球坐标工业机械手设计:CAD图纸详解与控制系统集成
18 浏览量
更新于2024-06-24
收藏 3.19MB DOC 举报
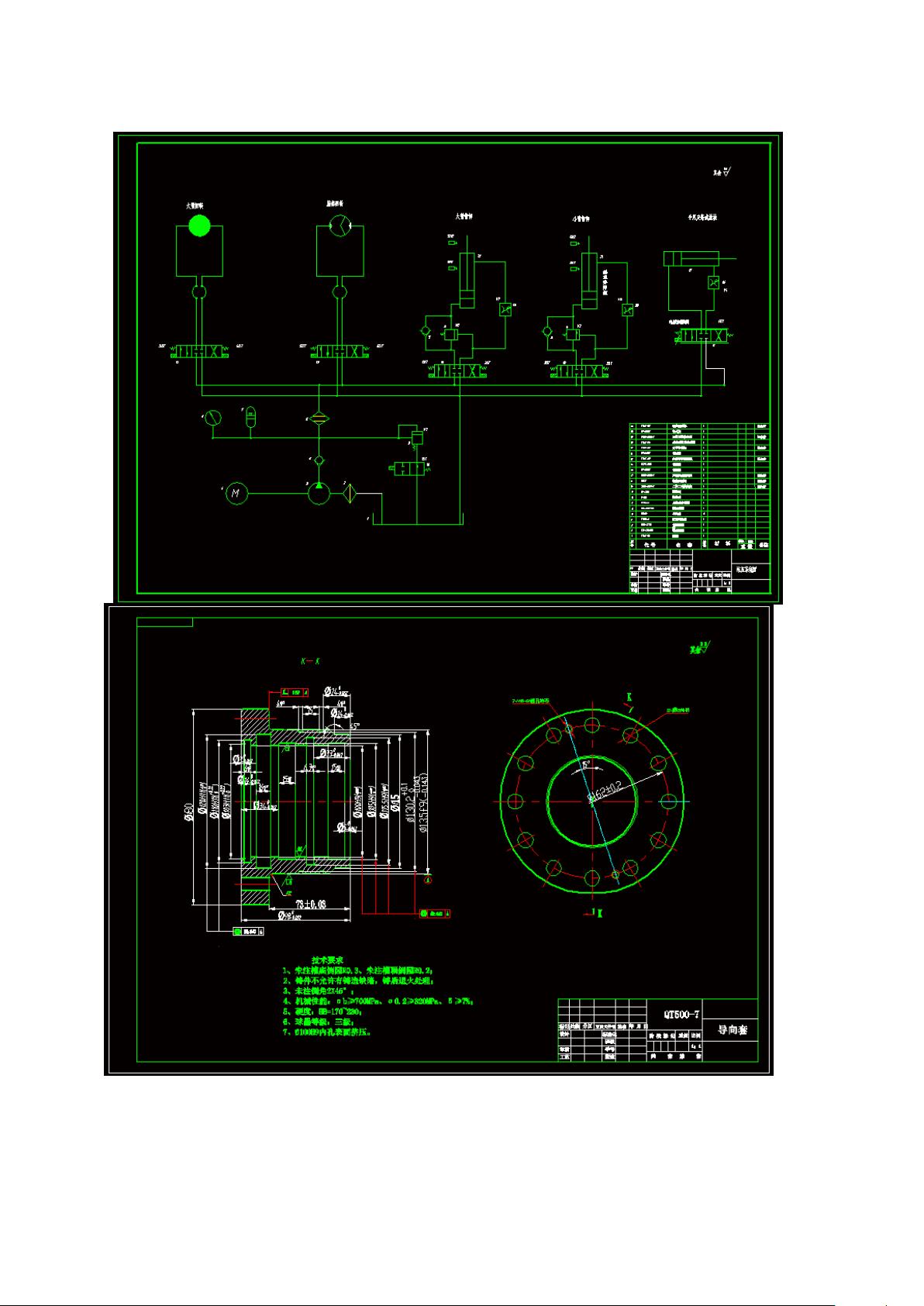
本文档详细介绍了球坐标工业机械手的设计,这是一种在现代机械制造中广泛应用的自动化设备。设计的机械手主要特点是采用球坐标结构,其手臂动作包括摆动和转动,手爪具有伸缩和抓取功能,特别适合处理不同尺寸和形状的棒料,如直径在φ40~φ60mm,长度450~1200mm的棒料。这种机械手对于提高生产效率,减轻人工负担有着显著作用。
首先,作者阐述了工业机械手的基本概念,它是自动化领域的前沿技术,将机械工程、电子技术和计算机科学等多个学科紧密融合,是高技术发展的热点。工业机械手的核心功能在于根据预设程序自动完成物料搬运和操作任务,尤其在重复性和精确性方面表现出色,能替代人工完成繁重或精细的操作。
本文着重讨论了球坐标机械手的构成和分类,以及其自由度和坐标型式的确定。自由度的合理设计确保了机械手的灵活性和适应性,而球坐标型式则提供了广泛的活动范围,使得机械手能够在三维空间内灵活作业。液压技术在机械手中的应用被详细分析,它提供动力支持和精确控制,保证了机械手动作的平稳和高效。
此外,文档还探讨了可编程逻辑控制器(PLC)在机械手控制系统中的重要作用。PLC的选择与配置基于机械手的工作流程,通过顺序功能图和梯形图的形式展示了其控制策略,确保了机械手按照预设指令准确执行任务。编程语言的使用不仅实现了机械手的智能化,还提高了系统的可靠性和维护性。
最后,关键词“机械手”、“球坐标工业机械手”、“抓取”、“棒料”、“液压”和“PLC”揭示了本文的核心研究内容,表明设计者不仅关注机械手的硬件结构,还关注到其核心技术的应用和当前行业的动态。通过这套CAD图纸,读者可以了解到球坐标工业机械手从理论设计到实际应用的全过程,对于机械工程、自动化控制以及制造业相关人员具有很高的参考价值。

2024-09-21 上传
2024-10-27 上传
2024-10-27 上传
2024-07-02 上传
2023-08-08 上传
2023-05-30 上传
2023-06-19 上传

黑色的迷迭香
- 粉丝: 783
- 资源: 4万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 深入浅出:自定义 Grunt 任务的实践指南
- 网络物理突变工具的多点路径规划实现与分析
- multifeed: 实现多作者间的超核心共享与同步技术
- C++商品交易系统实习项目详细要求
- macOS系统Python模块whl包安装教程
- 掌握fullstackJS:构建React框架与快速开发应用
- React-Purify: 实现React组件纯净方法的工具介绍
- deck.js:构建现代HTML演示的JavaScript库
- nunn:现代C++17实现的机器学习库开源项目
- Python安装包 Acquisition-4.12-cp35-cp35m-win_amd64.whl.zip 使用说明
- Amaranthus-tuberculatus基因组分析脚本集
- Ubuntu 12.04下Realtek RTL8821AE驱动的向后移植指南
- 掌握Jest环境下的最新jsdom功能
- CAGI Toolkit:开源Asterisk PBX的AGI应用开发
- MyDropDemo: 体验QGraphicsView的拖放功能
- 远程FPGA平台上的Quartus II17.1 LCD色块闪烁现象解析
