立体视觉:算法介绍与实时匹配方法比较
Stefano Mattoccia 的讲义深入探讨了立体匹配在计算机视觉领域的核心作用,特别是对于双目立体视觉系统的研究。该讲义以“立体视觉:算法与应用”为主题,旨在介绍立体匹配的基本概念、原理和实际应用。
立体匹配是通过分析来自两个或更多摄像头的图像对,推断出物体的深度信息,这是一种重要的三维重建技术。在计算机视觉中,它是一项广泛而深入的研究课题,特别关注于binocular stereo systems(双目视觉系统),因为它们能够提供丰富的深度信息,对于机器人导航、自动驾驶、虚拟现实以及增强现实等领域至关重要。
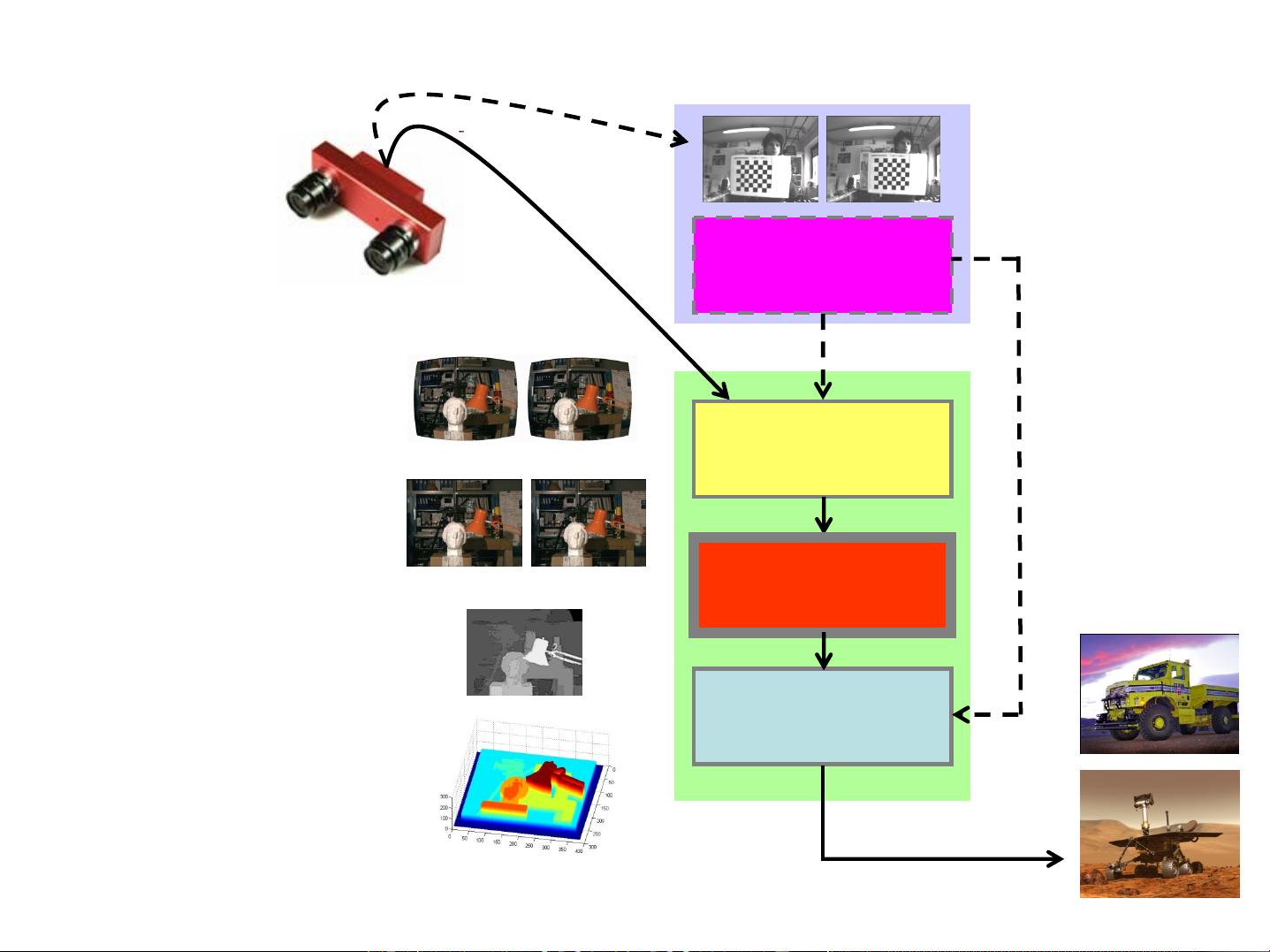
