KUKA KRC4 安全配置指南
需积分: 9 7 浏览量
更新于2024-07-09
收藏 18.22MB PDF 举报
"KRC4 安全配置.pdf"
KRC4是KUKA机器人公司生产的一款先进的机器人控制系统,专门设计用于工业自动化应用。该文档"KRC4 安全配置.pdf"提供了关于如何安全配置KRC4系统的详细指导,旨在确保用户在操作和集成KUKA机器人时遵循最佳实践和安全标准。
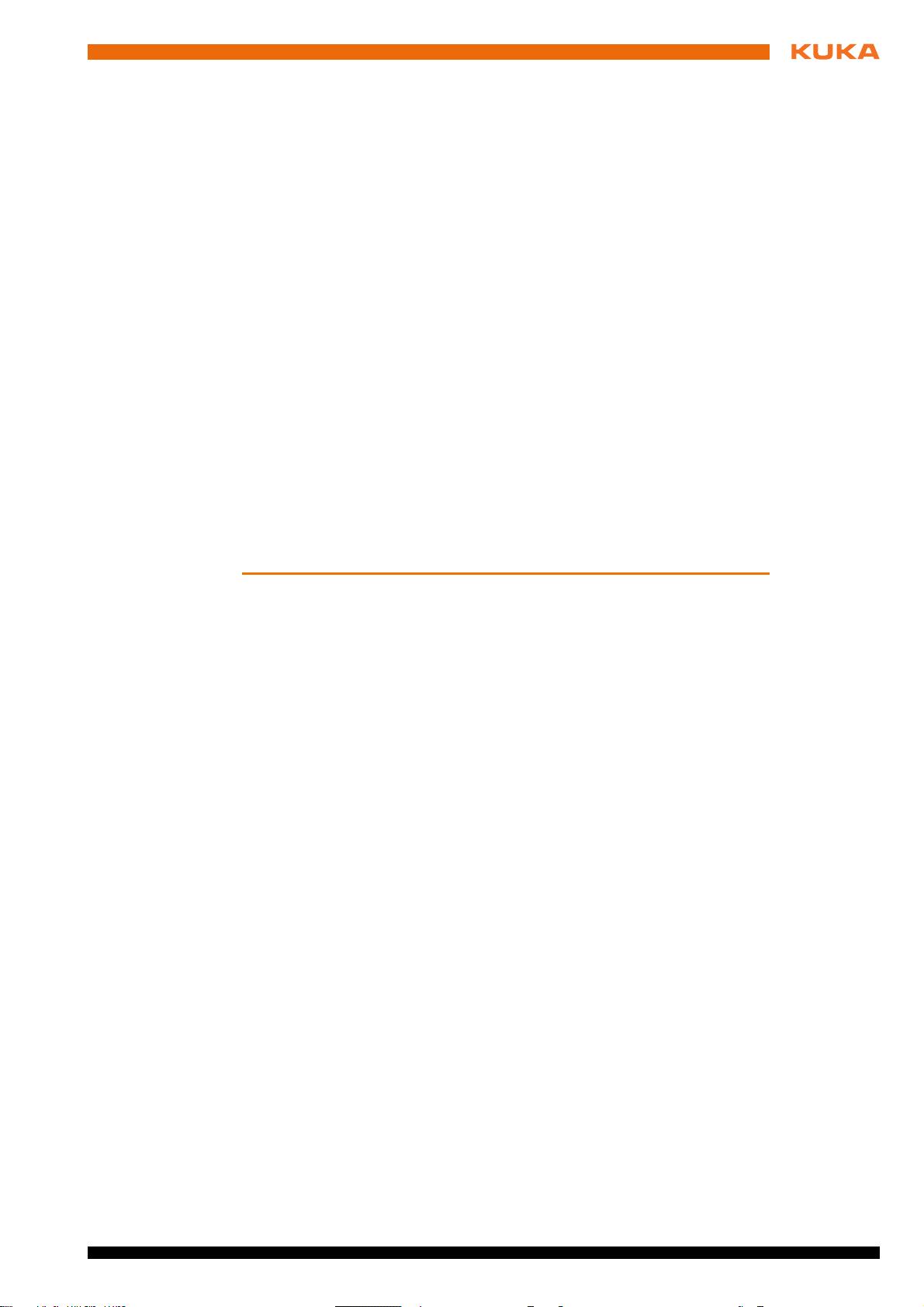
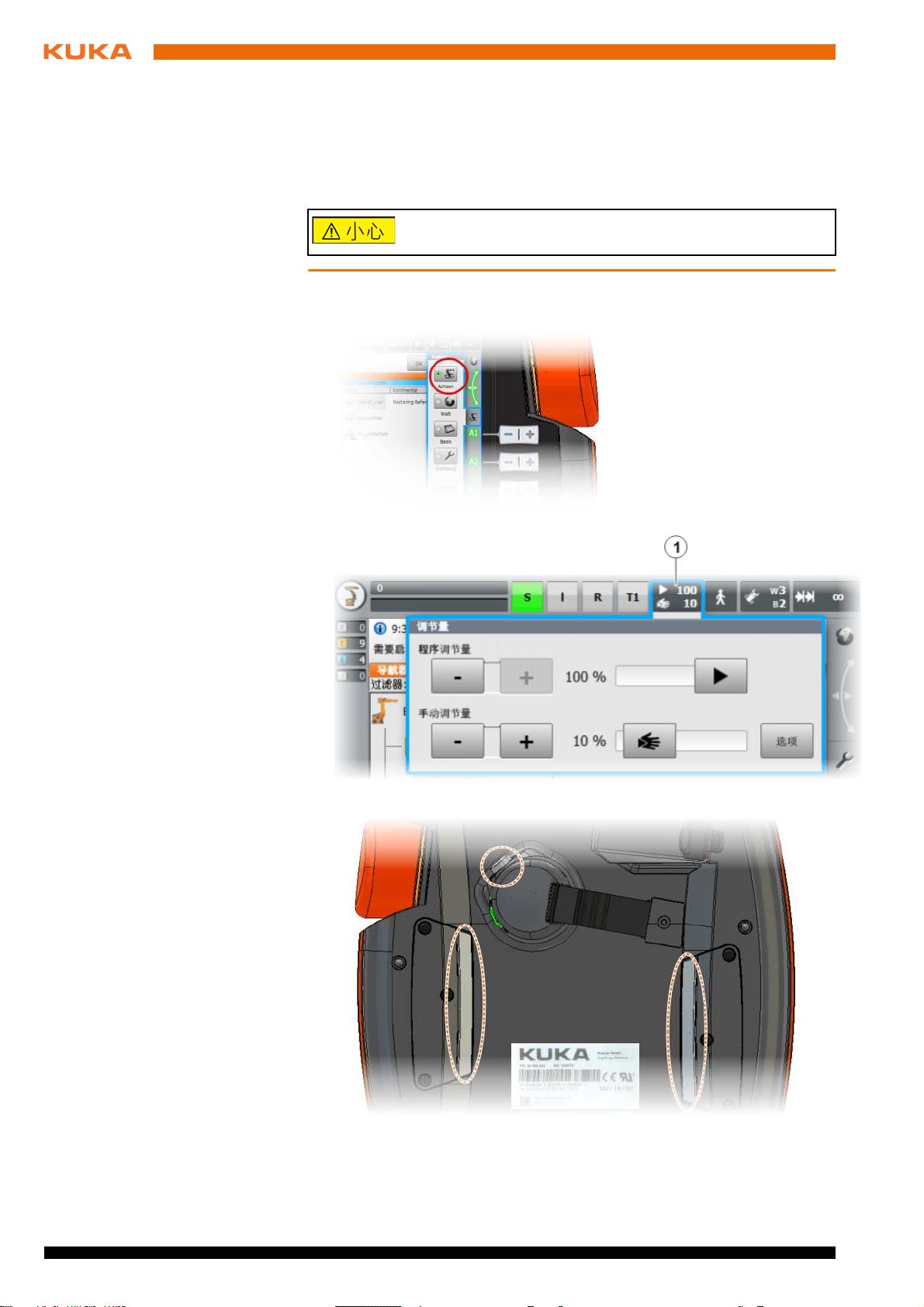
文档开始介绍了KUKA机器人系统的结构和功能,包括其核心部分——KRC4机器人控制系统。KRC4是一款高度集成的控制器,能够精确地管理和协调机器人的运动,确保高效、安全的自动化作业。它支持多种运行模式,用户可以根据不同的任务需求进行选择和设置。
