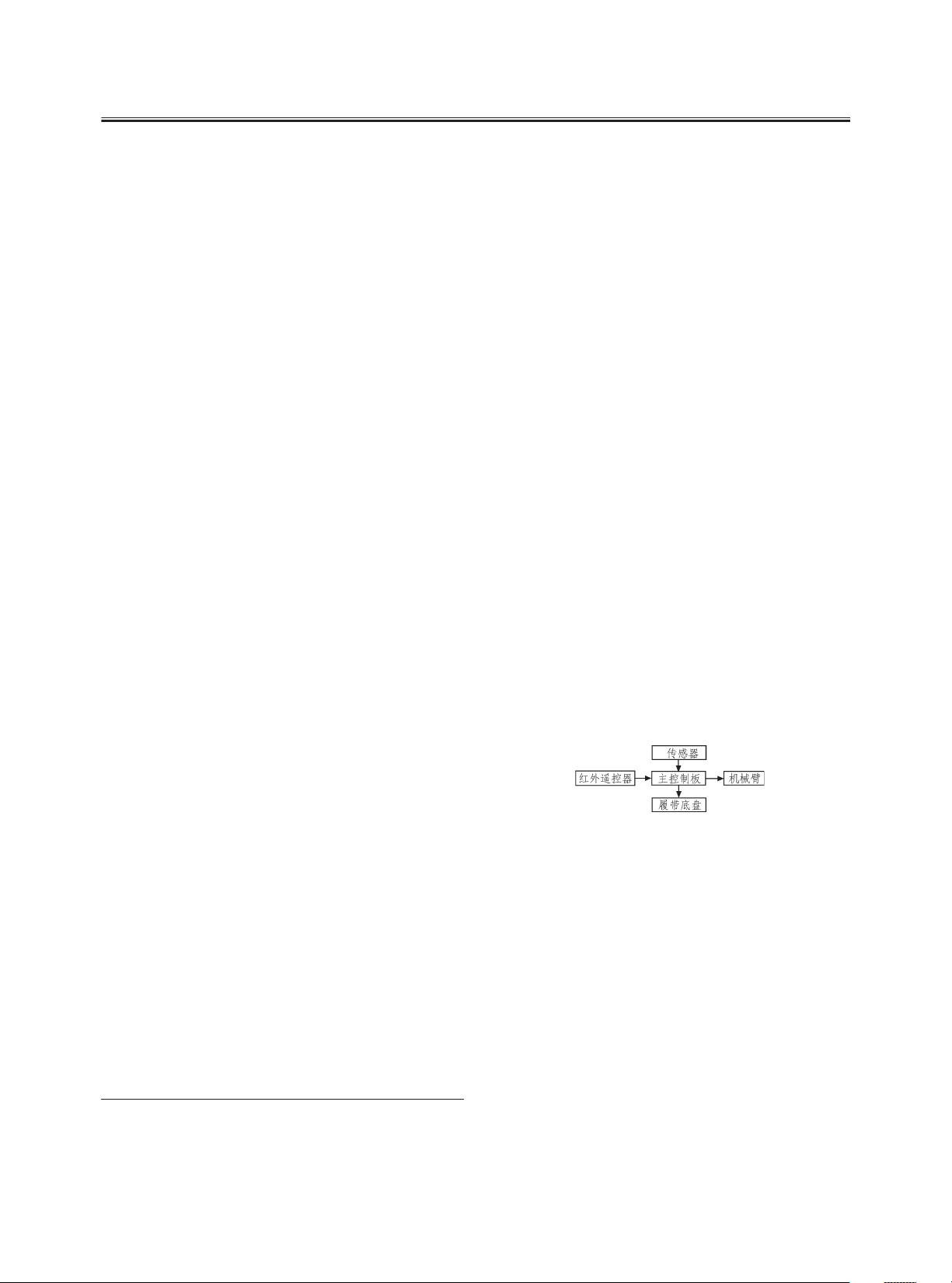
这款采摘机器人采用了履带式底盘作为基础结构,提供了良好的地面适应性和稳定性。机械臂部分具有三自由度,能够灵活地进行采摘动作,模仿人类手臂的运动范围。控制系统的中心是微控制器ATmega32,这是一款功能强大的AVR系列单片机,适用于各种嵌入式系统应用。通过它,可以实现对整个采摘机器人的精确控制。
红外遥控器作为人机交互的工具,采用BL35P12芯片作为核心,使得用户能够远程指挥机器人的动作,如伸缩、旋转等。这样既降低了操作难度,又避免了复杂的编程需求。此外,这种遥控方式还增加了系统的灵活性和实时性。
软件部分,开发者使用AVR Studio4作为开发环境,编写程序来控制机械臂的各个关节,实现全方位的运动控制。模块化设计的机械臂使得维护和升级更为简便,抓取机构快速高效,能适应不同的果实大小和形状。同时,较低的成本使得该方案更具有市场推广潜力。
采摘机器人的设计特点包括其易用性、低成本以及较强的可扩展性。未来,随着技术的进步,可以进一步集成机器视觉和人工智能算法,提升采摘精度和自动化程度,使其更接近全自动的采摘解决方案。
总结起来,该设计通过利用ATmega32单片机和红外遥控技术,构建了一款实用且经济的采摘机器人。这种半自动化的采摘方式为农业自动化提供了一条新的路径,有望在农业生产和研究中发挥重要作用。
!" !"#$%&'( #$%&'()*+,
!"#! $ %
"&'( )* + ,-./01*2! 34 567
!"##$$
#
!" ! 8 9+:;<=>+:?@ABCD EF!EGH IJK L!MN= OP0 QRA STU =>B C !VWX Y
Z[\]$ ^ _ Y ` a b c=> + : P !+ : P d e f ghi j k !l T mn+, o !p qrRQs$ t u - v d
%&'()*#+
iwxRyz{!=>+:PAUs=O
,-#./0+
iz{pqrRRy$wx|uj}
%12 345678"
~
! 9+ ,oU A Ry $ =>+: P= Ob / ^_ ! n !E!} ! $
#$ %! => +:P%lTmn%
%&'()*#+
%pqr R
&' ()*!
&/+"+9:
+,-. /!
%
+01 *
! ;:<"!:+#:
"
+$;+
!
$"=>0.0=>"
)$*+%, -. & /$#-0$ 1+23+,% /-4-0 4 &*$5 -, !"#$%&'(