讲义分为几个部分展开。首先,Stefano Mattoccia 引入了立体视觉的概念,阐述其基本原理,即如何通过视差(image correspondence)来估计物体的距离。接着,他概述了立体视觉系统的结构,包括硬件和软件组件,如相机设置、数据采集和处理流程。
重点部分讨论了各种视觉对应(visual correspondence)算法,其中包括但不限于经典的立体匹配算法,如SIFT (Scale-Invariant Feature Transform) 和SURF (Speeded Up Robust Features) 对于特征点匹配的运用,以及Fast Bilateral Stereo算法,这是一种优化的双边滤波法,用于减小噪声影响并提高匹配精度。Stefano提到,他在2010年4月20日更新了讲义,加入了对这些算法的详细描述和实验结果,特别是针对[67]、[68]和[69]这三篇论文的深入探讨。
硬件实现也是讲义的重要内容,因为它关乎算法能否在实时或硬件环境中高效运行。Stefano强调了如何通过优化计算方法和硬件设计,使得这些算法能够在性能和效率之间找到平衡,以便在实际应用中得到广泛应用。
最后,讲义列举了一些立体视觉的应用实例,如NASA的项目,展示这项技术在航天领域的关键作用,如空间探测器上的导航、地形测绘和目标识别等。这些应用案例展示了立体匹配在不同领域的广阔前景和实际价值。
