SOMEIP协议下的CANoe软件仿真:面向服务的车载网络架构
版权申诉
本文主要讨论了基于SOMEIP协议的CANoe软件仿真在汽车行业的应用,特别是在车载以太网通信中实现动态、面向服务的通信的重要性。SOME/IP协议与传统的CAN总线通信方式形成了鲜明对比,后者是面向信号的,而SOME/IP则提供了服务导向的通信接口,更适应现代汽车网络的需求。
首先,问题一指出车载以太网采用动态、面向服务的通信是因为它支持点对点连接,允许数据传输更加灵活,且可以根据应用程序需求动态地提供或请求服务。这种设计有助于提高带宽效率,尤其是在处理摄像头和扩展至其他应用时。
其次,时戳在SOME/IP协议中扮演着关键角色,它们用于确保服务请求和响应的时间同步,这对于保证汽车网络的实时性和可靠性至关重要。时戳机制可以帮助管理数据包的顺序和超时,确保在出现通信错误时能够快速响应。
文章的核心部分介绍了SOME/IP协议的工作流程:首先,服务发现(SD)用于ECU间的服务查找和注册,客户端通过RPC来调用这些服务,形成一种松耦合的通信模式。此外,SOME/IP允许设置事件通知,当服务状态变化时,服务器会主动推送给客户端,增强了实时交互性。
在实现上,Vector公司提供了基于SOME/IP的工具链,包括TCP/IP协议栈、服务发现模块和服务驱动程序,以支持 BroadR-Reach以太网的开发。这些工具链确保了协议在AUTOSAR架构中的良好集成,满足了汽车网络对于高可靠性和实时性的要求。
DLL文件(动态链接库)的调用在SOME/IP环境中可能涉及服务提供者暴露其接口供外部模块调用,通常通过预先编译的接口函数实现。应用程序开发者可以通过这些接口与SOME/IP服务进行交互,实现车辆系统的功能集成。
本文详细阐述了SOME/IP协议在CANoe软件仿真的应用,强调了其在车载以太网通信中的优势,以及如何通过服务发现、远程过程调用和事件通知等功能实现面向服务的高效通信。这对于理解和开发汽车电子控制单元(ECU)间的通信解决方案具有重要的参考价值。
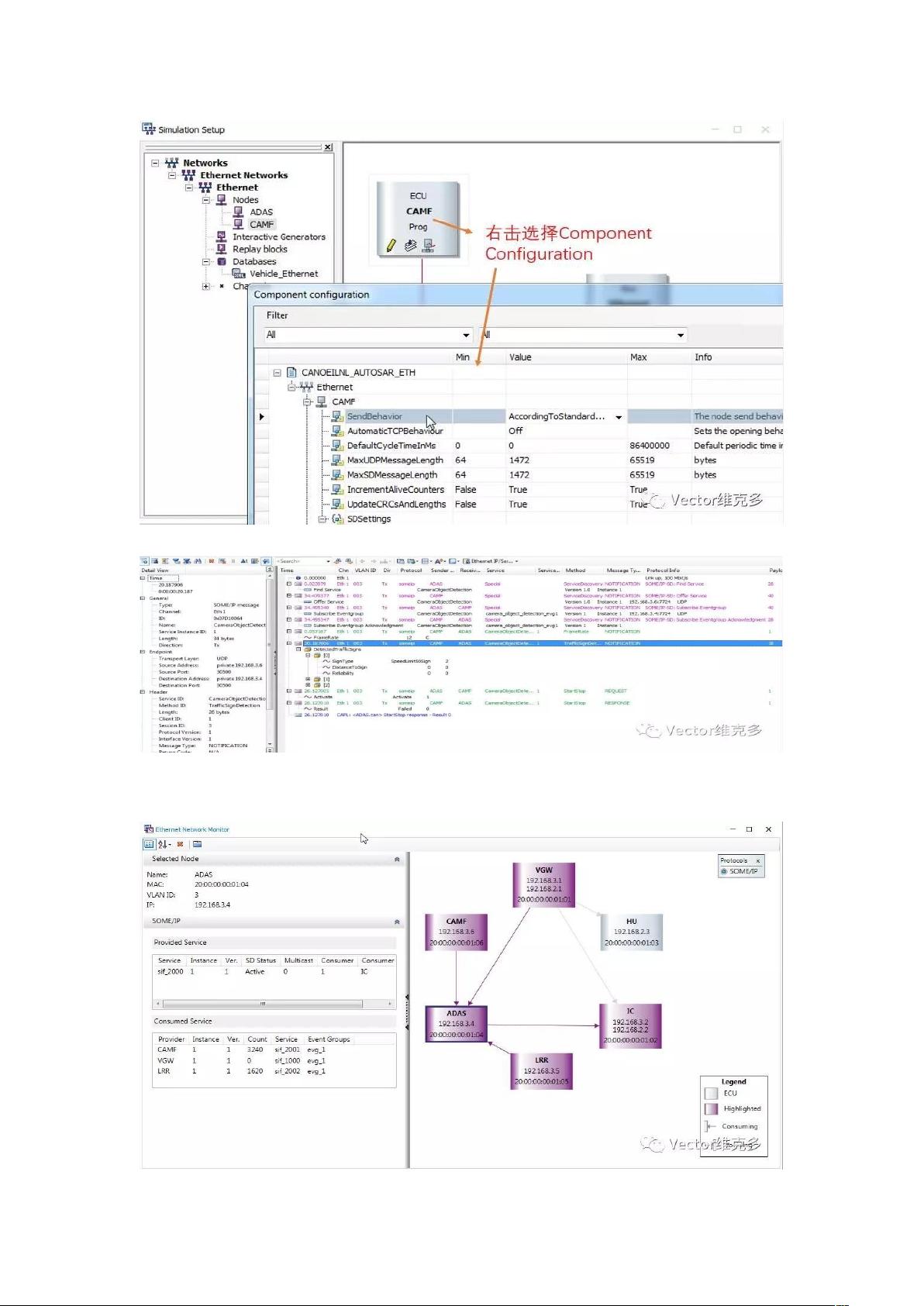
在 1 窗口可以查看 的通信过程,如图 8 所示。
+9 版本中新增一个 4 分析窗口,可以方便地查看
各节点的订阅关系和相关服务信息,如图 : 所示。
剩余20页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
179 浏览量


木子n1
- 粉丝: 1765
- 资源: 145
 我的内容管理
展开
我的内容管理
展开







最新资源
- 印制电路板的检验标准
- 中级质量工程师《质量专业综合知识》笔记(2)
- 信息化工程安全监理规范
- 中小企业网络设计配置
- 从C\C++到Objective-C
- informatica_powercenter教程
- 计算机子网掩码概述都来看
- 非常好的机房建设方案
- shapefile白皮书
- K3V10.4BOS插件开发手册.pdf
- Windows95程式设计指南候捷·pdf.pdf
- qt-extended-4.4.3多种编译
- The_0x10_Best_Questions_for_Would-be_Embedded_Programmers
- 银行系统软件接口测试
- NHibernate_study
- C#软件工程师面试问题
