主动悬架LQG控制器设计与仿真分析
需积分: 35 167 浏览量
更新于2024-08-12
收藏 242KB PDF 举报
"具有LQG控制器的主动悬架半车模型动力学分析与仿真 (2012年),由张海涛等人发表于《安徽工程大学学报》第27卷第1期,主要探讨了如何利用最优控制理论设计LQG控制器来提升汽车主动悬架系统的性能。通过在Matlab/Simulink中建立仿真模型,对比分析了主动悬架与被动悬架在应对白噪声路面输入时的动态特性,结果显示主动悬架在行驶平顺性和操纵稳定性方面有显著改善。"
本文的核心知识点包括:
1. 达朗贝尔原理:这是一种用来建立动力学模型的方法,它将静力学和动力学结合起来,用于分析系统在受力下的运动状态。在这里,该原理被用于构建半车主动悬架的动力学模型。
2. 主动悬架系统:与传统的被动悬架相比,主动悬架能够根据实时路况和车辆状态调整其性能,以提高行驶平顺性和操纵稳定性。它通过控制系统对悬架施加适当的力,以抵消路面不平带来的振动。
3. 最优控制理论:这是一门数学理论,用于寻找能够使系统性能指标达到最优的控制策略。在此研究中,最优控制理论被用于设计LQG控制器,以最小化悬架系统的误差和动态响应。
4. LQG控制器:LQG(Linear Quadratic Gaussian)是一种融合了线性二次型最优控制和Kalman滤波器的控制器,适用于存在随机噪声的系统。LQG控制器的设计简化了计算量,需要的测量参数较少,且能有效处理不确定性。
5. Matlab/Simulink仿真:这是一个强大的建模和仿真工具,用于模拟复杂系统的行为。在这里,研究人员用它来构建主动悬架系统的仿真模型,以模拟白噪声路面输入条件下的系统动态特性。
6. 系统动态特性仿真:通过引入白噪声路面输入,仿真了主动悬架系统在实际驾驶环境中的行为,对比了主动和被动悬架的性能差异。这种方法有助于评估不同控制策略对系统性能的影响。
7. 性能比较:仿真结果表明,主动悬架在减少振动、提高行驶平顺性和操纵稳定性方面优于被动悬架,这对于提升驾驶舒适性和安全性至关重要。
8. 汽车动力学:文章中涉及的汽车动力学模型考虑了车体质量、转动惯量、轴距、悬架刚度和阻尼系数等因素,这些是决定车辆动态性能的关键参数。
9. 控制策略优化:通过对LQG控制器参数的选择和优化,研究者能够在不增加过多硬件成本和复杂性的情况下,改进悬架系统的性能。
这篇论文通过理论分析、模型建立和仿真验证,深入研究了如何运用LQG控制器优化主动悬架系统,为汽车悬架控制技术的发展提供了有价值的参考。
第
27
卷第
1
期
2012
年
3
月
安徽工程大学学报
Journal of Anhui Polytechnic University
Vo
l.
27.
No. 1
Mar.
,2012
文章编号
:16722-477(2012)01-0042-04
具有
LQG
控制器的主动悬架
半车模型动力学分析与仿真
张海涛
1
,高洪
l\
查为民
2
孟舒
2
(1.安徽工程大学先进数控与伺服驱动技术安徽省重点实验室,安徽芜湖
241000;
2.
芜湖市质量技术监督局,安徽芜湖
摘要:基于达朗贝尔原理建立半车主动悬架动力学模型,采用最优控制理论进行主动悬架
LQG
控制器设计.
在
Matlab/Simulink
中建立对应的系统仿真模型,采用自噪声路面输入后进行该系统动态特性仿真,并将主、
被动悬架特性进行对比分析.仿真结果表明,相对于被动悬架主动悬架性能有明显改善.
关键词:主动悬架;最优控制
;LQG
控制器
中图分类号:
U46
1.
