国产水中兵器捷联惯导传递对准问题解析与建议
需积分: 10 53 浏览量
更新于2024-08-11
2
收藏 1004KB PDF 举报
"水中兵器捷联惯导传递对准分析 (2013年) - 孔德永 - 武器装备理论与技术 - 四川兵工学报"
这篇论文主要探讨了国产水中兵器在使用过程中遇到的两个关键问题,这些问题与捷联惯导系统的传递对准过程有关。捷联惯导系统( Strapdown Inertial Navigation System, SINS)是现代水中兵器导航的重要组成部分,它通过连续地测量载体的加速度和角速度来确定位置、姿态和速度。
论文首先介绍了传递对准的功能,这是惯性导航系统初始化的重要步骤,旨在校准惯性传感器的初始误差,确保导航数据的准确性和可靠性。传递对准涉及对准数据的处理,包括传感器读数、环境参数等,这些数据用于计算和校正惯导系统的初始误差。
接着,论文详细阐述了传递对准的过程,分为多个阶段,可能包括预对准、粗对准和精对准等。每个阶段都有其特定的目标和方法,例如预对准通常利用已知位置信息进行,而粗对准和精对准则依赖于更复杂的算法和数据处理。
在分析过程中,论文列出了对准的考核指标,这些指标衡量了对准效果的优劣,可能包括对准精度、稳定时间和对准误差等。此外,论文还讨论了传递对准开始的时间选择,以及对发射平台的特殊要求,如平台的稳定性、运动模式和对准期间的环境条件。
文中指出,这两个突出问题是由于对准过程中某些环节的不足或不适应造成的。通过对这些问题的深入分析,作者提出了针对性的修改建议,可能包括改进对准算法、优化数据处理流程、调整对准时机,以及强化发射平台的稳定性控制。
最后,论文强调了改进传递对准过程对于提升水中兵器导航性能和任务执行效率的重要性。通过实施这些建议,可以预期解决当前的问题,提高国产水中兵器的作战能力和可靠性。
总结来说,这篇论文对水中兵器捷联惯导系统的传递对准进行了深入研究,揭示了实际操作中可能遇到的问题,并提供了改进方案,对于我国水中兵器技术的发展具有一定的指导意义。
第 34卷 第 3期 四 川 兵 工 学 报 2013年 3
月
收稿日期:2012-12-11
作者简介:孔德永(1975—),男,博士,讲师,主要从事系统仿真、控制系统设计研究。
【武器装备理论与技术】 doi:10.11809/scbgxb2013.03.003
水中兵器捷联惯导传递对准分析
孔德永
(湖北经济学院 电子工程系,武汉 430205)
摘要:针对国产水中兵器使用过程中出现的 2个突出问题,通过分析捷联惯导系统的传递对准过程,包括对准的功
能、数据、过程、阶段、结果、考核指标、开始时间以及对发射平台的要求,找到了产生这 2个问题的原因,并对水中兵
器的传递对准过程给出了修改建议。
关键词:捷联惯导;传递对准;水中兵器
中图分类号:V249.32 文献标识码:A 文章编号:1006-0707(2013)03-0008-04
TransferAlignmentAnalysisofStrapdownInertial
NavigationSystem forUnderwaterWeapon
KONGDeyong
(DepartmentofElectronicEngineering,HubeiUniversityofEconomics,Wuhan430205,China)
Abstract:Forthetwooutstandingproblemsduringtheuseofsomehomemadeunderwaterweapons,
throughtheanalysisoftheprocessofthetransferalignmentfortheStrapdownInertialNavigationSystem
(SINS),includingthefunction,data,detail,phases,theindexforexamination,startingtimeandthere
quirementforlaunchplatform,thearticleexplainsthereasonfortheproblems,andgivesthemodification
adviceforthetransferalignmentoftheunderwaterweapon.
