绳牵引并联机构与多指手抓取的力学分析
下载需积分: 10 | PDF格式 | 523KB |
更新于2024-08-11
| 122 浏览量 | 举报
"绳牵引并联机构与多指手抓取的连接关系 (2006年)"
这篇2006年的论文主要探讨了绳牵引并联机构与多指手抓取之间的结构相关性和力传递相似性。绳牵引并联机构因其独特的结构特性,如简单、大工作空间、高负载能力等,在多个领域有着广泛的应用潜力,如吊装、力触觉装置、风洞支撑系统以及地震救援等。然而,由于绳只能产生拉力,不能承受压力,这使得传统的杆支撑并联机构理论不适用于绳牵引并联机构。
论文中提到了一种将多指手抓取理论应用于绳牵引并联机构研究的方法。作者利用平面对心抓取定理和Ebert-Uphoff提出的定理,具体分析了2-2型1R2T机构(一个平动两个转动自由度的并联机构)的力封闭工作空间边界。这一理论工具的运用揭示了两者之间的结构关联性。
此外,论文还指出Canny关于三维封闭抓取的研究对于理解3R3T机构(三个旋转和三个平动自由度的并联机构)的力封闭工作空间边界具有指导意义。3-2-2型、3-3-2型和3-3-3型的3R3T机构的研究可以从Canny的工作中受益,但如何准确地建立两者之间的关系仍有待深入研究。
多指手抓取与绳牵引并联机构的相似性在于,它们的手指或绳子都只施加拉力而不承受压力。这种单向施力的特性在数学映射理论中找到了共通之处。通过比较和分析,论文试图建立起这两类系统的通用分析框架,从而为绳牵引并联机构的设计和控制提供新的理论支持。
关键词:绳牵引、并联机构、多指手抓取、连接关系
这篇论文属于自然科学领域,具有一定的学术价值,对于深入理解和应用绳牵引并联机构以及多指手抓取技术的工程师和研究人员具有参考意义。它不仅提供了理论分析,还为未来的研究方向给出了启示,即如何更有效地结合这两种系统的特性,发展出更先进的并联机构技术和抓取策略。
第 27 卷 第 4 期 华 侨 大 学 学 报 ( 自 然 科 学 版 ) Vol.27 No.4
2006 年 10 月 Journal of Huaqiao University (Natural Science) Oct.2006
文章编号 1000-5013(2006)04-0396-04
绳 牵 引 并 联 机 构 与 多 指 手 抓 取 的 连 接 关 系
郑 亚 青
( 华侨大学机电及自动化学院, 福建 泉州 362021)
摘要 由于绳牵引并联机构与等价的无摩擦点接触抓取模型存在结构相关性和力传递相似性,所以分析多
指手抓取中一个位形的瞬时特性的很多工具,可以用来研究绳牵引并联机构的相关问题.利用平面对心抓取
定理与 Ebert-Uphoff 提出的相关定理,确定 2-2 型 1R2T 机构的力封闭工作空间边界.文中指出,Canny 关于 3
维封闭抓取的研究工作对确定 3-2-2 型,3-3-2 型和 3-3-3 型的 3R3T 机构的力封闭工作空间边界有指导意义,
但两者之间的真实关系还有待于进一步深入研究.
关键词 绳牵引, 并联机构, 多指手抓取, 连接关系
中图分类号 TH 112 文献标识码 A
绳牵引并联机构是一种新型并联机构,具有结构简单、工作空间大、高负载能力、极高的负载 /重量
比、易拆装、可重组、模块化程度高、价格低廉和运动速度快等优点
〔1〕
.绳牵引并联机构在吊装领域的应
用已有多年,目前的应用基础研究领域包括小型的装置,如力触觉装置和风洞支撑系统,以及在地震领
域的救生系统等 畅由于绳只能产生拉力,不能承受压力,因此用于研究的传统杆支撑并联机构的理论和
方法都不适用于研究绳牵引并联机构;相反地,多指手抓取的手指施力的单向性性质,使得其与绳牵引
并联机构在数学的映射理论存在一定联系 畅本文探讨两者在结构方面的相关性和力传递相似性问题.