Stefano Mattoccia 的讲义提供了立体匹配技术的全面理解,不仅涵盖了理论基础,还着重介绍了当前主流的匹配算法和它们在实时硬件环境下的可能性,为从事计算机视觉和机器人技术研究的学生和专业人士提供了宝贵的参考资源。
Stefano Mattoccia
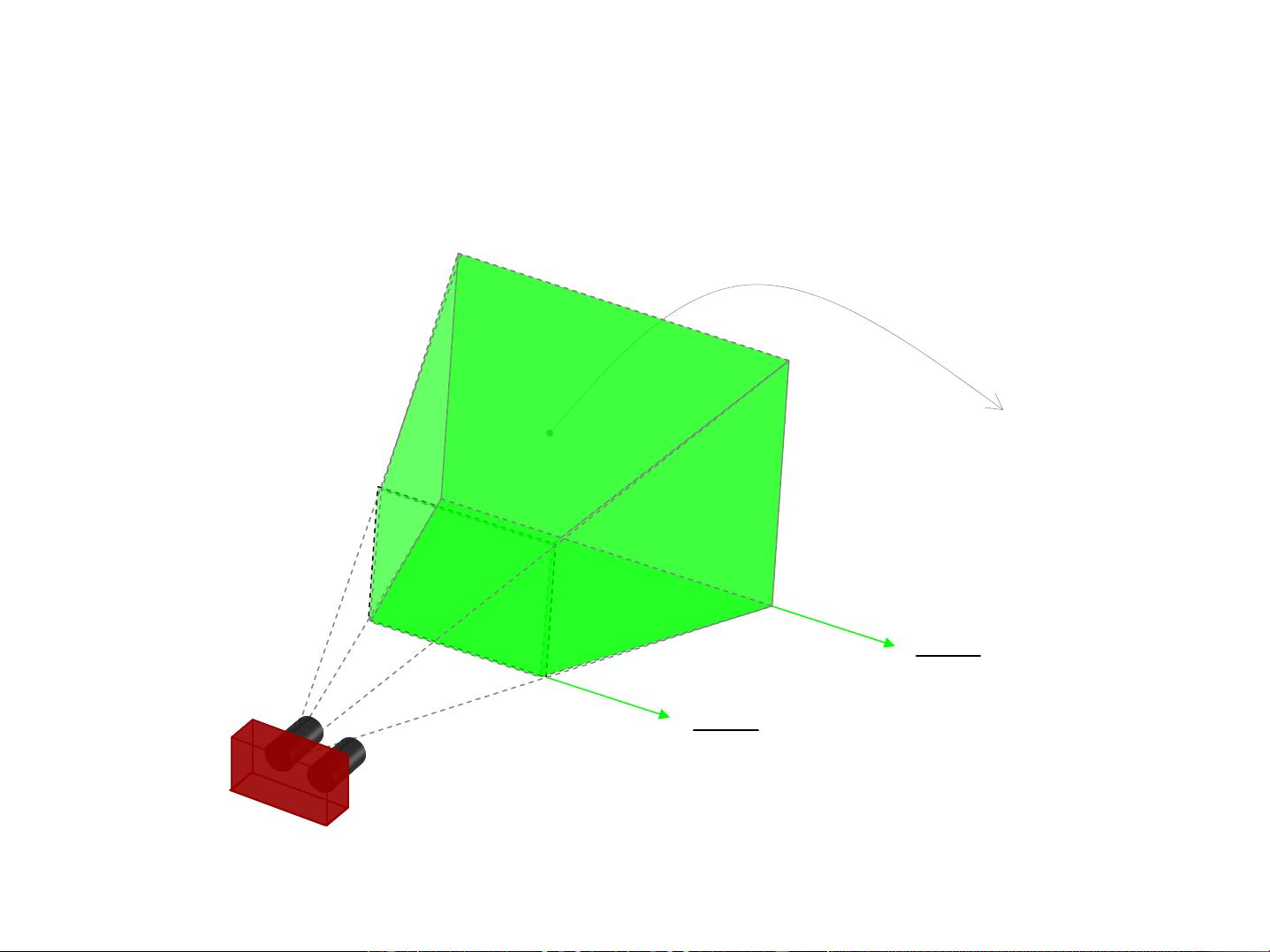
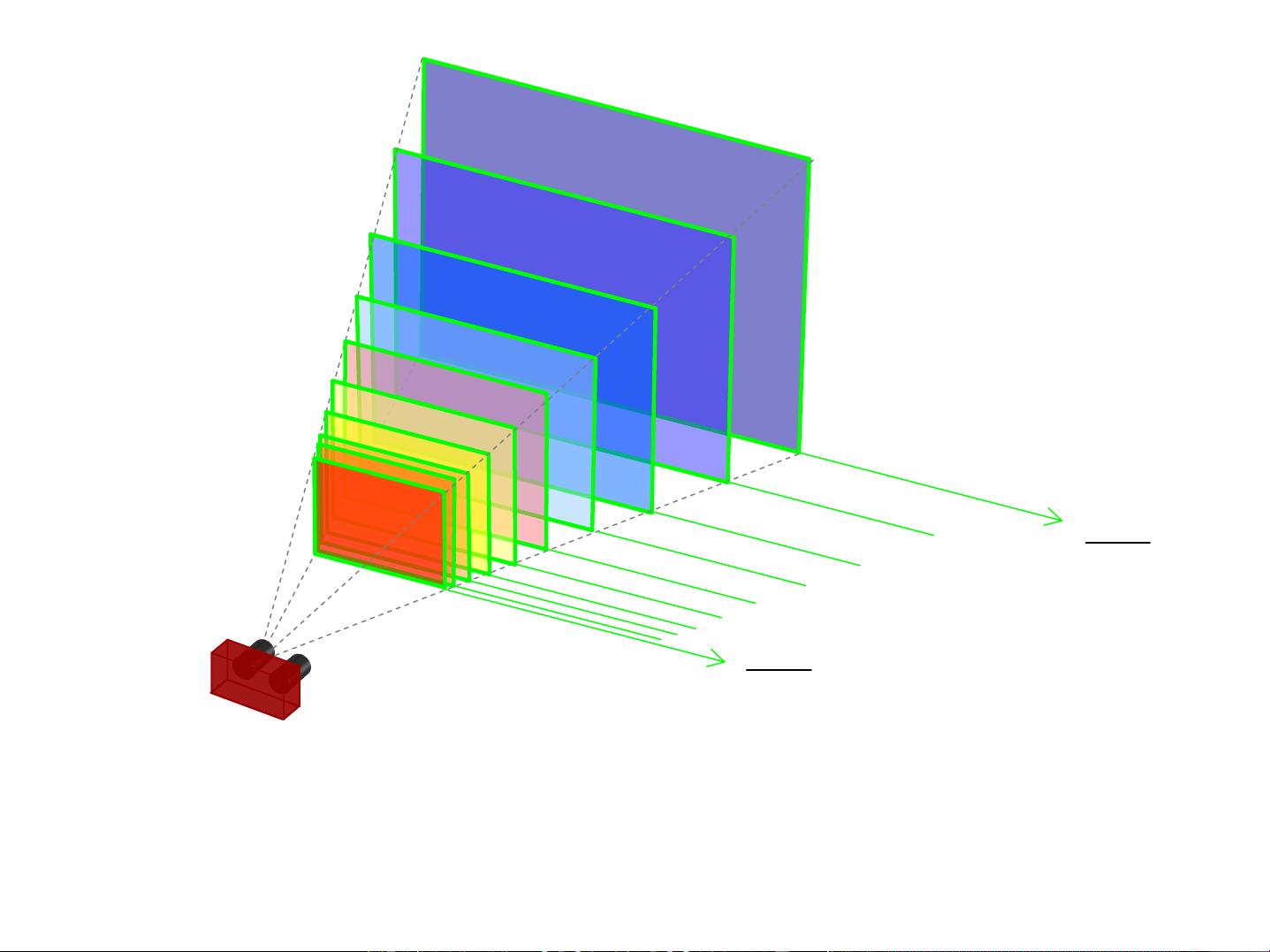
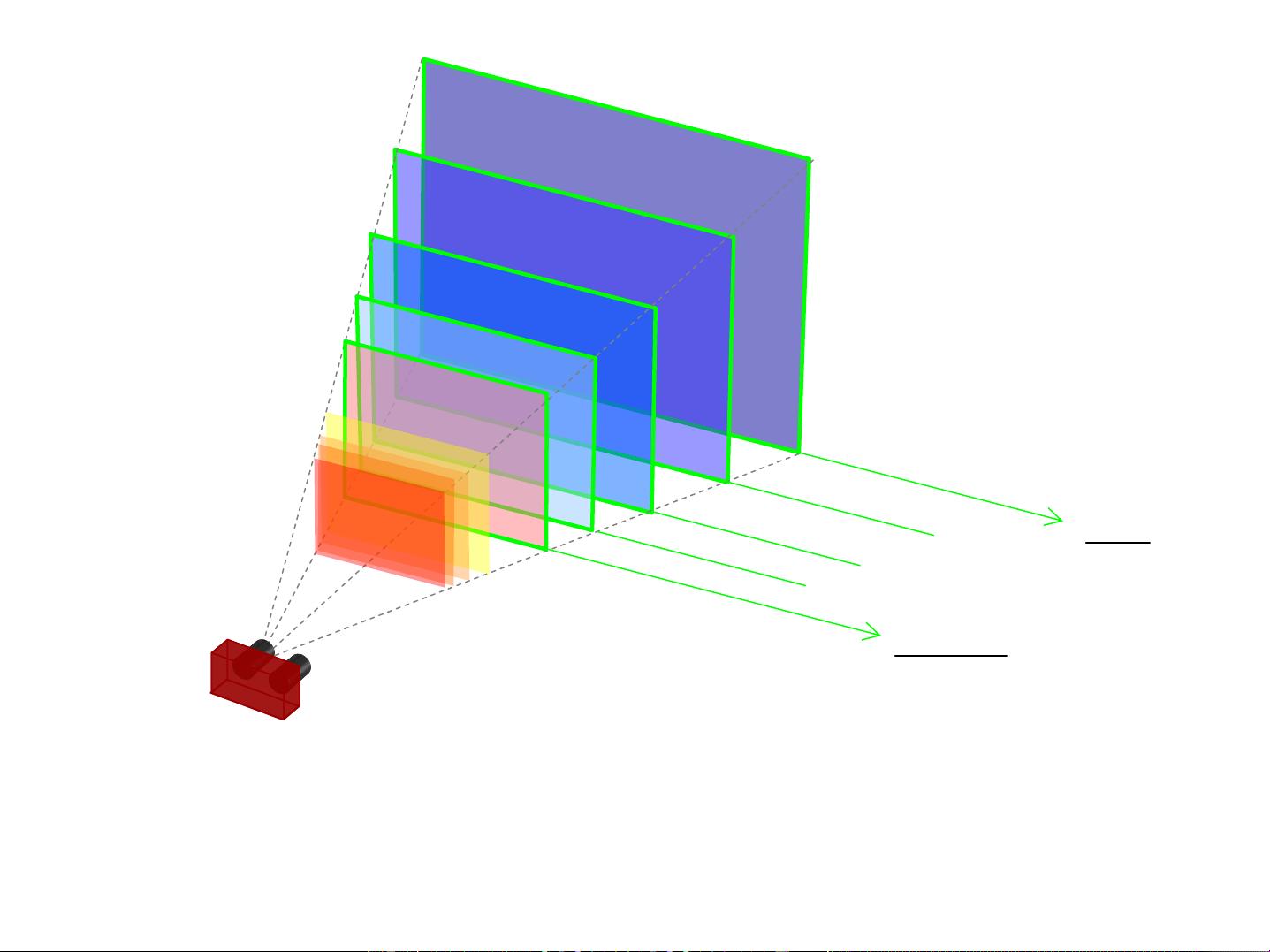
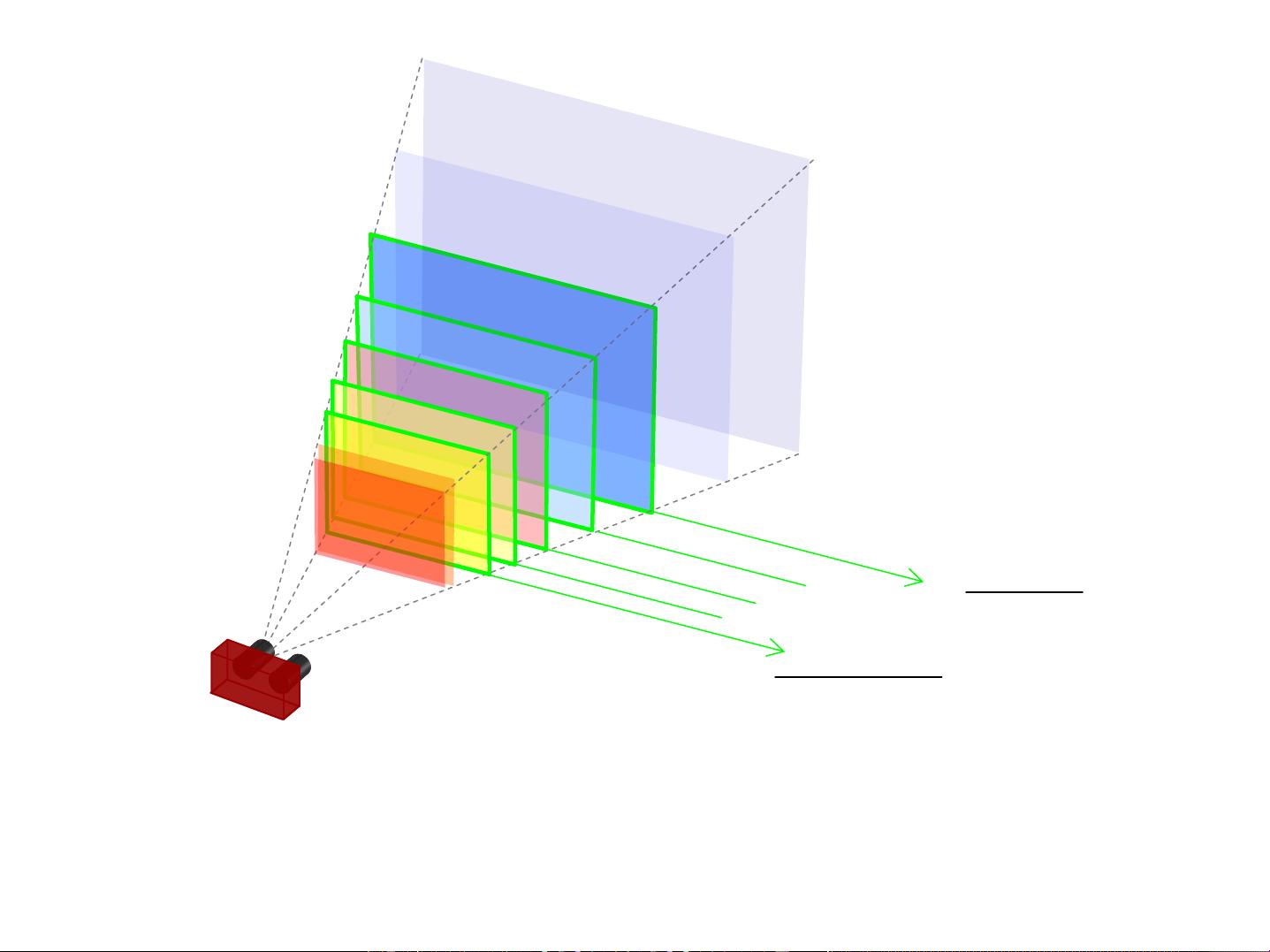
Range field (Horopter)
min
d
fb
⋅
max
d
fb
⋅
Given a stereo rig with baseline b and focal length f, the
