TwinCAT NC 2.10版实用教程:伺服驱动与PLC无缝集成
需积分: 9 96 浏览量
更新于2024-07-19
1
收藏 11.4MB PDF 举报
TwinCAT NC 是一款由德国贝克霍夫(BECKHOFF)公司推出的基于PC的运动控制软件,专为提升产业机械自动化水平而设计。Version 2.10版本的教程针对自动化工程师提供实用指南,特别是在伺服驱动器控制方面。TwinCAT NC 在设计上融合了多种优势,它允许用户无缝集成NC( Numerical Control,数控)与PLC( Programmable Logic Controller,可编程逻辑控制器),支持各种接口如脉冲、模拟量、现场总线和以太网,从而提供更大的驱动器和电机选择自由度。
相较于传统方法A,即使用伺服驱动器厂家的软件工具,或者方法B,采用独立第三方运动控制系统,TwinCAT NC 的优势在于其灵活性和通用性。它能够控制任意伺服驱动器和电机,同时避免了PLC厂商软件对硬件的限制。此外,TwinCAT NC 还允许开发者在没有实际硬件的情况下在计算机上进行程序模拟和调试,这对于开发和调试过程极其便利,辅助工具ScopeView则提供了实时数据可视化功能。
该教程详细介绍了TwinCAT NC 软件的工作原理、软件模型以及实际应用中的关键要点和操作步骤。书中包含丰富的实例和源代码,适合希望深入学习运动控制编程的工程师,无论他们是否熟悉贝克霍夫的产品。无论是初次接触TwinCAT NC 的新手,还是已有一定经验的从业者,都能从中获益,从而提升产业机械的自动化水平,降低人力成本,提高生产效率。
本书的目标读者是工业自动化领域的工程师和技术人员,特别是那些寻求提升伺服驱动器控制技能和采用TwinCAT NC 进行高效编程的人员。通过阅读和实践书中的内容,读者将能够建立起坚实的运动控制编程基础,体验到编程的自由和创新的乐趣。同时,TwinCAT NC 的开源性质意味着用户可以通过官方网站免费获取开发版软件和相关工具,进一步推动了技术在行业的普及和发展。
TwinCAT NC PTP 实用教程
- 12 -
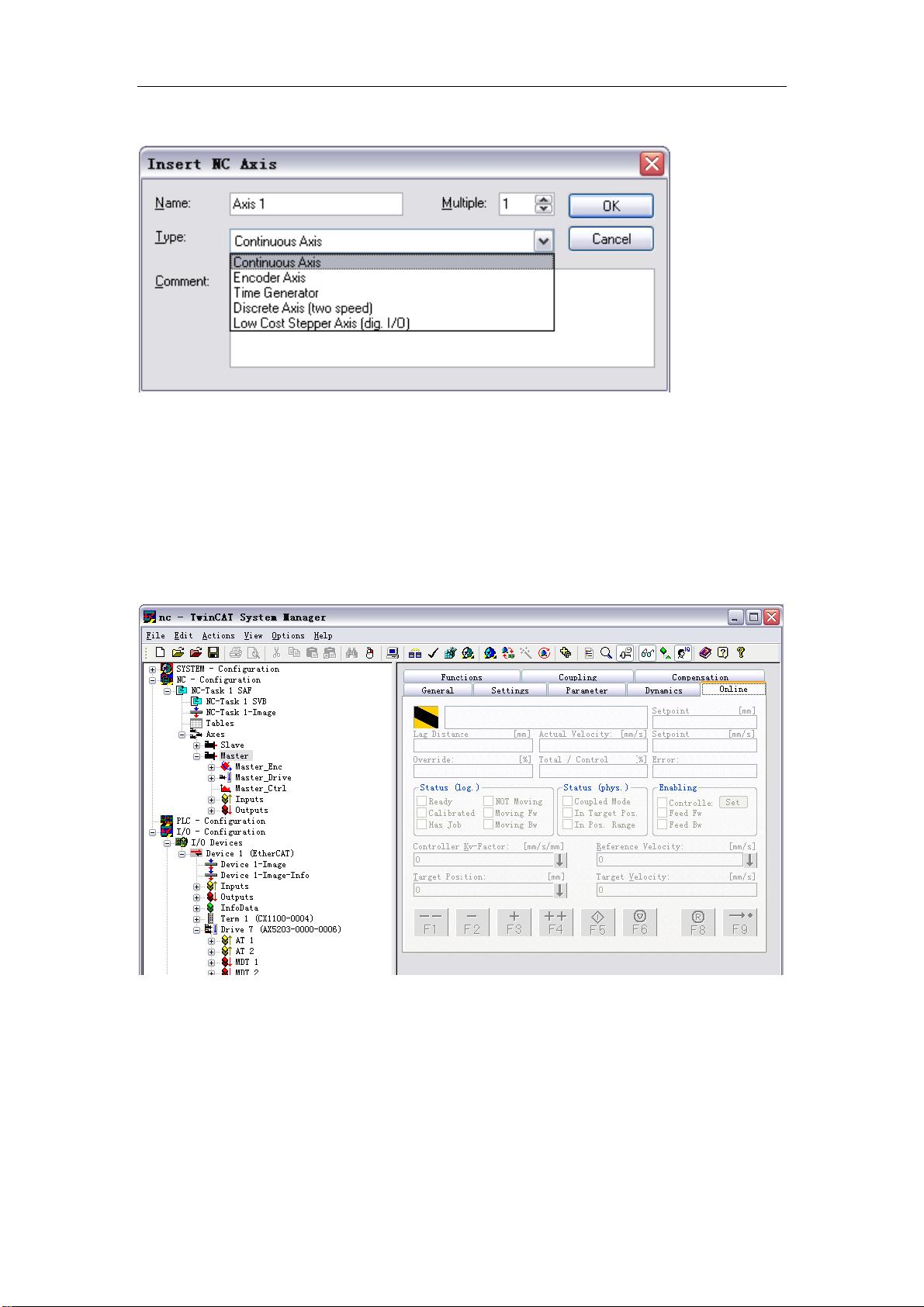
第四步:输入轴的名称,选择轴的类型和数量
Continuous:默认类型,连续轴。NC 能连续地闭环控制该轴的动作。
Encoder Axis:编码器轴,NC 只能读取位置,但不能控制该轴的动作。通常用作主轴。
Multiple:添加轴的数量,所有类型轴总共不得超过 255 个。
