基于PLC的智能交通控制系统设计与模糊控制应用
版权申诉
195 浏览量
更新于2024-07-06
收藏 536KB DOC 举报
"这篇文档是关于基于PLC(可编程逻辑控制器)的智能交通控制系统的设计与实现的外文翻译,由赵亚妮撰写,长安大学出版社出版。论文详细探讨了城市道路交通智能控制技术,特别是针对单交叉路口的控制方法,结合定时控制和模糊控制,以应对非高峰和高峰时期的交通流量变化。"
这篇论文首先介绍了研究背景,包括国内外城市交通信号控制系统的现状,以及基于模糊逻辑的城市交通控制的研究进展。作者指出,传统的交通控制理论和方法对于处理交通系统的非线性和不确定性存在局限,而模糊控制作为一种智能控制方式,能模拟人类思维,有望在城市交通管理中发挥重要作用。
在论文的核心部分,赵亚妮详细阐述了城市交通信号控制的基本参数和评价指标,如车辆延误等。然后,她专注于平面单交叉口的模糊控制器设计,讲解了模糊控制的基本理论,包括智能控制器的控制算法和模糊控制器的具体构建。
论文还涵盖了智能交通控制系统的总体设计,特别是PLC控制系统的设计原则和步骤,以及系统输入输出信号的设定。在这一部分,作者提到了PLC中的关键模块,并讨论了如何在实际应用中结合MATLAB的SIMULINK工具箱和模糊逻辑工具箱进行模糊控制的仿真。此外,还在VB环境下实现了模糊控制算法的程序开发,以增强系统的灵活性和适应性。
通过模糊控制和定时控制的结合,该论文提出的解决方案能够在非高峰时段利用模糊控制优化交通流,而在高峰时段则依赖定时控制以保证交通效率。这种综合策略既发挥了定时控制的稳定性和效率,又弥补了模糊控制在特定条件下可能存在的不足。
这篇论文为智能交通控制提供了新的视角和实用的技术方案,对于交通工程和自动控制领域的研究者以及交通管理实践者都具有很高的参考价值。
位参加协调,称为协调相位。把干线上某一路口作为基准路口,其他各路口的协调相位起
