倒立摆PID控制:MATLAB仿真与性能研究
版权申诉
193 浏览量
更新于2024-07-02
收藏 4.09MB DOC 举报
该文档深入探讨了倒立摆PID控制及其MATLAB仿真的关键技术。倒立摆系统作为典型的非线性、不稳定系统,对于自动控制理论的研究具有重要意义。文章首先介绍了自动控制的基础概念,包括开环和闭环控制,以及各种自动控制系统(如恒值、随动、程序控制、随机调整、线性和非线性系统、连续和离散系统,以及单输入单输出或多输入多输出系统)的特点和性能要求。比例、积分、微分等典型环节在此也有所阐述。
接着,文档详细讲述了MATLAB软件在控制系统仿真中的应用,包括MATLAB的基本介绍、动态仿真功能,以及如何利用MATLAB进行倒立摆系统的建模和仿真。作者构建了一级倒立摆系统的物理模型,通过微分方程、传递函数和状态空间方程来描述其行为,并展示了如何用MATLAB代码实现模型的仿真。
第四章深入研究了PID控制理论,包括PID控制的概述、控制规律(如位置式和增量式PID算法),以及数字PID控制的常见形式,如串级PI控制。这些理论知识为设计和优化倒立摆的PID控制器提供了坚实的理论基础。
实际操作中,作者针对实验室的倒立摆实验装置,设计了PID控制器,并在MATLAB环境中进行了大量的仿真对比,评估了不同控制策略的效果,包括实时控制性能和抗干扰能力。同时,利用MATLAB实时控制软件实验平台,作者进行了现场实验,进一步验证了理论与实践的结合。
最后,文档总结了研究工作,对未来的研究方向进行了展望,强调了倒立摆PID控制技术的实际应用价值。通过这篇论文,读者不仅能深入了解倒立摆PID控制的原理,还能掌握MATLAB在控制系统仿真中的应用技巧。
湖南工业大学本科生毕业设计
6
积分环节的特点是,输出量与输入量对时间的积分成正比。若输入突变,输出值
要等时间T之后才等于输入值,故有滞后作用。输出积累一段时间后,即使使输入为零,
输出也将保持原值不变,即具有记忆功能。只有当输入反向时,输出才反向积分而下
降。常利用积分环节来改善系统的稳态性能。
1.4.3 微分环节
理想的微分环节的微分方程为
(1.5)
其中T为微分时间常数。
对微分方程取拉氏变换后,可求得传递函数
(1.6)
