机器人编程与控制:从动作到理论
需积分: 15 61 浏览量
更新于2024-07-17
收藏 10.68MB DOCX 举报
"《机器人的动作编程与软件开发》是一本深入浅出地介绍机器人动作编程和软件开发的书籍,适合不同层次的机器人爱好者和学习者。书中详细讲解了舵机作为机器人动作执行器的基础知识,图形化界面的使用方法,C语言在机器人编程中的应用,以及机器人控制理论,包括运动控制和稳定性分析。该书得到了多个科研基金和项目的支持,并获得了专家的指导和技术支持。"
在机器人的世界里,动作编程和软件开发是让这些智能实体具备自主行为和智能的关键环节。本书的【标题】"机器人的动作编程与软件开发"揭示了其核心内容,旨在帮助读者理解和掌握这两方面的技能。
【描述】中提到的三个篇章构成了一套完整的机器人编程学习路径。基础篇侧重于舵机,这是机器人执行动作的基础部件,读者将了解到舵机的工作原理、种类和如何通过图形化界面来编排机器人的动作序列,使机器人实现预设的动态表现。
第二篇的提高篇则转向了更深层次的编程,以C语言为工具,介绍了机器人控制的底层编程环境和基础实验例程。C语言因其高效和灵活性,常被用于机器人控制系统,学习这部分内容可以提升读者对机器人控制的精确性和实时性。
第三篇理论篇深入到机器人控制理论,讲解了运动控制和稳定性分析,这是确保机器人能够在各种环境中稳定、准确执行任务的关键。通过学习这部分内容,读者能够理解如何设计和优化机器人的运动策略,以实现更复杂的任务。
【标签】中的"机器人"和"宙斯",表明本书不仅涵盖了广泛的机器人技术,还可能与特定的机器人品牌或技术平台——宙斯机器人有限公司的产品相关联,意味着读者有机会接触到实际的工业级或商业化机器人平台。
本书的定位非常明确,无论是初次接触机器人还是有一定基础的读者,都能从中受益。对于初学者,它提供了一个从零开始学习机器人动作编程的系统框架;对于有经验的读者,它深化了对机器人控制的理解,提供了进阶实践的指导。