4
文献标识码
:A
随着人们对汽车行驶平顺性和操纵稳定性要求越来越高,设计一个具有良好综合性能的悬架已成为
现代汽车研究的一个重要专题.将现代控制理论及其控制技术应用于汽车悬架系统的控制器设计中,可获
得良好的乘坐舒适性和操纵稳定性.在汽车悬架控制系统研究中,通常采用的控制方法有
PID
控制器、鲁
棒控制等,其实现容易,但设计变量多,需要测量的参数也相对较多,计算相对复杂.最优控制算法计算量
小,需要测量的参数较少[1]本文通过对半车模型主动悬架
LQG
控制器的设计,参数的选择和动态仿真
平台的建立以及仿真结果的对比分析研究发现,
LQG
控制器的设计可使汽车在不平路面的激励作用下,
行驶平顺性和操纵稳定性及安全性的要求有较好地改善.对于主动悬架控制系统的研究具有重要意义.
1
主动悬架的半车模型建立
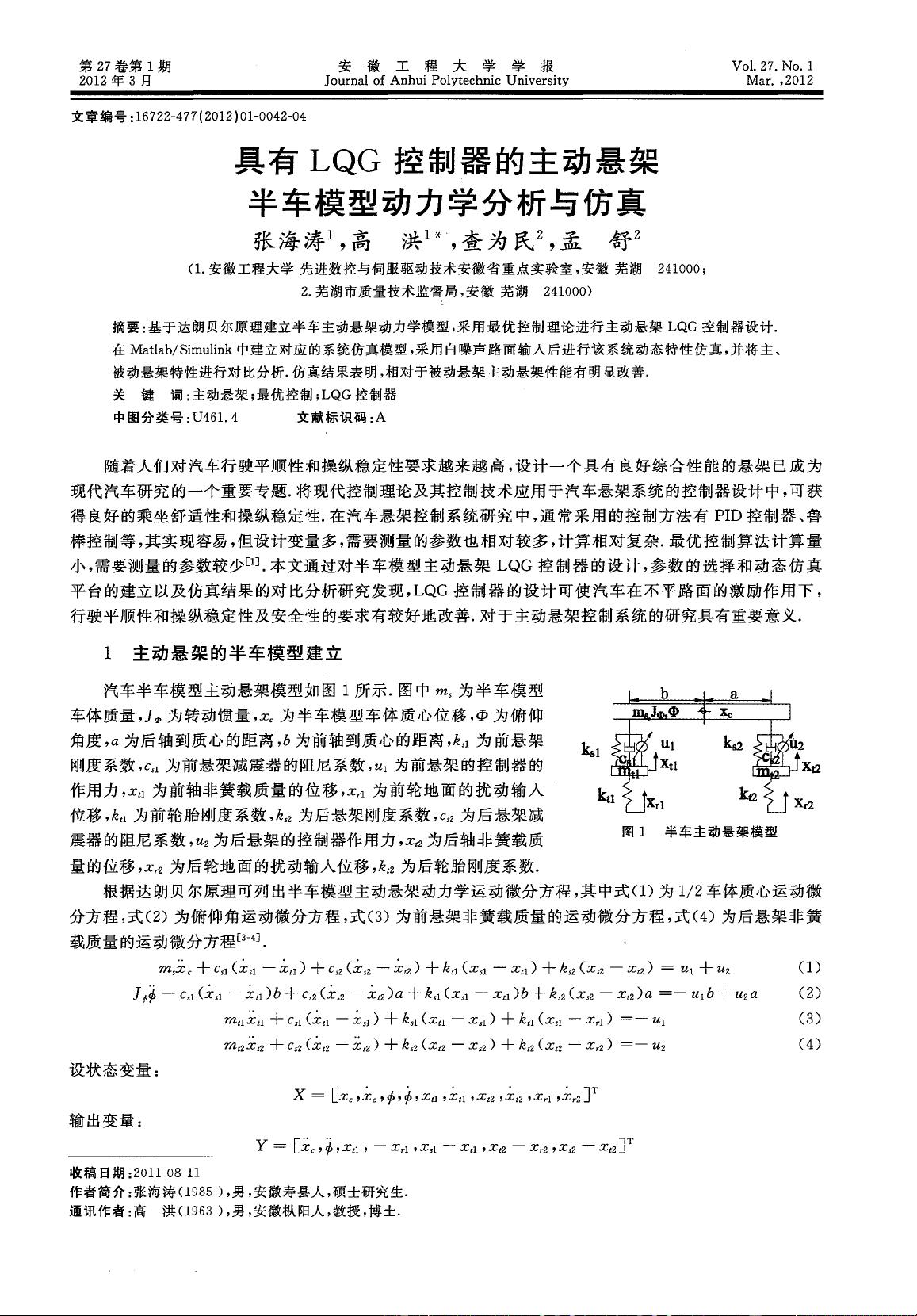
汽车半车模型主动悬架模型如图
1
所示.图中
ms
为半车模型
车体质量,九为转动惯量
,
X
c
为半车模型车体质心位移,
φ
为俯仰
角度
,
a
为后轴到质心的距离
,
b
为前轴到质心的距离
,
k
s1
为前悬架
刚度系数
,
C
s1为前悬架减震器的阻尼系数,均为前悬架的控制器的
作用力
,
X'l
为前轴非簧载质量的位移
,
Xrl
为前轮地面的扰动输入
位移
,
ktl
为前轮胎刚度系数
,
k
s2
为后悬架刚度系数
,
C
s
2
为后悬架减
震器的阻尼系数
,
U2
为后悬架的控制器作用力
,
X'2
为后轴非簧载质
量的位移
,
X
r
2
为后轮地面的扰动输人位移
,
k'2
为后轮胎刚度系数.
ksl
X
t2
图
1
半车主动悬架模型
根据达朗贝尔原理可列出半车模型主动悬架动力学运动微分方程,其中式(1)为
1/2
车体质心运动微
分方程,式
(2)
为俯仰角运动微分方程,式
(3)
为前悬架非簧载质量的运动微分方程,式
(4)
为后悬架非簧
载质量的运动微分方程[叫.
msx
c
+ Csl
(Xsl
-
X'l)
十
C
s
2
(X
s
2
-
X(2)
十
k
s1
(Xsl
-
X'l
)十
k
s2
(X
s
2
-
X(2)
=
Ul
+ U2
(1)
J
~<þ
