平头哥CDK与中科昊芯:永磁电机双闭环FOC控制技术解析
需积分: 0 94 浏览量
更新于2024-08-05
收藏 299KB PDF 举报
"平头哥CDK助力中科昊芯HX2000系列芯片之双电机有感FOC控制系统专题(三)永磁电机双闭1"
这篇内容详细介绍了平头哥半导体有限公司的CDK(剑池集成开发环境)在帮助开发者实现中科昊芯HX2000系列芯片上的双电机有感FOC控制系统的应用。具体到本次专题的第三部分,重点是讲解了永磁电机的双闭环调速系统,尤其关注了内置霍尔位置传感器的BLDC(无刷直流电机)控制。
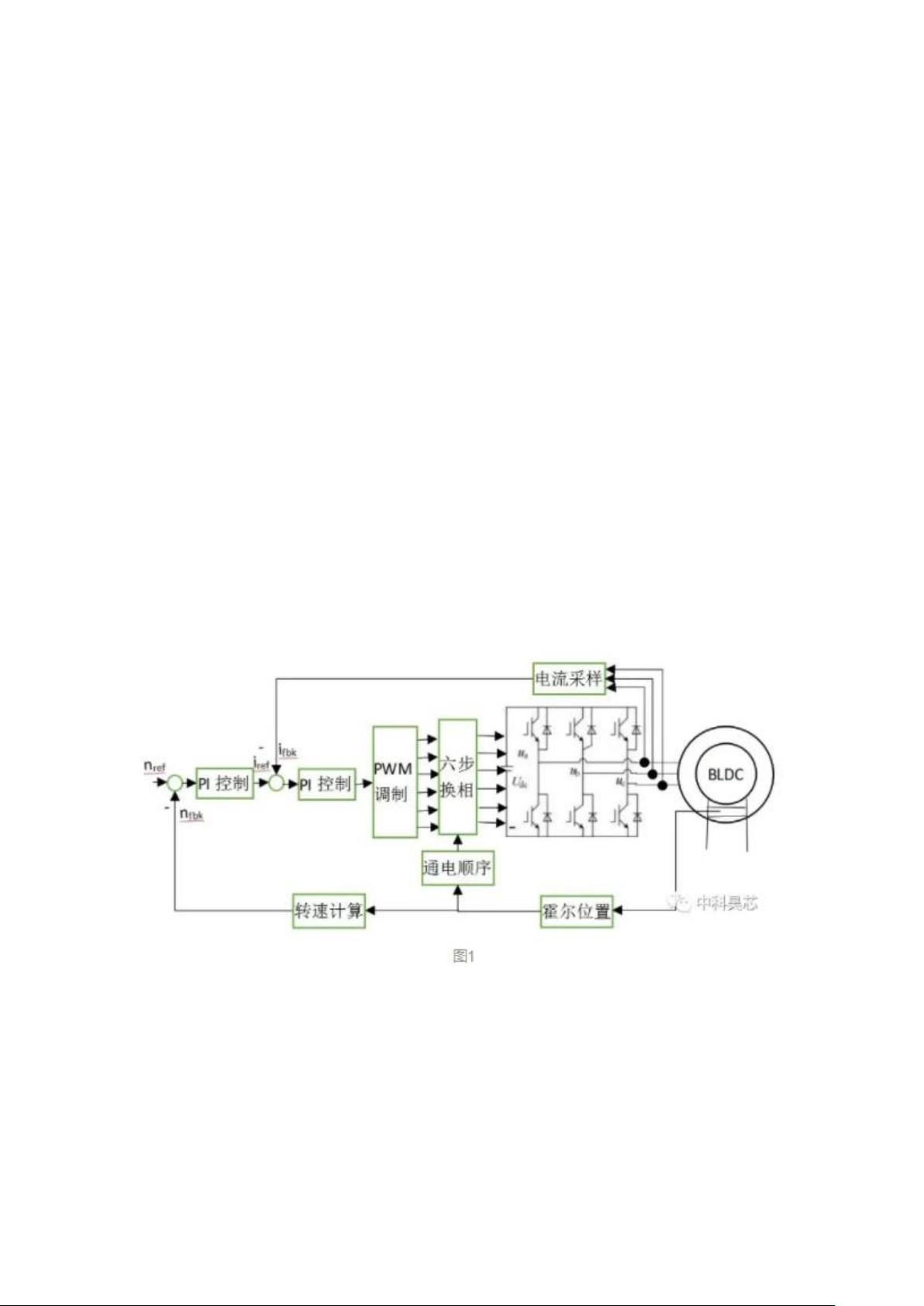
首先,双闭环调速原理是基于速度和电流两个反馈回路。系统设定的参考转速(nref)与通过霍尔传感器每隔60度换相时间间隔计算出的实际转速(nfbk)进行比较。这个比较结果经过速度PI(比例积分)调节器处理,产生电流给定值(iref)。接着,电流给定值与电流采样反馈值(ifbk)再进行比较,通过电流PI调节器输出调制波信号,结合PWM(脉宽调制)模块的三角波信号,形成调制后的脉宽信号,以此驱动逆变器进行六步换相,从而实现对电机速度的精确控制。
设计中采用的硬件平台是CDK-V2.10.3版本和AioneMotor_DSC28034电机驱控一体板,其优点在于实现方式简单且成本较低。然而,相比于采用FOC(磁场定向控制)的系统,这种方法可能导致更大的转矩脉动。
系统结构方面,HXS320F28034永磁电机的双闭环控制系统通过GPIO按键控制电机的启动和转速设定,双闭环PI调节输出的PWM波的导通脉宽,进而实现电机速度调节。硬件连接细节在图3中呈现,而软件开发环境和硬件配置的详细介绍可以在前一期内容中找到。
开发过程中,代码主要包括:设置PWM的GPIO引脚、配置三路三相PWM波输出、霍尔位置采样和转速计算、电流采样、PI调节算法以及基于六步换相的EPWM事件触发中断服务程序。其中,`speed_cal`函数展示了霍尔位置采样和转速计算的代码段,用于计算两个换相点间的时间差并更新电机速度。
平头哥CDK提供的工具集对于开发基于中科昊芯HX2000系列芯片的双电机有感FOC控制系统提供了强大的支持,简化了开发流程,使得开发者能够更高效地实现复杂的电机控制策略。
平头哥 CDK 助力中科昊芯 HX2000 系列芯片
之双电机有感 FOC 控制系统专题(三)永磁
电机双闭
平头哥半导体有限公司的剑池集成开发环境(以下简称“CDK”)已发布最新版本
V2.10.5,请及时更新。
