ROS TEB算法详解:动态约束下的路径优化与参数配置
版权申诉
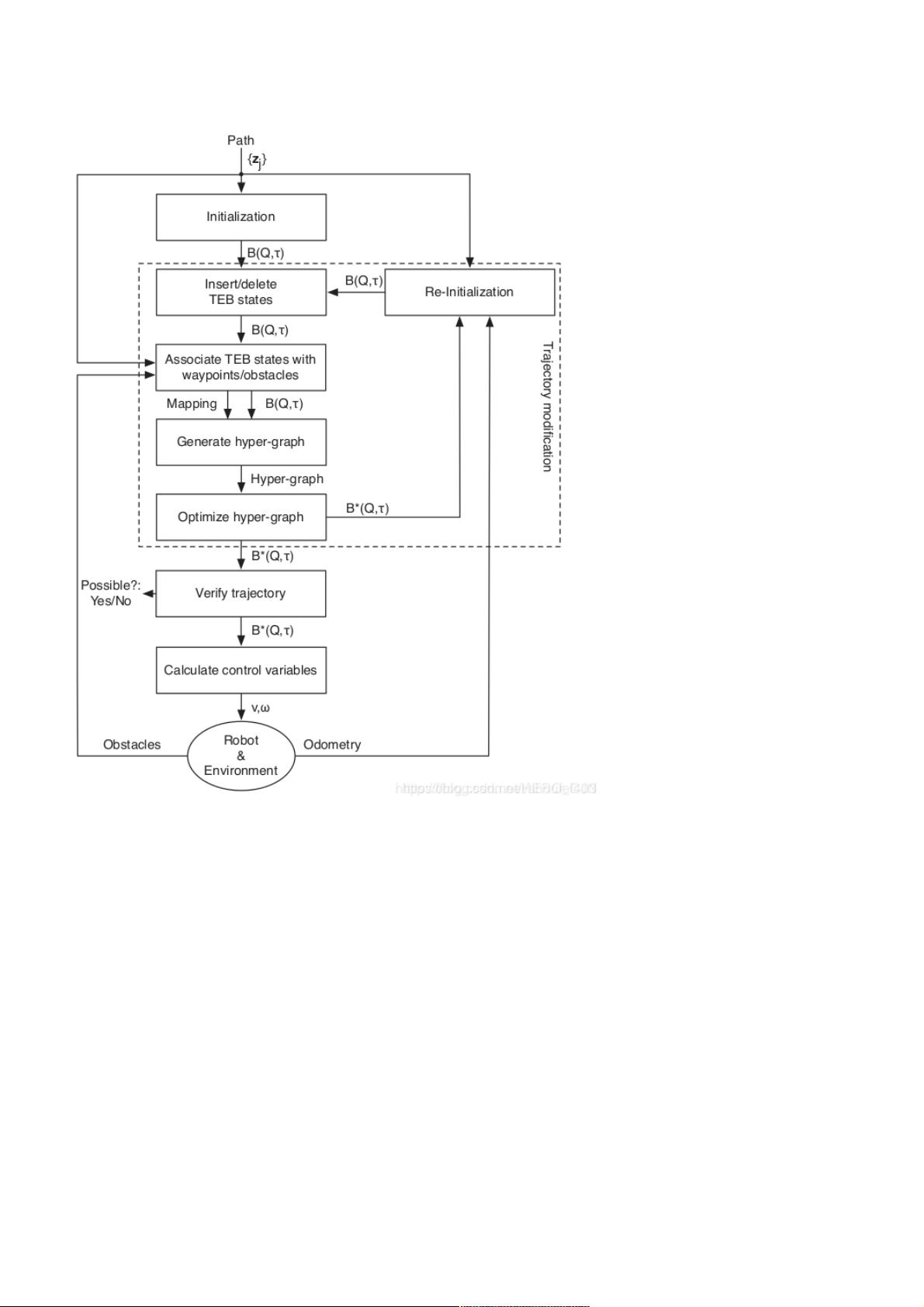
本文主要介绍了ROS局部运动规划器Teb(Time-Evolving Behavior)的基本概念、工作原理和与DWA(Dynamic Window Approach)算法的比较。Teb算法的核心在于考虑自主机器人动态约束的轨迹修改,它在规划过程中能够实时调整机器人的位姿朝向,以便更高效地接近目标,避免不必要的后退和碰撞风险。
算法原理部分,参考了博文《Trajectory modification considering dynamic constraints of autonomous robots》,强调了Teb在处理动态环境中如何寻找最优路径。与DWA相比,Teb的优势在于能更好地适应到达目标点后的朝向调整,减少了对两轮差速底盘的不流畅运动,但这也意味着在某些特定情况下,如狭窄空间或避免碰撞,DWA的原地旋转策略可能更为适用。
Teb算法的关键参数包括:
1. enable_homotopy_class_planning:此参数决定了规划是否考虑路径的拓扑连续性。如果设置为False,可能会导致局部路径陷入最小值,因为优先选择避开障碍物,即使这意味着路径总长度增加。而开启此功能(True),则会搜索多个可能路径并选择最安全和高效的。
2. global_plan_overwrite_orientation:此参数影响局部路径与全局路径的方向一致性。当设置为True时,TEB会覆盖全局路径的指向,以便根据实际需要调整机器人运动方式;反之,若设置为False,TEB将遵循全局路径的方向。
文章还提到了HomotopyClassPlanner类,这是Teb中的一个重要组成部分,它负责处理路径的拓扑连续性和方向优化。不同场景下,如Forward模式适用于大部分开阔空间,而在狭窄区域或目标位于正后方的情况,Backward模式可能更合适。
了解和优化Teb参数对于实现高效的机器人局部运动规划至关重要,尤其是在复杂的动态环境和多种运动模式需求的场景中。通过灵活调整这些参数,可以显著提高机器人的运动效率和安全性。
对对ROS局部运动规划器局部运动规划器Teb的理解的理解