Keywords:StrapdownInertialNavigationSystem;transferalignment;underwaterweapon
目前,捷联式惯导广泛应用在我国各型的水中兵器(包
括鱼雷、水雷、水下航行器)上,但是在水中兵器的使用过程
中存在 2个突出问题:
①
射前准备过程中如果传递对准(惯
导调平)失败,需要对水中兵器断电,等待 10~15min后重
新上电,重新进行射前准备;
②
在传递对准完成后如果 20
min左右没有发射水中兵器,则仍需要对水中兵器断电,等
待 10~15min后重新上电,重新进行射前准备。对于态势瞬
时变化的战场来说,1分钟乃至几秒钟的时间都决定着 1艘
水平舰船或潜艇(对于水中兵器来说为发射平台)的存亡。
要分析和解决这 2个问题,就需要对水中兵器捷联式惯性导
航系统(简称捷联惯导系统)传递对准的工作原理及过程进
行详细分析。
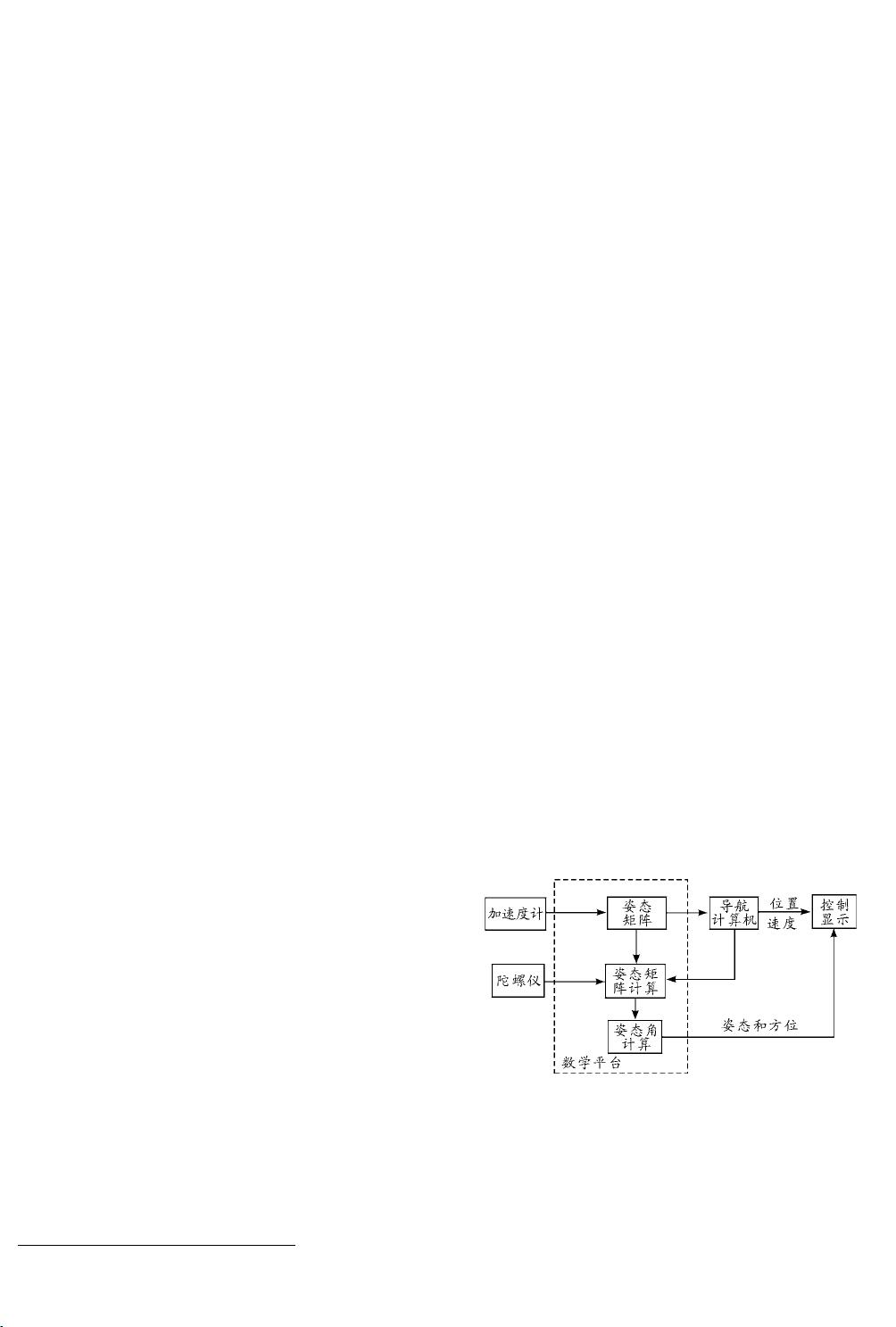
捷联式惯导系统将陀螺仪、加速度计构成的惯性测量单
元(inertialmeasurementunit,IMU)直接与载体固联,其测量
得到的载体角运动和线运动参数是沿与载体固联的坐标轴
上的分量。导航计算机通过计算“姿态矩阵”将加速度信息
转换到惯性坐标系或当地地理坐标系中,从而实现“数字平
台”,然后再进行速度位置计算,见图 1。
图 1 捷联式惯性导航系统原理框图
1 捷联惯导系统的基本原理
水中兵器大都采用捷联式惯性导航系统,这种导航系统
下载后可阅读完整内容,剩余3页未读,立即下载
2021-04-28 上传
2021-05-15 上传
2021-05-24 上传
2021-05-12 上传
2021-06-12 上传
2021-05-18 上传
2021-05-24 上传
2021-05-09 上传

冷月鱼
- 粉丝: 294
- 资源: 944
 我的内容管理
展开
我的内容管理
展开







最新资源
- shaynelarocque.github.io:shaynelarocque.github.io
- find_unused_open_ports
- 【WordPress插件】2022年最新版完整功能demo+插件2.2.1.zip
- Data-Science-IIHT:IIHT数据科学日志和工作表
- DOTween Pro v0.9.290.zip
- Club-management
- stinedeck:使用Flask,Python,MongoDB和Javascript jQuery创建的数字抽认卡应用程序
- PhotoshootMap
- WheelPicker:轮选择器
- spring-2021-work-Blua2:GitHub Classroom创建的spring-2021-work-Blua2
- Lucille MPD client:音乐播放器守护程序的客户端-开源
- micr1
- simple-cv
- 分数阶傅里叶变换.zip
- ci-app
- Entity_Resolution_Service_Intermediary_OSGi