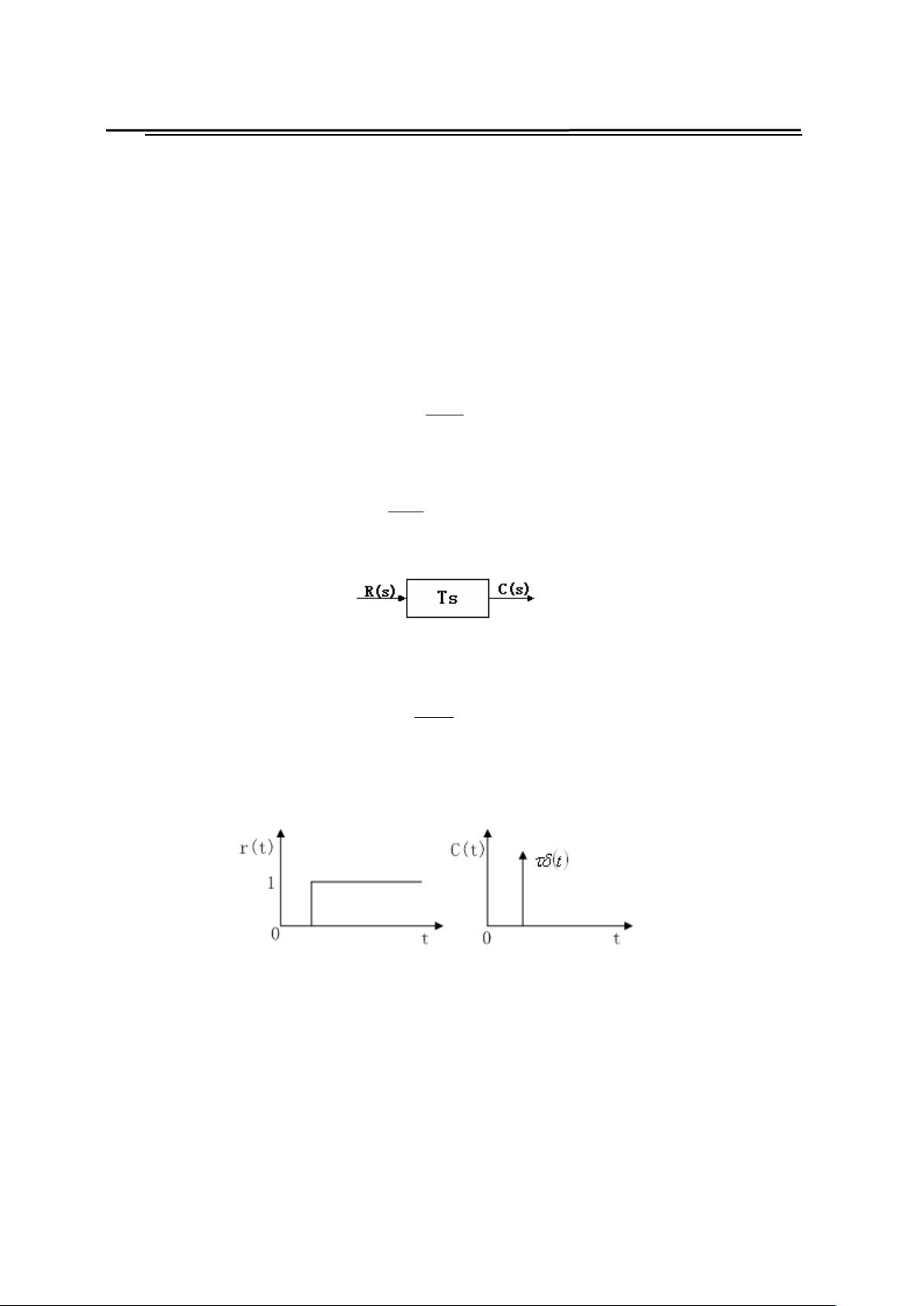
理想的微分环节的方框图如图1.5所示
图 1.5 微分环节方框图
若输入为单位阶跃信号,即
�� ��
ttr 1�
,则输出的单位阶跃响应为
(1.7)
这是一个面积为τ的脉冲,脉冲宽为零,幅值为无穷大,理想微分环节的输入和
输出如图1.6所示。
图 1.6 理想微分环节的单位阶跃响应
微分环节的特点是,其输出与输入信号对时间的微分成正比,即输出反映了输入
信号的变化率,而不反映输入量本身的大小。因此,可由微分环节的输出来反映输入
信号的变化趋势,加速系统控制作用的实现。常利用微分环节来改善系统的动态性能。
� �
��
dt
tdr
Trc �
� �
� �
� �
Ts
sR
sC
sG ��
��
��
��
t
dt
tdr
tC
���
��

剩余46页未读,继续阅读
2022-11-16 上传
2023-08-29 上传
2021-09-18 上传
2022-07-17 上传
2021-12-02 上传
2022-06-26 上传
2022-05-31 上传
2022-01-06 上传
2021-09-17 上传

omyligaga
- 粉丝: 73
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 新型智能电加热器:触摸感应与自动温控技术
- 社区物流信息管理系统的毕业设计实现
- VB门诊管理系统设计与实现(附论文与源代码)
- 剪叉式高空作业平台稳定性研究与创新设计
- DAMA CDGA考试必备:真题模拟及章节重点解析
- TaskExplorer:全新升级的系统监控与任务管理工具
- 新型碎纸机进纸间隙调整技术解析
- 有腿移动机器人动作教学与技术存储介质的研究
- 基于遗传算法优化的RBF神经网络分析工具
- Visual Basic入门教程完整版PDF下载
- 海洋岸滩保洁与垃圾清运服务招标文件公示
- 触摸屏测量仪器与粘度测定方法
- PSO多目标优化问题求解代码详解
- 有机硅组合物及差异剥离纸或膜技术分析
- Win10快速关机技巧:去除关机阻止功能
- 创新打印机设计:速释打印头与压纸辊安装拆卸便捷性