- Csj
(Xsl
-
x'l)b
+ C
s
2
(X
s
2
-
x(2)a
+ k
s1
(Xsl
-
xtl)b
+ k
s2
(X
s
2
-
X
ρα
=-u
1
b+U2
α(2)
mtlX'l
+ Csl
(X'l
-
Xsj)
+ k
s1
(X'l
-
Xsl)
+
k'l
(X'l
-
Xrl)
=-
Uj
(3)
m'2X
t2
+ C
s
2
(X'2
- X
s
2)
+ k
s2
(X'2
- X
s
2)
+
k'2
(X'2
- X
r
2)
=-
U2
(4)
设状态变量:
x
[x
c
,
x
c
啡
,
ø
,
X
t1
,X
t1
, X
t
2 ,X
t
2 ,
Xrl
,X
r
2J
T
输出变量:
=[ι
,且
,
X
t
l'
- X
r
l
,
X
s
l
一句
,
X'2
一句
,
X
s
2
-
X'2J
T
收稿日期
:2011-08-11
作者简介:张海涛
0985-)
,男,安徽寿县人,硕士研究生.
通讯作者:高
洪
0963-)
,男,安徽板阳人,教授,博士.
下载后可阅读完整内容,剩余3页未读,立即下载
142 浏览量
109 浏览量
233 浏览量
928 浏览量
2021-10-08 上传
272 浏览量
125 浏览量

weixin_38537941
- 粉丝: 1
- 资源: 926
 我的内容管理
展开
我的内容管理
展开







最新资源
- SAP服务器端安装手册
- MATLAB编程(第二版)-菜鸟入门教材
- The C++ Programming Language Special 3rd Edition
- Eclipse中安装SVN插件
- 微软Speech SDK 5.1开发语音识别系统的主要步骤
- ExtJs简明教程使用ExtJs
- smallworld GoogleEarth配置
- VS2005微软官方教程
- smallworld安装
- 空间数据处理插值 -非常系统
- 编写shell脚本编写shell脚本编写shell脚本
- 新编Windows API参考大全
- smallworld使用配置
- OSWorkflow教程
- OSWorkflow中文手册
- C#连接各种数据库的方法