自中科昊芯推出专题阐述 HXS320F28034 双电机有感 FOC 控制系统实现以来,第一期
主要分析了双电机有感 FOC 控制原理,第二期着重分析了永磁 BLDC 的霍尔位置开环
控制。
本期采用 CDK-V2.10.3 版本与 AioneMotor_DSC28034 电机驱控一体板联合开发内置霍
尔位置传感器的永磁 BLDC 双闭环调速,特点是实现方法简单、硬件成本低,相比 FOC
转矩脉动较大。
BLDC 的双闭环调速原理如图 1,系统给定转速 nref 与通过每 60 度换相的时间间隔求
得的 BLDC 实际转速 nfbk 相比较,经速度 PI 调节器运算得到电流给定值 iref,与电
流采样的反馈值 ifbk 进行比较,经电流 PI 调节器输出调制波信号,与 PWM 模块输出
的三角波信号相比较得到调制的脉宽信号,按“六步换相”算法驱动逆变器,实现双
闭环调速。
依照上述原理,设计 HXS320F28034 永磁电机双闭环控制系统如图 2,通过 GPIO 按键
控制电机使能与转速给定,经双闭环 PI 调节输出 PWM 波的导通脉宽从而实现电机调
速,
下载后可阅读完整内容,剩余4页未读,立即下载
126 浏览量
117 浏览量
2022-08-03 上传
2024-10-30 上传
2024-10-28 上传
2024-10-28 上传
2024-10-30 上传
2024-10-30 上传
225 浏览量

永远的12
- 粉丝: 1115
 我的内容管理
展开
我的内容管理
展开







最新资源
- A7Demo.appstudio:探索JavaScript应用开发
- 百度地图范围内的标注点技术实现
- Foobar2000绿色汉化版:全面提升音频播放体验
- Rhythm Core .NET库:字符串与集合扩展方法详解
- 深入了解Tomcat源码及其依赖包结构
- 物流节约里程法的文档整理与实践分享
- NUnit3.vsix:快速安装NUnit三件套到VS2017及以上版本
- JQuery核心函数使用速查手册详解
- 多种风格的Select下拉框美化插件及其js代码下载
- Mac用户必备:SmartSVN版本控制工具介绍
- ELTE IK Web编程与Web开发课程内容详解
- QuartusII环境下的Verilog锁相环实现
- 横版过关游戏完整VC源码及资源包
- MVC后台管理框架2021版:源码与代码生成器详解
- 宗成庆主讲的自然语言理解课程PPT解析
- Memcached与Tomcat会话共享与Kryo序列化配置指南