始时刻滞后于基准路口的协调相位起始时间的最小时间差,称为绝对相位差。沿车辆行
驶方向任意相邻路口的协调相位起始时刻的最小时间差,称为相对相位差。
标准车辆单位:
车流中车辆的种类繁多,一般有大型的的、轻型的、重型的等等,不同类型的车辆所
占的道路面积、运行灵活性都不一样,通过停车线所用的时间也会不一样。为了计算信
号的方便,可选择一种类型的车辆作为标准车辆单位,而把其它各种类型车辆按规定的系
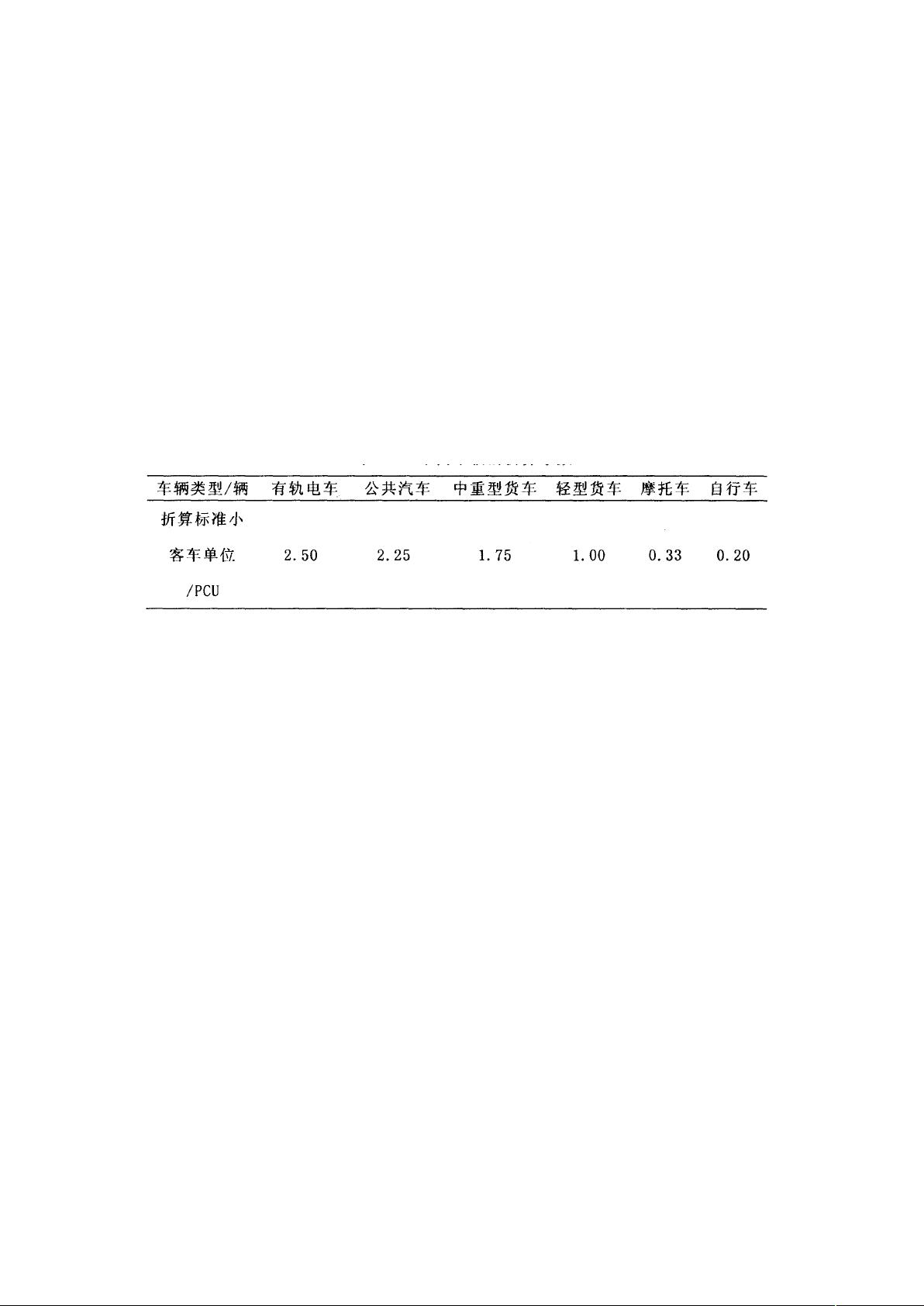
数折算成标准车辆单位。韦伯斯特根据英国的交通状况,提出了采用“折算标准小客车单
位〞作为计算车道饱和流量的标准单位,其建议的不同车辆的折算系数如表1.1所示。
表1.l 不同车辆的折算系数
国内采用的折算系数略有不同。按照国内车辆的分类方法,小客车和微卡车称成为
小型车,而大卡车和拖挂车折算为标准小型车的方法如下:
l辆大型车=1.48PCU,l辆托挂车=2.34PCU
在混合型车道上,当大型车和拖挂车比重小于或等于35%时,小型车根本不受阻滞影
响,那么小型车就视为一辆标准小客车:假设大型车和拖挂车比重大于35%且不大于85%
时,那么每辆小型车折算为1.15辆标准小客车;假设大型车和拖挂车比重大于85%那么
每辆小型车折算1.35辆标准小客车。
2.2 平面交叉口信号控制的评价指标
信号控制下的车辆运动过程及车辆延误
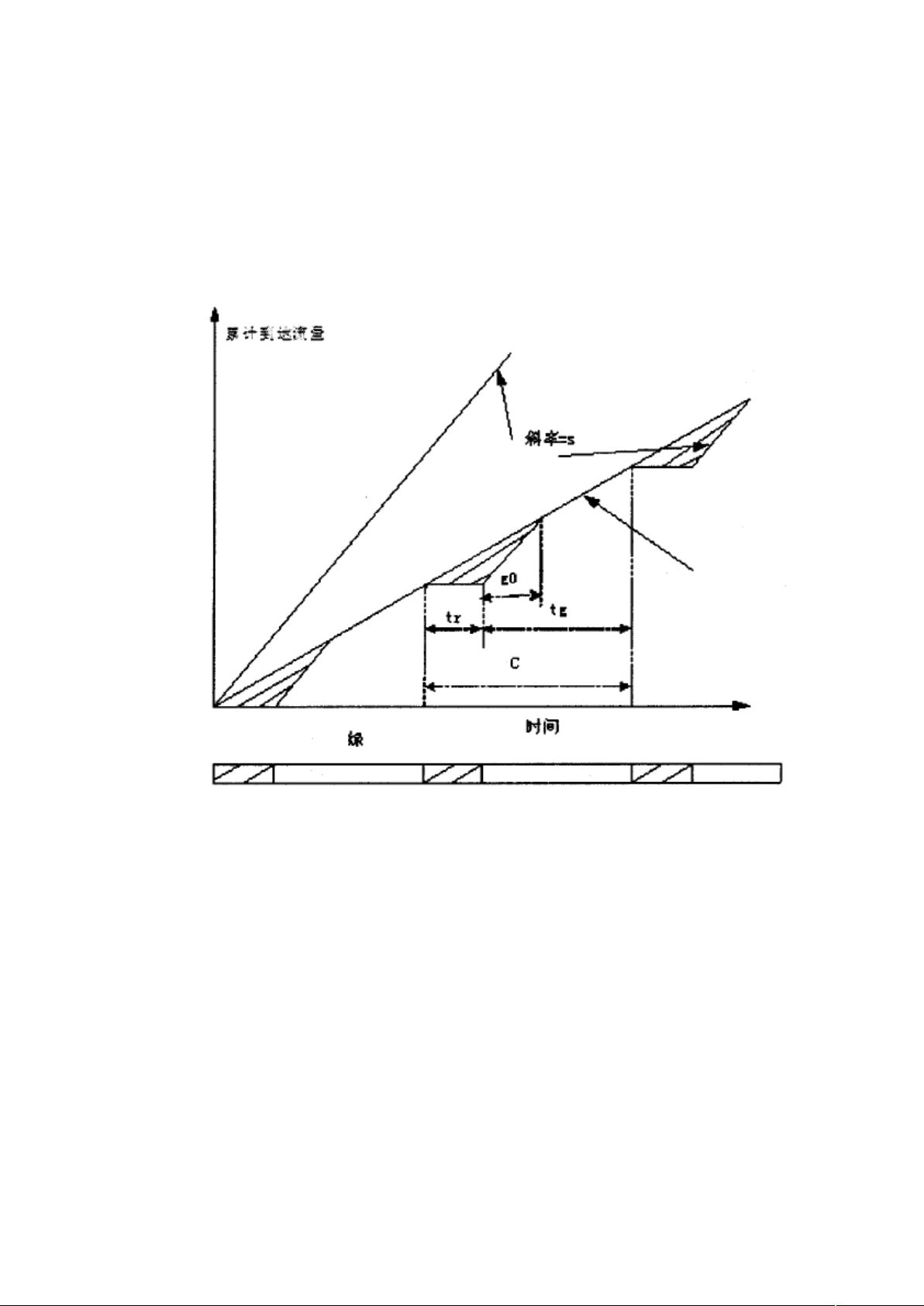
一般来讲,车辆通过交叉路口的延误时间主要受车辆到达率和交叉路口的通行能力
的影响。在交叉路口的通行能力不变的情况下,延误时间主要取决于车辆到达率。为了
分析信号控制下交叉口某一进口道的延误,不妨设车辆的到达率为q(PCU/h),同时设绿灯
