
基于基于FPGA的速度和位置测量板卡的设计与实现的速度和位置测量板卡的设计与实现
针对增量式光电编码器经典速度测量算法M/T法低速采样时间过长和位置测量算法精度不高的问题,本文基于定
采样周期M/T法设计实现了速度和位置测量板卡。采用Xilinx公司的XC3S400 FPGA为控制芯片进行设计,并设
计PC104总线接口实现板卡与控制器的数据通信。该板卡接收处理光电编码器的反馈脉冲得到速度和位置参
数,将数据通过PC104总线接口传递给控制器。实验表明,板卡的采样时间达到1ms,并且位置测量精度可达
5&mes;10-5。增量式光电编码器作为速度和位置传感器被广泛应用于伺服系统。理论上,光电编码器反馈脉冲
的频率对应被测轴转速,反馈脉冲个数的累加值对应位置信息。经典的速度测量方法有M
针对增量式光电编码器经典速度测量算法M/T法低速采样时间过长和位置测量算法精度不高的问题,本文基于定采样周期
M/T法设计实现了速度和位置测量板卡。采用Xilinx公司的XC3S400 FPGA为控制芯片进行设计,并设计PC104总线接口实现
板卡与控制器的数据通信。该板卡接收处理光电编码器的反馈脉冲得到速度和位置参数,将数据通过PC104总线接口传递给
控制器。实验表明,板卡的采样时间达到1ms,并且位置测量精度可达5&mes;10-5。
增量式光电编码器作为速度和位置传感器被广泛应用于伺服系统。理论上,光电编码器反馈脉冲的频率对应被测轴转速,
反馈脉冲个数的累加值对应位置信息。经典的速度测量方法有M法、T法和M/T法3种:其中M法通过计取固定时间间隔内光电
编码器的反馈脉冲数计算当前转速,适用于高速场合;T法利用高频脉冲测量相邻反馈脉冲的时间间隔计算当前转速,适用于低
速场合;M/T法不仅测量固定时间间隔内反馈脉冲的增量值,而且计数该时间内的高频脉冲数。虽然M/T法克服了M法和T法测
速范围有限的缺点,在高速和低速段都具有较高的分辨率及较低的测速误差,但是存在低速采样时间过长等问题。经典的位置
测量方法按转向的正负对反馈脉冲进行增减计数,然后将计数值乘以脉冲当量K得到当前位置信息,可见其测量精度取决于脉
冲当量。
本文以定采样周期M/T法为基础,它解决了经典M/T法低速检测时间过长的问题,保证每一固定周期都能采样到数据。此
外,该算法充分利用反馈脉冲的位置信息和时间信息,得到了比一个脉冲当量K更为的位置信息。本文利用FPGA设计实现定
采样周期M/T法,并设计PC104总线接口满足板卡与控制器数据通信的要求。
1 总体方案总体方案
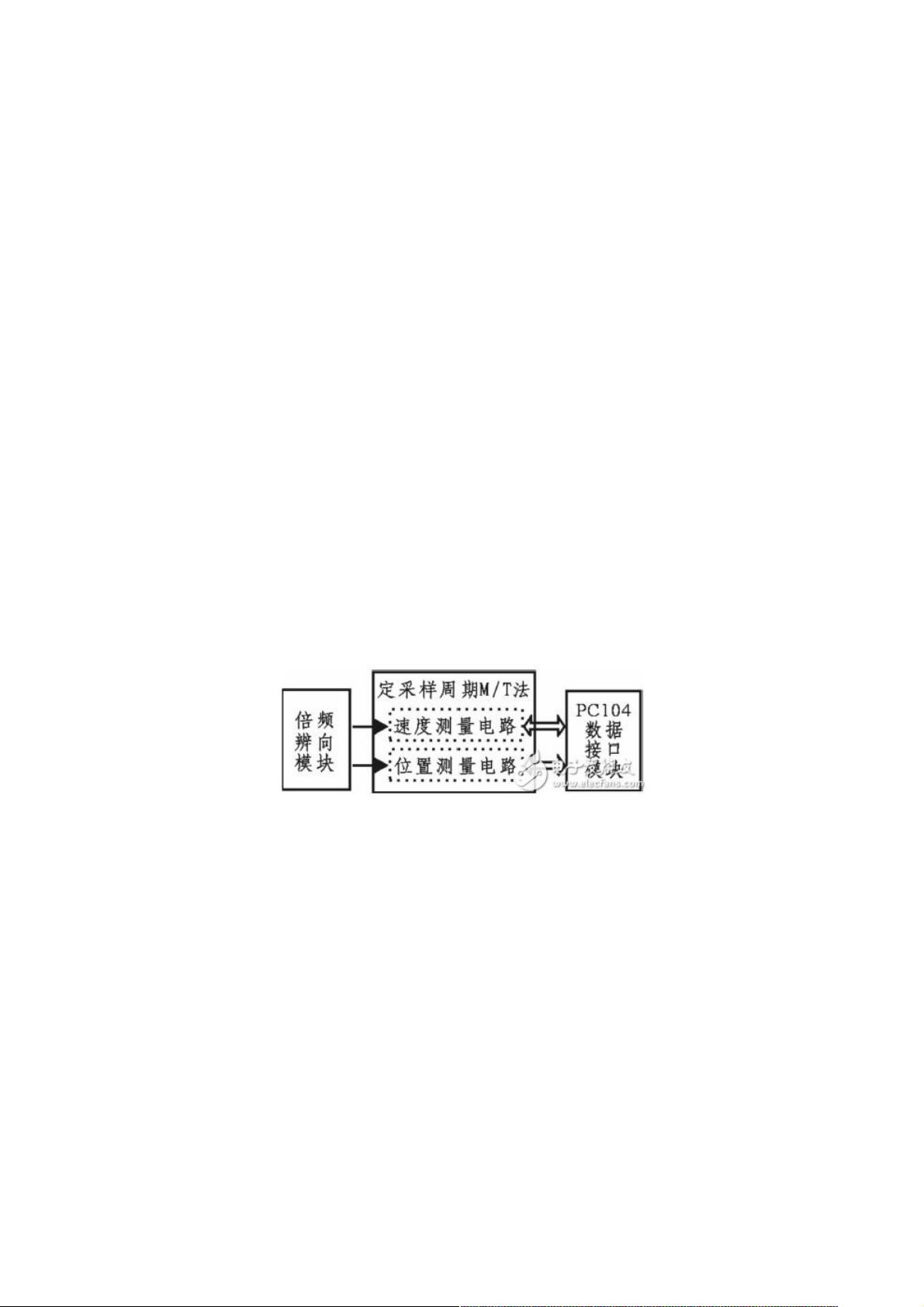
