网络RTK算法:高精度实时定位技术探究
需积分: 22 29 浏览量
更新于2024-08-13
收藏 287KB PDF 举报
"这篇论文详细探讨了网络RTK算法的研究与实验,强调了网络RTK在实时定位领域的优势,如高精度、高可靠性和成本效益。作者针对网络RTK的整周模糊度搜索和用户误差估算等关键算法进行了深入研究,并通过实际数据处理展示了网络RTK的定位效果。该研究发表于2009年的《武汉大学学报·信息科学版》。"
网络RTK(Real-Time Kinematic)是全球定位系统(GPS)的一种高精度定位技术,相较于传统的单基站RTK,网络RTK利用多个基准站的数据来提高定位精度和可靠性。在20世纪90年代中期,RTK技术迅速发展,但受限于单基站的距离限制,无法实现远距离的高精度实时定位。为了解决这个问题,网络RTK应运而生。
网络RTK技术的核心在于利用多个分布在广泛区域内的基准站,这些基准站可以提供实时的观测数据,通过对电离层、对流层折射等距离相关误差的改正,扩大了定位范围并提升了定位质量。系统通常包括基准站网络、计算与控制中心、系统用户和数据通信四个组成部分。基准站网络负责收集GPS数据,计算与控制中心处理这些数据并生成改正信息,然后通过数据通信网络将这些信息发送给用户,用户端则根据接收到的信息进行实时坐标估计。
论文中提到的关键算法包括整周模糊度搜索和用户误差估算。整周模糊度搜索是RTK定位中的核心步骤,涉及到对载波相位观测值的整数解算,这一过程直接影响到定位的精度和速度。用户误差估算则是对流动站观测数据进行处理,考虑各种误差源(如接收机钟差、大气延迟等),以提高最终定位的准确性和稳定性。
实验部分,作者使用基于所研究算法的软件处理实测数据,验证了网络RTK的定位性能。这表明,网络RTK不仅能在保持高精度的同时扩大服务范围,还提高了系统的可用性,是未来实时定位技术的重要发展方向。
这篇论文对网络RTK技术的理论和实践进行了深入探讨,为后续的GPS定位技术研究提供了宝贵的参考。通过整合多基站信息,网络RTK极大地增强了GPS的实时定位能力,对于测绘、导航、地球物理学等领域有着广泛应用前景。
第
34
卷第
11
期
2009
年
11
月
武汉大学学报·信息科学版
Geomatics and Information Science of Wuhan University
Vo
l.
34
No.
11
Nov. 2009
文章编号
:1671-8860(2009)11-1350-04
文献标志、码
:A
网络
RTK
算法研究与实验
高星伟
l
陈锐志
2
赵春梅
l
(1
中国测绘科学研究院,北京市北太平路
16
号,
100039)
(2
芬兰大地测过研究所,马萨拉,芬兰
.0243
1)
摘
要:与常规
RTK
相比,网络
RTK
具有明显的优势,主要包括实时定位精度高、可靠性和可用性高以及高
成本有效等,因此它是未来实时定位发展的一个主要方向。对网络
RTK
的整周模糊度搜索、用户误差估算
等相关算法进行了有益的研究,用基于本文算法的软件对实测数据进行了处理,给出了网络
RTK
的定位
结果。
关键词
:GPS;
网络
RTK;
综合误差内插
申图法分类号:
P228.
41
20
世纪
90
年代中期,
RTK
定位技术得到了
快速发展,它包括一个位置己知的基准站,通过
VHF
、
UHF
电台或移动通信等数据链路向流动
站播发原始观测值和/或观测值改正数;流动站的
数据处理包括差分载波相位的模糊度解算和流动
站的坐标估计。常规
RTK[
I.2
J
的主要缺点是:为