range field of the system is constrained by the disparity
range [d
min
, d
max
].
Horopter
剩余189页未读,继续阅读
2024-10-10 上传
2023-08-16 上传
2014-12-06 上传
2015-10-10 上传
2012-04-25 上传
2014-04-02 上传

dongzihaotajiu
- 粉丝: 4
- 资源: 21
 我的内容管理
展开
我的内容管理
展开







最新资源
- 新型智能电加热器:触摸感应与自动温控技术
- 社区物流信息管理系统的毕业设计实现
- VB门诊管理系统设计与实现(附论文与源代码)
- 剪叉式高空作业平台稳定性研究与创新设计
- DAMA CDGA考试必备:真题模拟及章节重点解析
- TaskExplorer:全新升级的系统监控与任务管理工具
- 新型碎纸机进纸间隙调整技术解析
- 有腿移动机器人动作教学与技术存储介质的研究
- 基于遗传算法优化的RBF神经网络分析工具
- Visual Basic入门教程完整版PDF下载
- 海洋岸滩保洁与垃圾清运服务招标文件公示
- 触摸屏测量仪器与粘度测定方法
- PSO多目标优化问题求解代码详解
- 有机硅组合物及差异剥离纸或膜技术分析
- Win10快速关机技巧:去除关机阻止功能
- 创新打印机设计:速释打印头与压纸辊安装拆卸便捷性