期间车辆的驶出率为S(PCU/h)。进口道周期时间可分为绿灯时间tg和红灯时间tr(可理解
为包括黄灯时间和损失时间)。显然周期C=tg+tr,如图l.1所示,描述了车辆到达交叉路口
剩余41页未读,继续阅读
2021-09-24 上传
2021-09-24 上传
2023-07-09 上传
2021-09-29 上传
2021-09-18 上传
2023-06-29 上传
2023-07-08 上传

zpl19880112
- 粉丝: 8
- 资源: 3万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 深入浅出:自定义 Grunt 任务的实践指南
- 网络物理突变工具的多点路径规划实现与分析
- multifeed: 实现多作者间的超核心共享与同步技术
- C++商品交易系统实习项目详细要求
- macOS系统Python模块whl包安装教程
- 掌握fullstackJS:构建React框架与快速开发应用
- React-Purify: 实现React组件纯净方法的工具介绍
- deck.js:构建现代HTML演示的JavaScript库
- nunn:现代C++17实现的机器学习库开源项目
- Python安装包 Acquisition-4.12-cp35-cp35m-win_amd64.whl.zip 使用说明
- Amaranthus-tuberculatus基因组分析脚本集
- Ubuntu 12.04下Realtek RTL8821AE驱动的向后移植指南
- 掌握Jest环境下的最新jsdom功能
- CAGI Toolkit:开源Asterisk PBX的AGI应用开发
- MyDropDemo: 体验QGraphicsView的拖放功能
- 远程FPGA平台上的Quartus II17.1 LCD色块闪烁现象解析