TEB算法过程算法过程
算法原理方面可参考下面的博文:
《Trajectory modification considering dynamic constraints of autonomous robots》理解
TEB与与DWA对比:对比:
teb在运动过程中会调整自己的位姿朝向,当到达目标点时,通常机器人的朝向也是目标朝向而不需要旋转。dwa则是先到达目标坐标
点,然后原地旋转到目标朝向。对于两轮差速底盘,teb在运动中调节朝向会使运动路径不流畅,在启动和将到达目标点时出现不必要
的后退。这在某些应用场景里是不允许的。因为后退可能会碰到障碍物。而原地旋转到合适的朝向再径直走开是更为合适的运动策略。
这也是teb需要根据场景要优化的地方。
下载后可阅读完整内容,剩余5页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2023-10-31 上传
2018-11-21 上传
2021-09-29 上传
2021-04-28 上传
2023-05-17 上传
2022-04-15 上传

weixin_38682406
- 粉丝: 5
- 资源: 910
 我的内容管理
展开
我的内容管理
展开







最新资源
- MATLAB实现小波阈值去噪:Visushrink硬软算法对比
- 易语言实现画板图像缩放功能教程
- 大模型推荐系统: 优化算法与模型压缩技术
- Stancy: 静态文件驱动的简单RESTful API与前端框架集成
- 掌握Java全文搜索:深入Apache Lucene开源系统
- 19计应19田超的Python7-1试题整理
- 易语言实现多线程网络时间同步源码解析
- 人工智能大模型学习与实践指南
- 掌握Markdown:从基础到高级技巧解析
- JS-PizzaStore: JS应用程序模拟披萨递送服务
- CAMV开源XML编辑器:编辑、验证、设计及架构工具集
- 医学免疫学情景化自动生成考题系统
- 易语言实现多语言界面编程教程
- MATLAB实现16种回归算法在数据挖掘中的应用
- ***内容构建指南:深入HTML与LaTeX
- Python实现维基百科“历史上的今天”数据抓取教程