?@ A8B)")58
"
C%DE -7
#
!"#$%&% "' ()*+,-./ ,-0 1$)*23./4$ 1-&.-) )3.-&
"
5,3.6 7-.8)39. 2:
"
;$,3 !"##>>
"
<+.-4
!
!4*0/&206 %7'7B) *4 4F( G7HI7B) J8K84L
$
L67L*6M*B4*)(L L5HF * L 7''*45J( 4(HFB7N5(
"
48O F7)( GJ7H(
"
OF7HF 7L 6(L7)B(6 K*L(6
8B '*HF7 B( M7L78B
"
4F( F*PQ"*548'*47H G7HI7B) '*HF7B( 7L GJ(L(B4(6
!
*B6 L456R 4F ( 4(HFB7N5(9 S(L7)B(6 * J('8 4("H8B4J8P
F*JM(L47B) J8K84 L5'5P*47M(P R9 &F( J8K84 4*I(L 4F( H*4(JG7PP*J K*B6 *L HF*LL7L
!
OF7HF F*L 4FJ(( 6()J((L 8Q QJ( (68' '(HF*B7H* P
*J'9&F( F*J6O*J( H7JH574 7L 4*I( TU@ %&'()*#+ *L 4F( H8B4J8P H8J(
"
*B6 4F( *J'
$
L '8M('(B4 8Q J8K84 7L H8B4J8PP(6 KR 7BQJ*J(6
J('84("H8B4J8PP7B) H8'( QJ8' ,-#./;+9 &F( LRL4(' L8Q4O*J( 7L 6(M(P8G(6 7B % 12 3456 78"
!
9&F5L J(*P7 V( GJ(H7L( H8B4J8P 48 4F(
*J'
&
L '8M('(B49T865P*J 6(L7)B '*I( 4F( LRL4(' G7HI N5 7HIPR
!
'8J( P8O GJ7H(
!
(*LR J(*P7V(*B6 *B6 (W4(BL7K7P74R9
7$8 9-/5*6 G7HI7B) J8K84
%
4FJ(("QJ(("6()J((
%
%&'()*#+
%
7BQJ*J(6 J('84( H8B4J8P
2345!
+>;;=;+=;"
36 1*!
+>;;;+><X
789:!&'()*)*B3"
&SYZU[;>;>
'%&'()*j"
&SAYAS;>>;
'
;<=>!!""