1 相关性比较
1.1 绳牵引并联机构
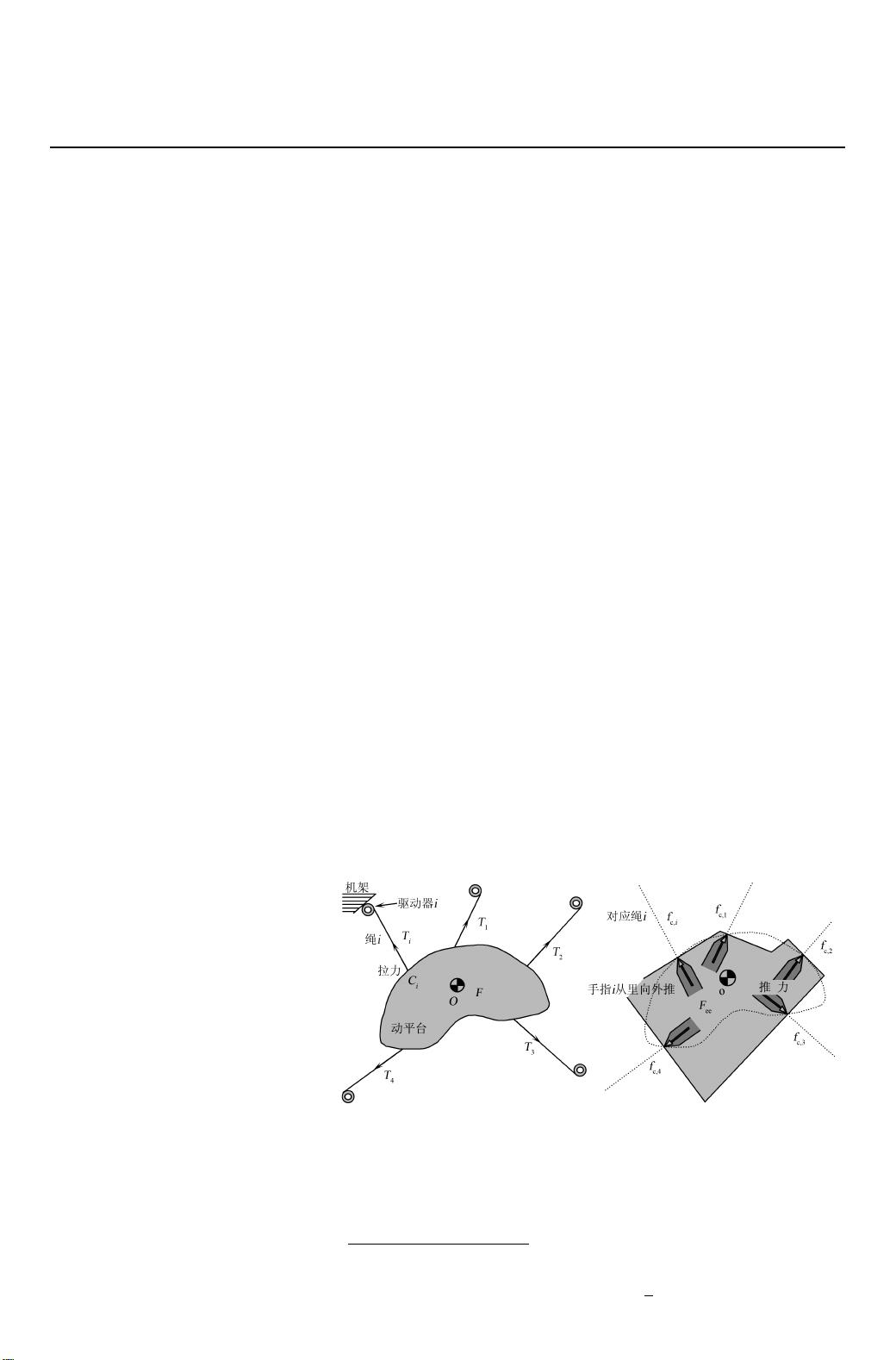
绳牵引并联机构是将驱动器的运动和力以绳为介质,并行转换成动平台的运动和力的封闭装置.其
组成元素包括机架、驱动器、绳、动平台、连接驱动器与绳的点状铰链和连接绳与动平台的点状铰链.图
图 1 绳牵引并联机构 图 2 无摩擦点接触抓取模型
1 为 5 根绳牵引的 1R2T(1 个平动 2
个转动)自由度的并联机构简图.
1.2 无摩擦点接触抓取
图 2 为 5 个无摩擦点接触抓取
一个物体的示意图.不过,该抓取模
型与一般的抓取模型的不同点在于,
每个手指要位于物体的“ 内部”,即
手指由里向外推产生推力而不是压
力.
1.3 两者的结构相关性
为了使图 1 所示的绳牵引并联机构和图 2 所示的抓取模型存在结构上的相关,还必须符合以下 4
个前提
〔1〕
.(1) 因为绳与动平台的连接是点状的,所以接触点在抓取模型上不能滑动.(2) 物体表面法
线方向与相关绳的牵引方向一致.(3) 除了接触点外,物体的几何形状是任意的.(4) 如果物体的表面
法线总是能很好得到定义的,即不存在
收稿日期 2006-02-21
作者简介 郑亚青(1974-),女,讲师,博士,主要从事绳牵引并联机构的研究.E-mail:yq zheng@hqu.edu.cn
下载后可阅读完整内容,剩余4页未读,立即下载
相关推荐


weixin_38723559
- 粉丝: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 全面详实的大学生电工实习报告汇总
- 利用极光推送实现App间的消息传递
- 基于JavaScript的节点天气网站开发教程
- 三星贴片机1+1SMT制程方案详细介绍
- PCA与SVM结合的机器学习分类方法
- 钱能版C++课后习题完整答案解析
- 拼音检索ListView:实现快速拼音排序功能
- 手机mp3音量提升神器:mp3Trim使用指南
- 《自动控制原理第二版》习题答案解析
- 广西移动数据库脚本文件详解
- 谭浩强C语言与C++教材PDF版下载
- 汽车电器及电子技术实验操作手册下载
- 2008通信定额概预算教程:快速入门指南
- 流行的表情打分评论特效:实现QQ风格互动
- 使用Winform实现GDI+图像处理与鼠标交互
- Python环境配置教程:安装Tkinter和TTk