KUKA smartPAD作为人机交互界面,在文档中也占有重要位置。它是一个便携式操作设备,提供了一个直观的图形用户界面,用于监控、编程和控制机器人。文档详细描述了smartPAD的功能和操作方法,包括其概览和在机器人编程中的应用。
文档深入探讨了机器人安全性,这是配置KRC4时不可忽视的一个关键方面。安全配置确保机器人在运行时不会对操作人员和周边环境构成威胁。内容涵盖了如何设置安全限制、运动控制以及紧急停止机制等。
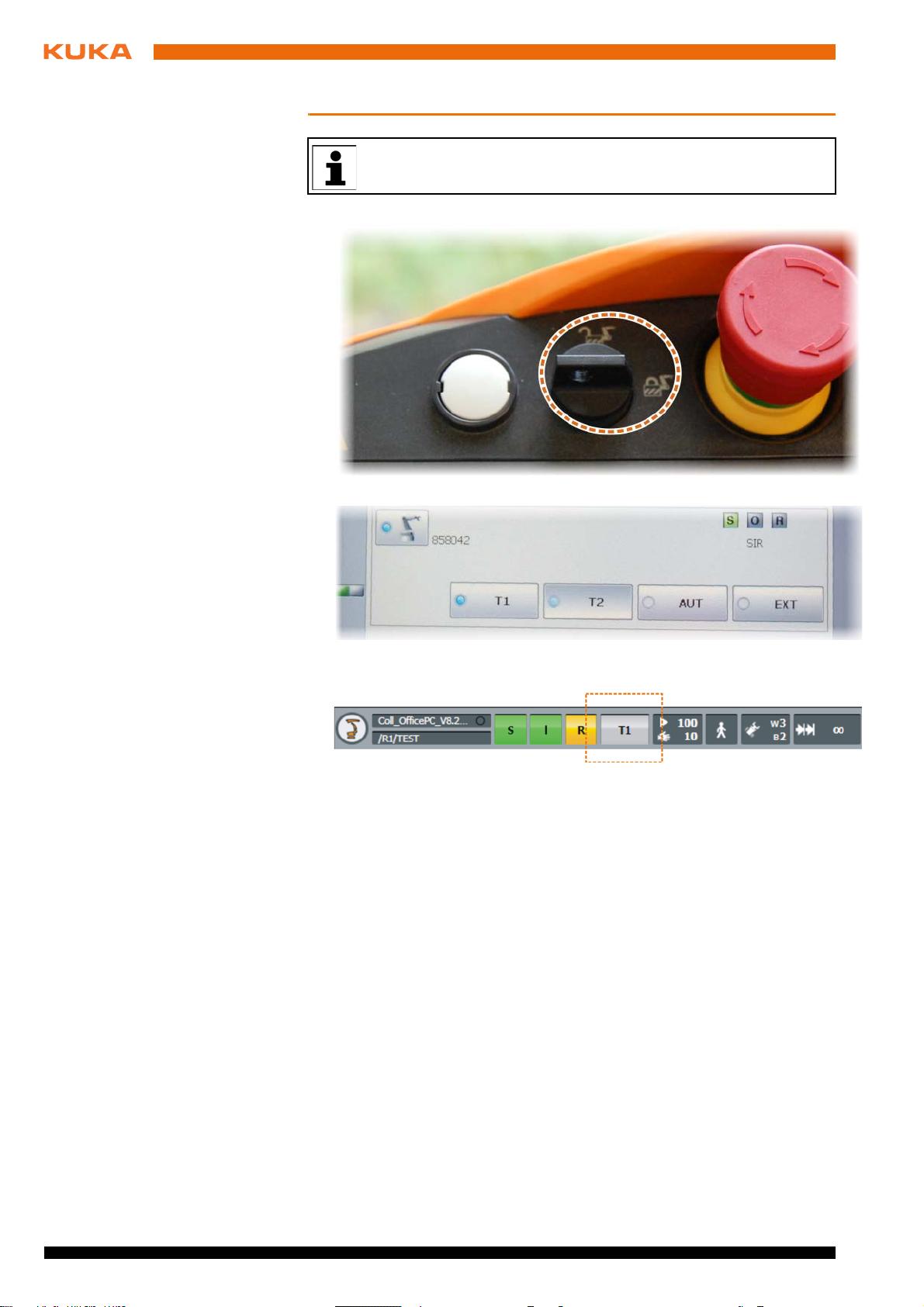
在机器人运动的章节中,文档详尽解释了如何控制机器人在不同坐标系下的运动,如世界坐标系、工具坐标系和基坐标系。这些坐标系的理解和正确设置对于精确定位和路径规划至关重要。文档还包含了实践性的操作指导,帮助用户熟悉手动移动机器人的过程。
投入运行的章节,特别是零点标定,是机器人系统启动前的重要步骤。零点标定原理和实践指导旨在确保机器人能够准确识别其位置,并且能够从一个已知的起始点开始工作。通过零点标定,用户可以校准机器人的运动系统,保证其工作精度。
