




AT89S52单片机控制的循迹智能小车设计
下载需积分: 9 | DOC格式 | 400KB |
更新于2024-11-30
| 171 浏览量 | 举报
"基于单片机的循迹智能小车"
本文主要探讨了基于单片机的循迹智能小车的设计与实现,这种小车能够自动按照预设路径行驶,适用于各种自动化应用场景。智能小车的核心是AT89S52单片机,它负责收集传感器数据并控制小车的行为。在设计中,采用了金属感应器TL-Q5MC来检测路面的铁片,以此获取路径信息,同时利用霍尔元件A44E监测小车速度。1602LCD显示器则用于实时显示行驶时间、距离、平均速度等信息。
智能寻迹车的一个关键组成部分是光电传感器,如文中提及的反射式光电传感器,它们用于区分跑道上的黑白颜色,通过反射光强度差异来确定小车的当前位置和方向。这种传感器配合运算放大器LM324形成传感器模块,可以在不同赛道条件下有效工作,确保小车准确循迹。
驱动系统方面,智能小车采用H桥电路驱动直流电机,实现前后移动、转向和速度控制。前轮转向电机通过分级转向控制实现不同转弯半径下的精准转向,后轮驱动电机则采用开环控制进行速度调节。分级转向电路通过调整舵机中的可变电阻,根据单片机采集的电压值来计算转向角度,确保在不同弯道上实现不同幅度的转向。
此外,文章还提到了一个基于视觉的智能寻迹车设计方案,该方案利用AVR单片机MEGA16为核心,结合路径识别、电机驱动和舵机控制,能够在复杂线型和不确定转弯半径的情况下自主寻迹,通过视觉信息处理实现更高级别的精确导航。
综合来看,基于单片机的循迹智能小车结合了硬件传感器、微控制器和驱动电路,实现了自动化路径跟踪和速度控制。这种技术不仅在娱乐领域如遥控车模中应用,也在未来智能运输系统的自主导航等方面具有广阔的应用前景。
基于光电传感器的智能寻迹车设计与实现
2009-07-28 09:37:54作者:毕巍巍 张雪峰 柴锐 来源:现代电子技术
关键字:智能车 寻迹 AVR
单片机 光电传感器
0 引 言
智能运输系统是未来交通运输系统发展的趋势,智能汽车在智能运输系统中扮演着十分
重要的角色。作者提出智能寻迹车作为构建未来智能交通运输系统中重要部分,针对未来
交通运输系统有导航线的环境命题假设下智能汽车的自主寻迹问题,提出一种基于视觉的
智能寻迹车模设计方案,作为该假设问题的解决方案。
基于视觉的智能寻迹车模设计方案能够在线型复杂,转弯半径不确定性大的情况下,利
用视觉自主寻迹前进,分级精确转向。
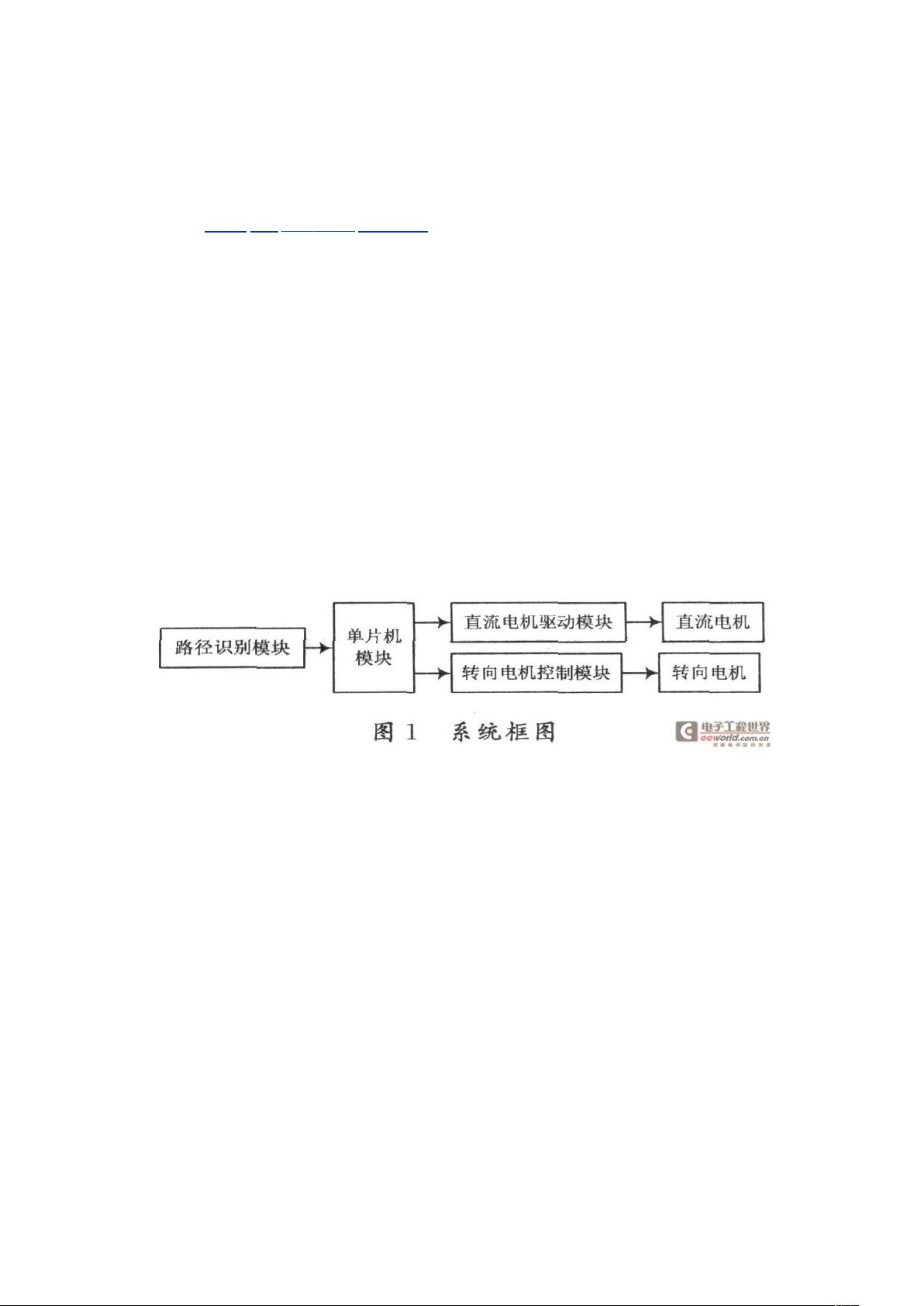