最后,本书的编写得益于多方面的科研支持,以及专家和企业的合作,确保了内容的科学性和实用性。结合其姊妹书《机器人的硬件组装与结构设计》,这套书籍成为了一个全面的机器人学习资源,适合作为学校教学和机器人竞赛的教材。
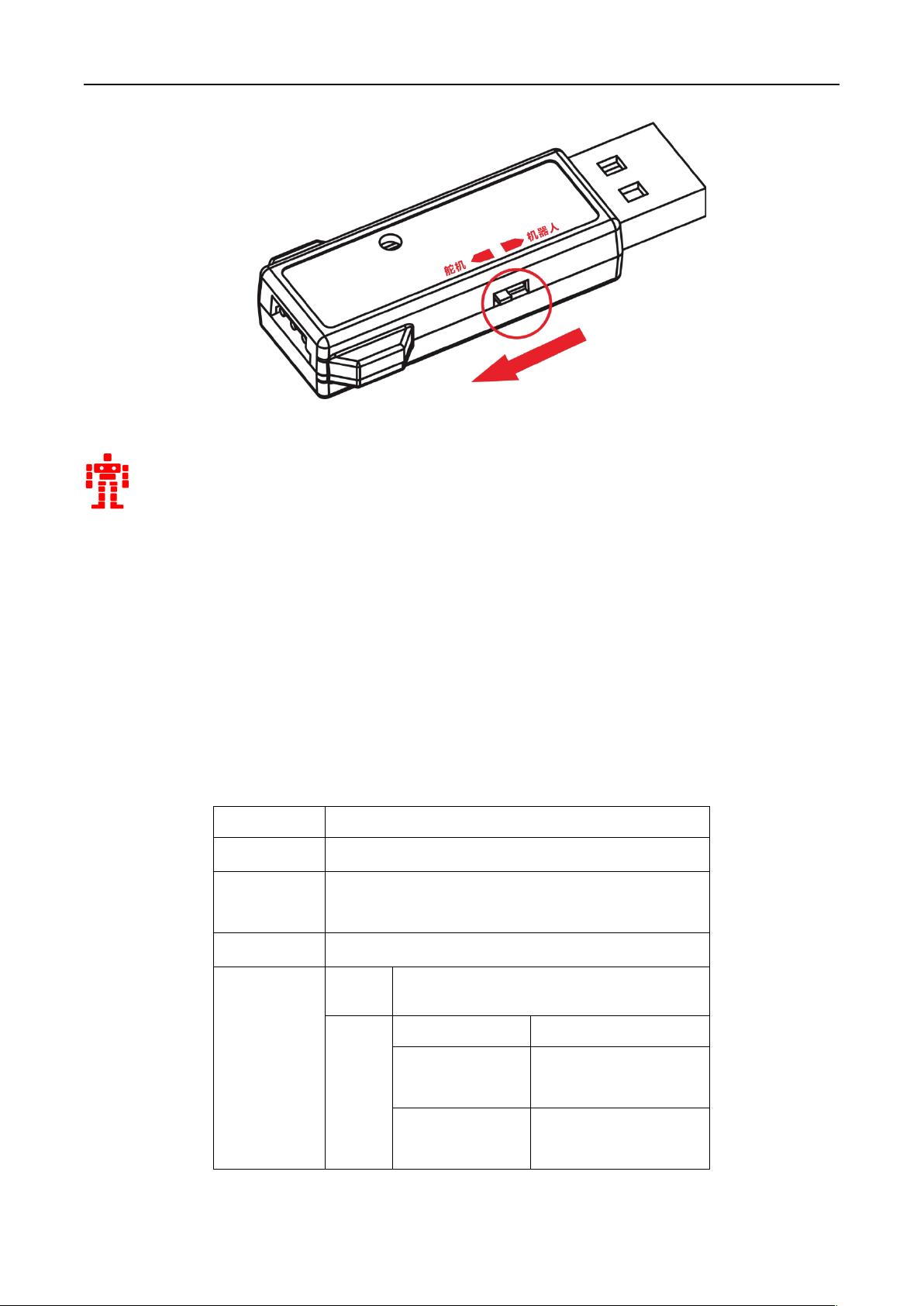
【电流门限】设置电流阈值。如果检测到舵机板中的电流高于设定的电流值,则舵机工作功
率降低。当电流下降到低于阈值时恢复先前功率。
[设置范围]:逆向 (低) 0~63 (高)
正向 (低) 64~127 (高),初始值为 20
【初始位置】输出轴的默认初始位置的偏差值,可以按用户的要求设置。
[设置范围]:(倒退)-127~127(向前);初始值为 0
11

剩余63页未读,继续阅读
2021-08-14 上传
2024-10-16 上传
2024-10-16 上传
2024-10-16 上传

秋天伊人
- 粉丝: 1
- 资源: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- WPF渲染层字符绘制原理探究及源代码解析
- 海康精简版监控软件:iVMS4200Lite版发布
- 自动化脚本在lspci-TV的应用介绍
- Chrome 81版本稳定版及匹配的chromedriver下载
- 深入解析Python推荐引擎与自然语言处理
- MATLAB数学建模算法程序包及案例数据
- Springboot人力资源管理系统:设计与功能
- STM32F4系列微控制器开发全面参考指南
- Python实现人脸识别的机器学习流程
- 基于STM32F103C8T6的HLW8032电量采集与解析方案
- Node.js高效MySQL驱动程序:mysqljs/mysql特性和配置
- 基于Python和大数据技术的电影推荐系统设计与实现
- 为ripro主题添加Live2D看板娘的后端资源教程
- 2022版PowerToys Everything插件升级,稳定运行无报错
- Map简易斗地主游戏实现方法介绍
- SJTU ICS Lab6 实验报告解析