;X!<
('! ! ¡ ¢£¤ P$ \]¥)¦§Ry$
!"#$%& ' ( ) * + , - . / 0 1 2 3 4 5 6 7
! 8 9 : ; < = > ? "@ A B C D E F 6 7 G H I J " K L
M N 9 G C I O P QR S "T U V W X YZ[ P Q "7 \ 6
7]^"_ `#$ab
\;]
% cdef%&'ghij9k l:
;9m n
"o pmq kl #$"rs' tuv "w x y %&'
zQ{ 9ef"|!"}~ q " i
\+]
%
# A ' % v e f " # A ' t ] ; 6 7 "% & ' $
F% KL 't \ ]^ "Ar VU%& '
lv% cdef\ h i "%&'( _
" " mq¡ ¢ £¤ '¥l "| m q ¦'
9¥l §¨ "5© !"/ª xy 9« ¬"mq j9 ®¯ %
°5±?²09³´"µ ¶· ¸¹©
%&'()*#+
9
º » # $ % &'"m 7\'t u v 9 % ¼ # $"K L ½ ¾
U %¼¿ ÀÁ ÂÃ& ÄÅ!86 7Æ 0>Ç"X Y È
Ft v"¡# $ÉÊ%
:
?@ABCDEFG
%&' Ë Ì ¶ % ¼ U "Í Î Í Ï " k l
U< ÐÑ& ÒÓ "±¯Ô ÕÖ_ TV×% µ/% &
'9ÐÑ&<½¾&9IOØÅÙUÚ" ÙUÚP
QÛØ `U ÜkÝ ¨%¼ ¿<Þ ßàá âã9 % &'"½
¾ %¼¿"7 \ÈF67% %&'âãäGåG
;
Ææ%
%&'9U º fç r U % & ' # A è é u ê e
f"u êëK L &ì Á_í uêî b % U%& ' 9
ïð9 "ì ñ l"òóô ì "Ü kÝ ¨ 9% ¼ ¿ 9ñl "¯ Â
Ã&õô&ö÷Ì% µ/ 9%&'ghâãøù "úmû
ü
"ýþÿ!§×"+%
(
?HIJFK
# $%&' %¼ # ÇGåG
+
Æ æ" Ù$%&' (
)''kÝ ¨9* l+ð<Ük ݨ ß ÂÃ& 9 %¼¿ % %
&'Ùð A,- . Ú/ 0 <tV 102 #% & '%ð "
âã 34 "e5 0ïð?67º8% * l+ðçÞßf àá "
7 # ¶ Ù Í Ï Ú & # $ 9 : # Ç & - d Ð Ñ & & Í ; º 8
LMFGNO
^P(H4J8B7H S(L7)B ^B)7B((J7B)
<
+>
=
18P9+>
<
"
D89"
+>0+
>
+
?
?(K9 +>0+
G
0
%&'âãäG
?7)9 0 ?J*'( 67*)J*' 8Q 4F( G7HI7B) J8K84
!0.0!
下载后可阅读完整内容,剩余3页未读,立即下载
2021-08-11 上传
2021-08-14 上传
2023-04-29 上传
2023-05-17 上传
2023-12-22 上传
2023-05-16 上传
2023-06-01 上传
2023-03-25 上传
2023-12-23 上传

weixin_38733333
- 粉丝: 4
- 资源: 922
 我的内容管理
展开
我的内容管理
展开







最新资源
- 社交媒体营销激励优化策略研究
- 终端信息查看工具:qt框架下的输出强制抓取
- MinGW Win32 C/C++ 开发环境压缩包快速入门指南
- STC8G1K08 PWM模块实现10K频率及易改占空比波形输出
- MSP432电机驱动编码器测路程方法解析
- 实现动静分离案例的css/js/img文件指南
- 爱心代码五种:高效编程的精选技巧
- MATLAB实现广义互相关时延估计GCC的多种加权方法
- Hive CDH Jar包下载:免费获取Hive JDBC驱动
- STC8G单片机实现EEPROM及MODBUS-RTU协议
- Java集合框架面试题精讲
- Unity游戏设计与开发资源全集
- 探索音乐盒.zip背后的神秘世界
- Matlab自相干算法GUI界面设计及仿真
- STM32智能小车PID算法实现资料
- Python爬虫实战:高效爬取百度贴吧信息