了能够快速、准确地解算载波相位模糊度,流动站
与基准站之间的距离不能超过1O
~20
kmo
这是
由电离层和对流层折射、轨道误差等与距离相关
的误差造成的。然而,这些误差可以用流动站周
围的多个基准站信息进行改正或估算。
20
世纪
末,
RTK
定位技术由单基准站
RTK
向多基准站
RTK
发展,这种多基准站
RTK
定位技术又称为
网络
RTK[l
,幻。
1
网络
RTK
网络
RTK
技术是一种利用多基准站信息改
善用户定位的高精度实时定位技术。具体是在一
个地区建立多个(一般至少
3
个)基准站,并基于
这些基准站(全部或部分)为其覆盖区域内和周边
的流动站播发原始观测值和/或观测值改正数,流
动站的数据处理同样包括差分载波相位的模糊度
解算和流动站的实时坐标估计[2.3
J
。
收摘自期:
2009-09-15
。
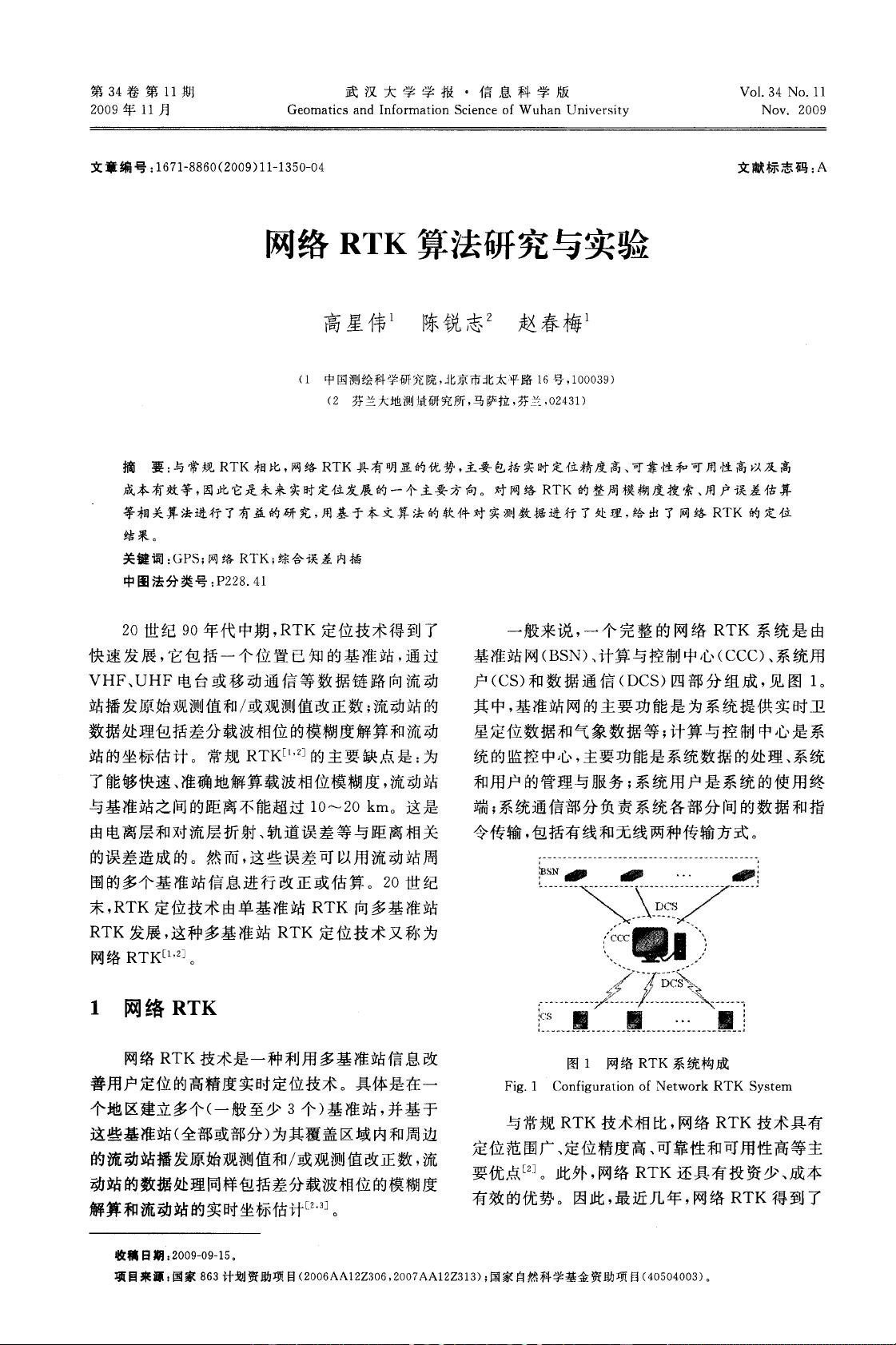
一般来说,一个完整的网络
RTK
系统是由
基准站网
(BSN)
、计算与控制中心
(CCC)
、系统用
户
(CS)
和数据通信
(DCS)
四部分组成,见图
1
。
其中,基准站网的主要功能是为系统提供实时
E
星定位数据和气象数据等;计算与控制中心是系
统的监控中心,主要功能是系统数据的处理、系统
和用户的管理与服务;系统用户是系统的使用终
端;系统通信部分负责系统各部分间的数据和指
令传输,包括有线和无线两种传输方式。
;a
SN
tIIIfJJ
tIIIfJJ蝇l1li':
:('$噩噩…噩:
图
1
网络
RTK
系统构成
Fig. 1 Configuration of Network
RTK
System
与常规
RTK
技术相比,网络
RTK
技术具有
定位范围广、定位精度高、可靠性和可用性高等主
要优点山。此外,网络
RTK
还具有投资少、成本
有效的优势。因此,最近几年,网络
RTK
得到了
项目来源
g
国家
863
计划资助项目
(2006AAI2Z306
,
2007
AAI2Z313);
国家自然科学基金资助项臼
(40504003)
。
下载后可阅读完整内容,剩余3页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-04-27 上传
2021-05-13 上传
2021-09-07 上传
2023-02-23 上传

weixin_38689824
- 粉丝: 6
- 资源: 946
 我的内容管理
展开
我的内容管理
展开







最新资源
- JavaScript实现的高效pomodoro时钟教程
- CMake 3.25.3版本发布:程序员必备构建工具
- 直流无刷电机控制技术项目源码集合
- Ak Kamal电子安全客户端加载器-CRX插件介绍
- 揭露流氓软件:月息背后的秘密
- 京东自动抢购茅台脚本指南:如何设置eid与fp参数
- 动态格式化Matlab轴刻度标签 - ticklabelformat实用教程
- DSTUHack2021后端接口与Go语言实现解析
- CMake 3.25.2版本Linux软件包发布
- Node.js网络数据抓取技术深入解析
- QRSorteios-crx扩展:优化税务文件扫描流程
- 掌握JavaScript中的算法技巧
- Rails+React打造MF员工租房解决方案
- Utsanjan:自学成才的UI/UX设计师与技术博客作者
- CMake 3.25.2版本发布,支持Windows x86_64架构
- AR_RENTAL平台:HTML技术在增强现实领域的应用
