DeepIM:6D姿态估计的深度迭代匹配技术
62 浏览量
更新于2024-06-20
收藏 1.11MB PDF 举报
"DeepIM是一种深度学习方法,专注于6D姿态估计,通过深度迭代匹配技术提高物体姿态的准确性。该方法利用深度神经网络,在给定初始姿态估计后,通过比较渲染图像与实际观测图像的匹配程度,逐步细化物体的6D姿态。DeepIM采用了解缠结的3D位置和3D方向表示,并在迭代训练过程中优化相对姿态变换预测。在多个基准测试中,DeepIM显示出优于现有方法的性能,甚至能处理未见过的物体。该技术对于机器人操作、虚拟现实等应用具有重要意义,因为它解决了仅依赖RGB图像进行6D姿态估计的挑战,如光照变化、遮挡和物体纹理的影响。传统的解决方案依赖于局部特征匹配,而DeepIM则通过深度学习实现了更高效和精确的匹配。"
在6D姿态估计中,DeepIM的核心在于其深度迭代匹配策略。首先,系统需要一个初始的物体姿态估计,这可以通过其他方法如关键点检测或粗略的深度感知获得。然后,DeepIM的神经网络会生成基于当前估计姿态的3D模型渲染图像。这个渲染图像会与输入的RGB图像进行比较,通过计算两者之间的差异来评估姿态的准确性。
网络设计上,DeepIM采用了特殊的解缠结表示,将3D位置和3D方向分离开来处理,这样有助于网络更好地学习各自的变化规律。在训练过程中,网络不断迭代更新,每次迭代都会预测相对于前一次姿态的微小变换Δpose,从而逐步接近真实物体的6D姿态,公式(1)和(2)展示了这一过程。这种迭代优化策略使DeepIM能够适应复杂的场景变化,比如光照、遮挡等因素。
实验结果证明,DeepIM在两个标准的6D姿态估计数据集上表现优秀,超越了现有的最佳方法。值得注意的是,DeepIM的泛化能力也很强,即使面对训练集中未出现过的物体,也能实现有效的姿态匹配。这对于实际应用来说是一个巨大的优势,因为现实世界中可能会遇到各种未见过的新物体。
DeepIM通过深度学习和迭代匹配技术,为6D姿态估计提供了一个强大且灵活的解决方案,克服了传统方法的一些局限性,尤其是在处理RGB图像时的困难。这一进展对于推动机器人操作、虚拟现实等领域的技术发展具有重大意义。
4
李毅,顾望,纪向阳,于翔,迪特尔
·
福克斯
放大
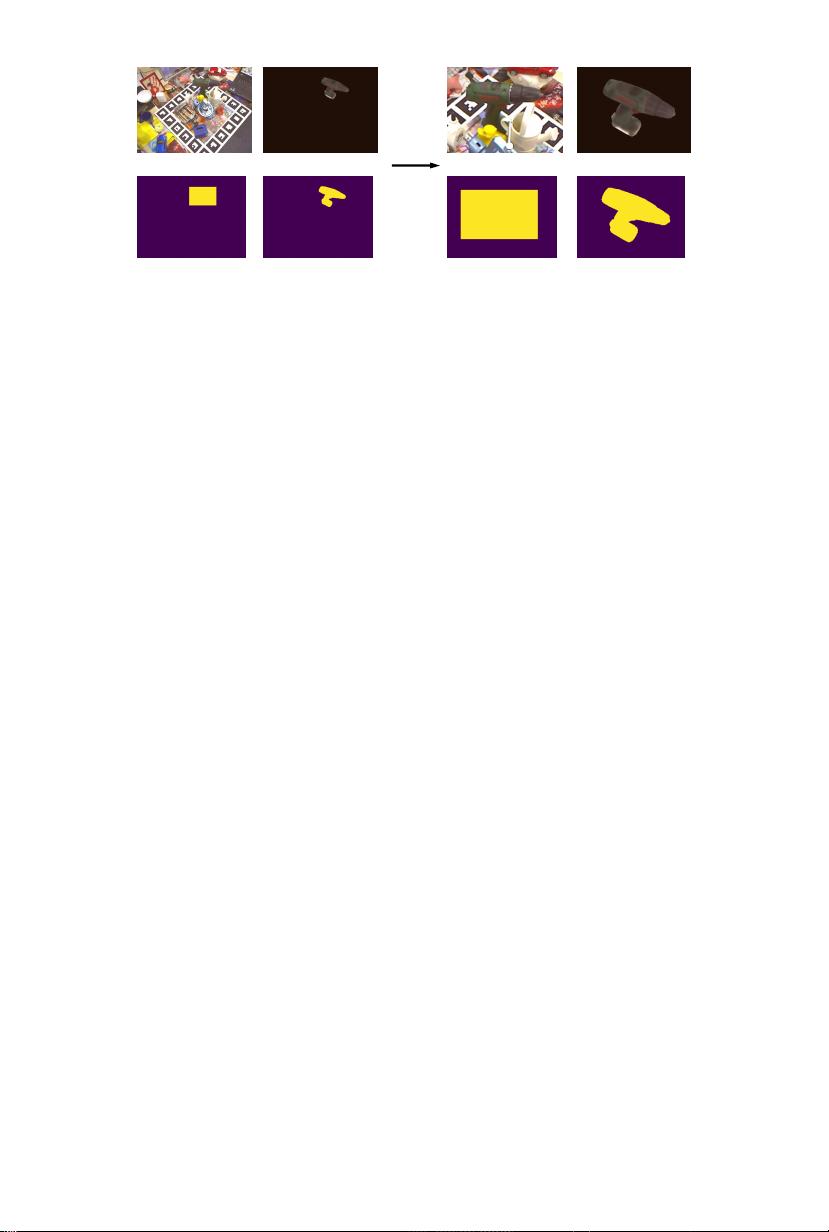
观察/渲染图像
观察/渲染遮罩观察/渲染遮罩
图
2
:
DeepIM
对放大的、上采样的输入图像、渲染图像和两个对象遮罩(在
我们的例子中,放大后为
480
×
640
3
DeepIM框架
在本节中,我们将描述用于
6D
姿态估计的深度迭代匹配网络。给定观察