速度和位置测量板卡接收光电编码器的反馈脉冲信号,通过差分电路将其转换为单端信号消除共模干扰,然后在FPGA中
对脉冲处理得到速度和位置参数,将参数通过PC104数据接口传递给控制器。速度和位置测量板卡除差分电路以外的功能均
通过FPGA设计实现(如图1所示),因此FPGA是本板卡的芯片。速度和位置测量板卡主要包括倍频辨向模块、定采样周期M/T
法模块和PC104数据接口模块。
图图1: FPGA结构框图结构框图
1. 1 倍频辨向模块倍频辨向模块
光电编码器的输出反馈脉冲包括相位差90°的A、B信号以及零位脉冲Z。A、B之间的相位关系标志被测轴的转向,即A相超
前B相90°表示正转,滞后90°表示反转;Z脉冲起到参考零点的作用。一个周期内A、B两路信号的相对位置变换了4次,即正转
A、B按00-10-11-01循环输出,反转遵循00-01-11-10的规律。倍频辨向模块通过检测A、B信号的状态变化输出四倍频及方向
信号,不仅提高了速度和位置测量的精度,还起到抗干扰的作用。
1.2 定采样周期定采样周期M/T法模块法模块
定采样周期M/T法模块分为速度测量电路和位置测量电路两部分,图2给出了该算法的硬件原理及时序图。定采样周期M/T
法对高频脉冲fc两级锁存的设计确保实际检测起始点Tk超前于采样周期Tn,这解决了M/T法在低速时检测时间过长的问题,保
证每个采样周期内都能成功采集到数据。
下载后可阅读完整内容,剩余3页未读,立即下载

weixin_38570406
- 粉丝: 9
- 资源: 951
 我的内容管理
展开
我的内容管理
展开







最新资源
- Flex垃圾回收与内存管理:防止内存泄露
- Python编程规范与最佳实践
- EJB3入门:实战教程与核心概念详解
- Python指南v2.6简体中文版——入门教程
- ANSYS单元类型详解:从Link1到Link11
- 深度解析C语言特性与实践应用
- Gentoo Linux安装与使用全面指南
- 牛津词典txt版:信息技术领域的便捷电子书
- VC++基础教程:从入门到精通
- CTO与程序员职业规划:能力提升与路径指南
- Google开放手机联盟与Android开发教程
- 探索Android触屏界面开发:从入门到设计原则
- Ajax实战:从理论到实践
- 探索Android应用开发:从入门到精通
- LM317T稳压管详解:1.5A可调输出,过载保护
- C语言实现SOCKET文件传输简单教程
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