1 系统总体设计
基于视觉的智能寻迹车模系统以 AVR 单片机 MEGA16 为核心,由单片机模块、路径识
别模块、直流电机驱动模块、舵机驱动模块等组成,如图 1 所示。
直流电动机为车辆的驱动装置,转向电动机用于控制车辆行驶方向。智能寻迹车模利用
视觉在跑道上自主寻迹前进,分级精确转向。道路为 318 mm 宽白色底板,其中间粘贴
18 mm 宽且线型不断变化的黑胶带。
2 硬件设计
2.1 控制模块
寻迹车模采用 AVR 内核的 ATMEGAl6。该芯片能够不需要外围晶振和复位电路而独立
工作,非常适合智能寻迹车模的要求。控制器模块安装在广东奥迪玩具实业有限公司生产
的雷速登 1:24 比赛级遥控车模上。
2.2 路径识别模块
采用反射式光电传感器来区分跑道上的黑色与白色,反射式光电传感器有光线发射端和
光线接收端,白底与黑线对发射端发出光线的反射度不同,从而影响接收端产生的电压。
用反射式光电传感器、可调电阻和运算放大器 LM324 组成传感器模块,如图 2 所示。实
现在不同赛道上输出高低电平,自主寻迹。
下载后可阅读完整内容,剩余4页未读,立即下载
相关推荐
3100 浏览量
425 浏览量
438 浏览量
334 浏览量
206 浏览量
2024-01-27 上传
2022-05-15 上传
1064 浏览量
176 浏览量

yueyinglanggu
- 粉丝: 2
 我的内容管理
展开
我的内容管理
展开








最新资源
- 如何检测SD卡是否扩容?使用专业鉴别工具
- 深入解析PID调试工具:调试与优化
- Electron React Boilerplate:构建和打包桌面应用程序指南
- 基于MATLAB的凸集投影法POCS超分辨率重建技术
- C语言实现的Barsky梁友栋二维裁剪算法
- 基于MFC的简易MP3播放器制作教程
- C#网站系统图片上传及名称修改教程
- 实现网页元素的固定位置浮动效果 - jquery.floatdiv插件
- Cocos2d-x RPG游戏完整开发资源包
- Spring Boot 数据库操作教程:JSON 到 H2 数据库
- JSP技术打造的网上电子商城购物与管理平台
- 微型计算机控制技术全面解析PPT课件
- 微软运行库合集v2019.7.20:Windows环境必备工具
- Nirsoft中文资源包更新至1.19.96版本
- 裂纹监视器软件:疲劳裂纹自动测量与分析
- Java运行环境JRE 1.6版本下载指南






