到的图像和图像中对象的初始姿态估计,我们将网络设计为直接输出可
以应用于初始姿态以改进估计的相对
SE
(
3
)我们首先提出了我们的策
略,放大观察到的图像和渲染图像,用作网络的输入。然后,我们描述
了我们的网络体系结构的姿态匹配。在此之后,我们引入了相对
SE
(
3
)变换的解纠缠表示和用于姿态回归的新的损失函数。最后,我们描
述了我们的程序训练和测试网络。
3.1
高分辨率放大
如果
输入图像中的对象非常小,则可能难以提取用于匹配的有用特征。
为了获得足够的姿态匹配细节,我们在将观察图像和渲染图像馈送到网
络之前放大它们,如图所二、具体地,在迭代匹配的第i阶段中,给定来自
前一步骤的
6D
姿态估计
p
(
i
-1
)
,我们使用根据
p
(
i-1
)查看的
3D
对象模型
来渲染合成图像
。
我们还为观察图像和渲染图像生成一个前景遮罩。根
据观察到的掩模和渲染的掩模,使用放大的边界框裁剪四个图像,其中
我们确保放大的边界框具有与输入图像相同的纵横比,并且以
3D
对象模
型的原点的
2D
投影为中心最后,我们放大并执行双线性上采样
以实现与原始图像相同的大小(在我们的实验中为
480 × 640
)。
重要的是,对象的纵横比在此操作期间不会更改。
3.2
网络结构
图
3
示出了
DeepIM
的网络架构。观察到的图像、渲染图像和两个掩模被
连接成到网络的八通道
tensor
输入(
3
个通道用于观察到的
/
渲染的图像,
1
个通道用于观察到的
剩余16页未读,继续阅读
249 浏览量
839 浏览量
871 浏览量
249 浏览量
336 浏览量
2418 浏览量
222 浏览量
2024-10-15 上传
点击了解资源详情

cpongm
- 粉丝: 5
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- Ps基本功能PPT,附带简单的技巧讲解
- 电脑硬件故障引起系统问题
- 关于LCD的一些知识
- 自动测试 IBM Rational 技术白皮书
- cmake 学习教程
- protues学习教程
- XP下的JDK安装.DOC
- Fedora-10-Installation-Configration-FAQ-Update-1
- Fedora-10-Installaion_Configuration-FAQ
- linux驱动程序设计入门简洁教程
- C与C++中的异常处理
- SCJP 1.6 TestInside真题(中文,台湾人译的)
- 基于单片机控制的自动往返小汽车新设计.pdf
- 中兴公司CDMA原理
- EJB 3 In Action - Manning
- 水晶报表用户指南 9.0