Time Generator:时间轴,总是以 1mm/s 速度匀速运动,常常用作主轴。
Discrete Axis(Two Speed):不常用。
Low Cost Stepper Axis(dig I/O):不常用。
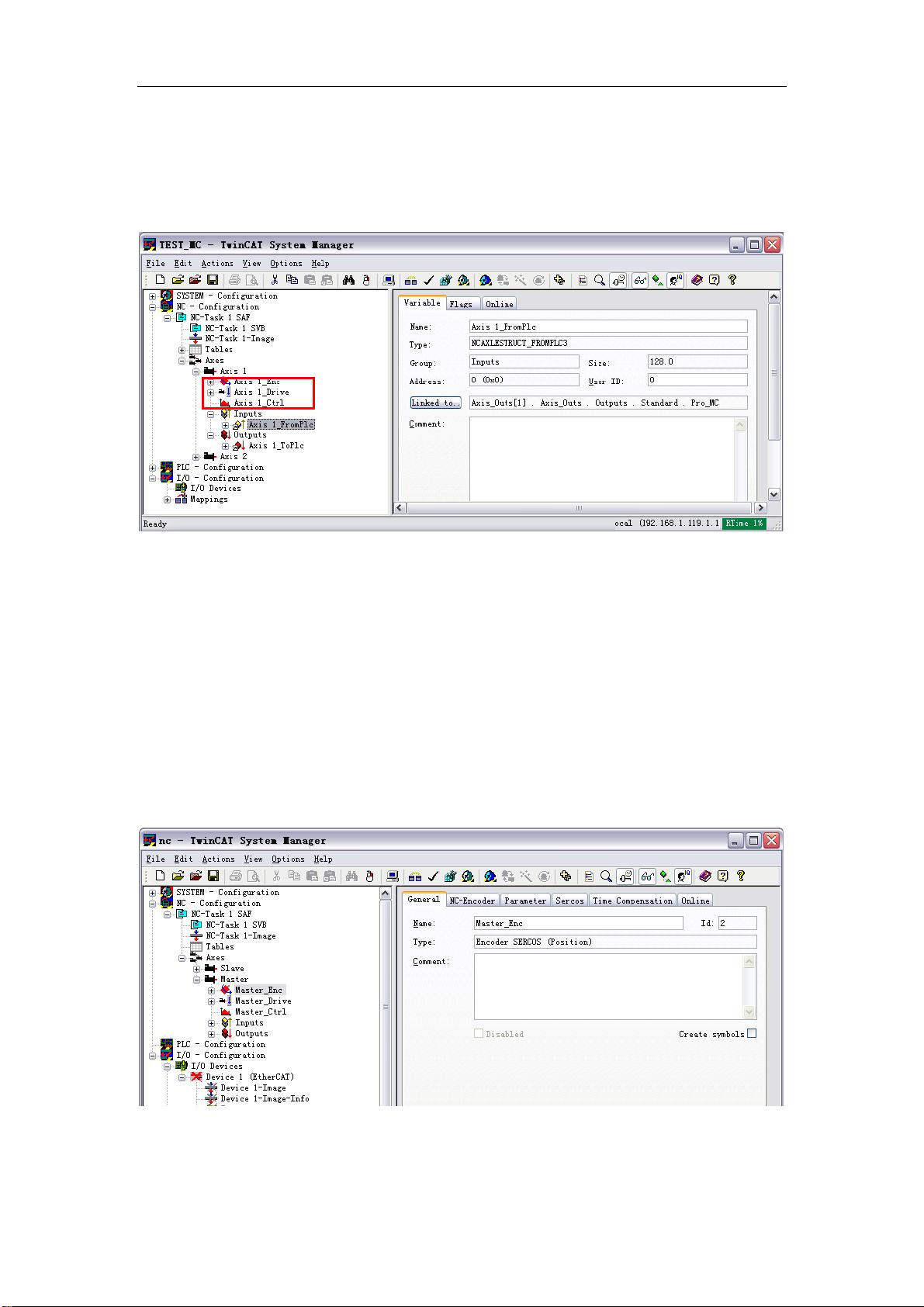
第五步:Axis 添加完成。
Axis 成功添加后,选中左边的树形结构的 Axis 名称时,右边主窗体轴的调试页面组。此
时,这些页面都是灰色的,因为该配置还没有激活。
当目标系统为 Config mode,Online 页面不可用,此时,需要激活配置并切换到 Running
模式,Online 页面才变成彩色,功能按钮可用。
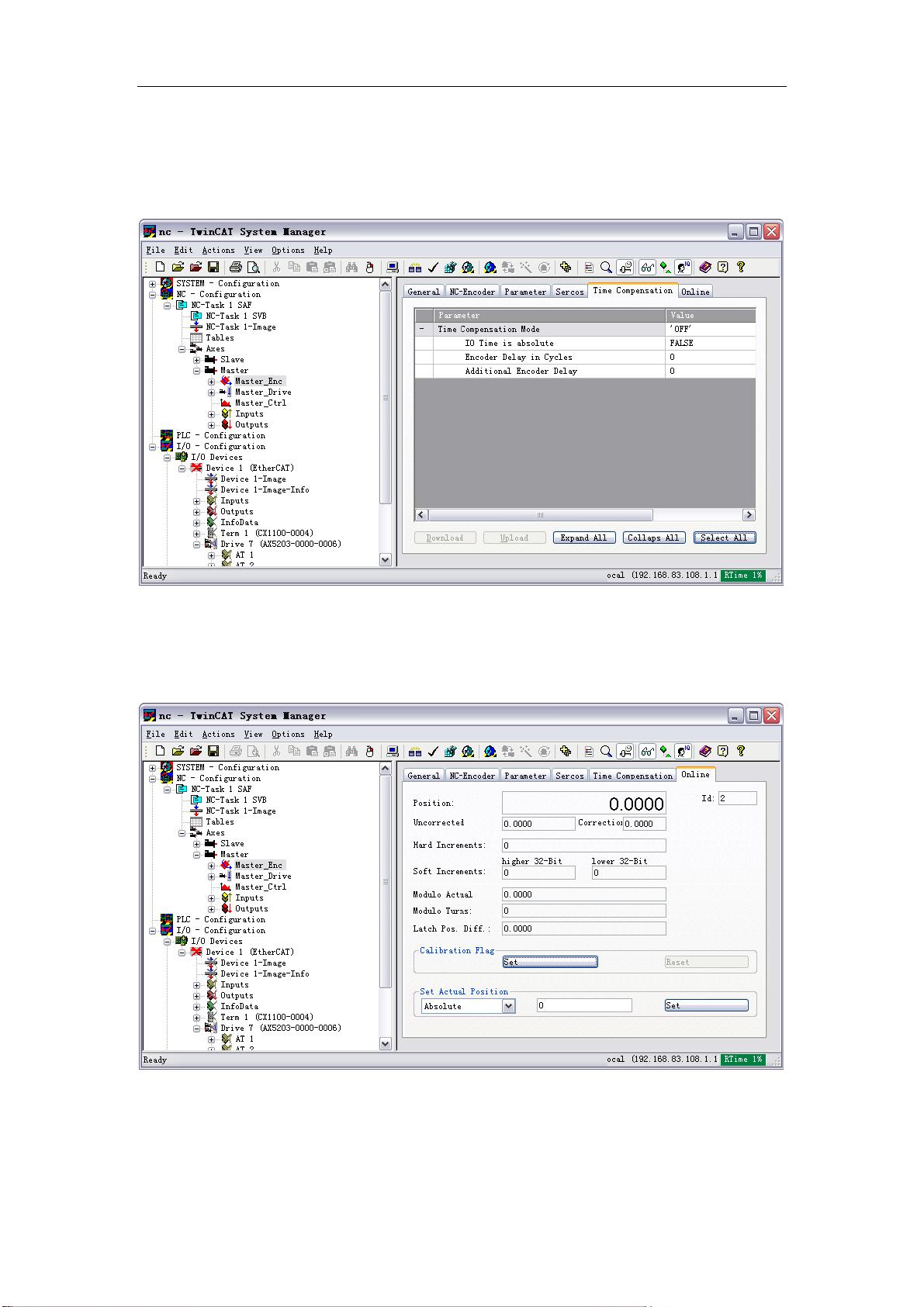
NC 轴添加完成后,就可以设置轴的参数了。


剩余219页未读,继续阅读
2020-03-30 上传
2019-02-13 上传
2017-09-08 上传
2017-08-22 上传
2012-02-16 上传
159 浏览量
2019-12-20 上传

XSERAMA
- 粉丝: 0
- 资源: 8
 我的内容管理
展开
我的内容管理
展开







最新资源
- MATLAB新功能:Multi-frame ViewRGB制作彩色图阴影
- XKCD Substitutions 3-crx插件:创新的网页文字替换工具
- Python实现8位等离子效果开源项目plasma.py解读
- 维护商店移动应用:基于PhoneGap的移动API应用
- Laravel-Admin的Redis Manager扩展使用教程
- Jekyll代理主题使用指南及文件结构解析
- cPanel中PHP多版本插件的安装与配置指南
- 深入探讨React和Typescript在Alias kopio游戏中的应用
- node.js OSC服务器实现:Gibber消息转换技术解析
- 体验最新升级版的mdbootstrap pro 6.1.0组件库
- 超市盘点过机系统实现与delphi应用
- Boogle: 探索 Python 编程的 Boggle 仿制品
- C++实现的Physics2D简易2D物理模拟
- 傅里叶级数在分数阶微分积分计算中的应用与实现
- Windows Phone与PhoneGap应用隔离存储文件访问方法
- iso8601-interval-recurrence:掌握ISO8601日期范围与重复间隔检查