最后,文档还可能包含故障排除、维护和更新等更多信息,这些都是保证KRC4系统长期稳定运行所必需的。尽管文档的某些部分没有详细列出,但可以预期它会涵盖所有必要的安全配置和操作指南,以满足系统集成商的需求。
"KRC4 安全配置.pdf"是KUKA机器人用户和系统集成商的宝贵参考资料,提供了全面的KRC4安全配置和操作说明,确保用户能够在遵循安全规范的同时,充分利用KUKA机器人的性能。


2019-09-08 上传
2022-06-17 上传
2021-04-15 上传
2023-10-19 上传
2012-12-12 上传
2013-06-24 上传
2019-09-12 上传
110 浏览量
2021-06-11 上传

孙华仔
- 粉丝: 0
- 资源: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- Raspberry Pi OpenCL驱动程序安装与QEMU仿真指南
- Apache RocketMQ Go客户端:全面支持与消息处理功能
- WStage平台:无线传感器网络阶段数据交互技术
- 基于Java SpringBoot和微信小程序的ssm智能仓储系统开发
- CorrectMe项目:自动更正与建议API的开发与应用
- IdeaBiz请求处理程序JAVA:自动化API调用与令牌管理
- 墨西哥面包店研讨会:介绍关键业绩指标(KPI)与评估标准
- 2014年Android音乐播放器源码学习分享
- CleverRecyclerView扩展库:滑动效果与特性增强
- 利用Python和SURF特征识别斑点猫图像
- Wurpr开源PHP MySQL包装器:安全易用且高效
- Scratch少儿编程:Kanon妹系闹钟音效素材包
- 食品分享社交应用的开发教程与功能介绍
- Cookies by lfj.io: 浏览数据智能管理与同步工具
- 掌握SSH框架与SpringMVC Hibernate集成教程
- C语言实现FFT算法及互相关性能优化指南
