智能控制考试试题解析:PID vs 模糊控制
版权申诉
8 浏览量
更新于2024-07-07
收藏 906KB PDF 举报
"智能控制-考试题(附答案)整理.pdf"
在智能控制领域,本资料主要探讨了三种类型的控制器:常规PID算法控制器、模糊控制器以及模糊自适应PID控制器,并涉及了如何设计这些控制器以应对不同情况下的控制问题。具体来说,试题中给出了一个工业过程的被控对象模型,即传递函数 \( G(s) = \frac{0.5}{(s+10)(s+2)} \),并要求对比分析这几种控制器在被控对象参数变化和结构变化时的性能。
1. 常规PID控制器:PID控制器是最基本的反馈控制策略,由比例(P)、积分(I)和微分(D)三部分组成。其连续形式的控制器方程为 \( u(t) = K_p e(t) + K_i \int e(t) dt + K_d \frac{de(t)}{dt} \)。其中,\( K_p \) 是比例系数,\( K_i \) 是积分时间常数,\( K_d \) 是微分时间常数。Ziegler和Nichols提出的临界比例度法是一种常用的整定PID参数的方法,通过实验获得控制器的最优参数,以达到良好的控制性能。在本题中,通过实验整定,临界增益为1.168,临界振荡周期为5.384,进而得到相应的PID参数。
2. 模糊控制器:模糊控制器基于模糊逻辑理论,通过将输入变量(如误差和误差变化率)转换为模糊集,然后应用模糊规则来确定输出。对于模糊控制器,设计通常涉及定义输入和输出的模糊集合,以及构建模糊推理规则,以生成控制输出。在本例中,需要计算模糊控制的决策表,该决策表反映了不同输入值对应的控制动作。
3. 模糊自适应PID控制器:这种控制器结合了模糊控制的灵活性和PID控制的稳定性。它通过自适应算法调整PID参数,使得控制器能适应被控对象的变化。在设计模糊自适应PID控制器时,需要考虑如何更新模糊规则和PID参数,以确保在对象参数变化时仍能保持良好的控制性能。
试题还要求对模糊控制器的动态和静态性能进行改善的方法进行研究。改善模糊控制器性能通常可以通过以下方式实现:
- 扩展模糊规则库,增加规则的数量和复杂性。
- 调整模糊集的形状和大小,优化输入和输出变量的量化。
- 采用自适应算法动态调整PID参数,以适应对象的变化。
- 对模糊推理进行改进,如采用T-S模糊模型或神经网络模糊模型。
- 优化隶属度函数和规则融合策略。
通过比较这三种控制器在被控对象参数变化和结构变化时的性能,可以评估每种控制器的鲁棒性和适应性。在实际应用中,选择合适的控制器类型取决于系统的特定需求,如响应速度、稳定性和抗干扰能力。此外,理解这些控制器的设计和性能特性对于控制系统的设计和优化至关重要。
NS NB NM NM NS ZO ZO ZO
ZO NM NS NS ZO PS PS PM
PS ZO ZO ZO PS PM PM PB
PM ZO ZO PS PM PM PB PB
PB ZO PS PM PB PB PB PB
模糊决策一般采用 Mamdani(min-max)决策法。解模糊有重心法、等分法、
最大隶属度平均法等 5 种可供选择,在此采用重心法( centroid)。根据以上规则
和方法,设计出模糊控制器的输出与输入的关系曲面图, 即得出模糊规则是一种
非线性控制。
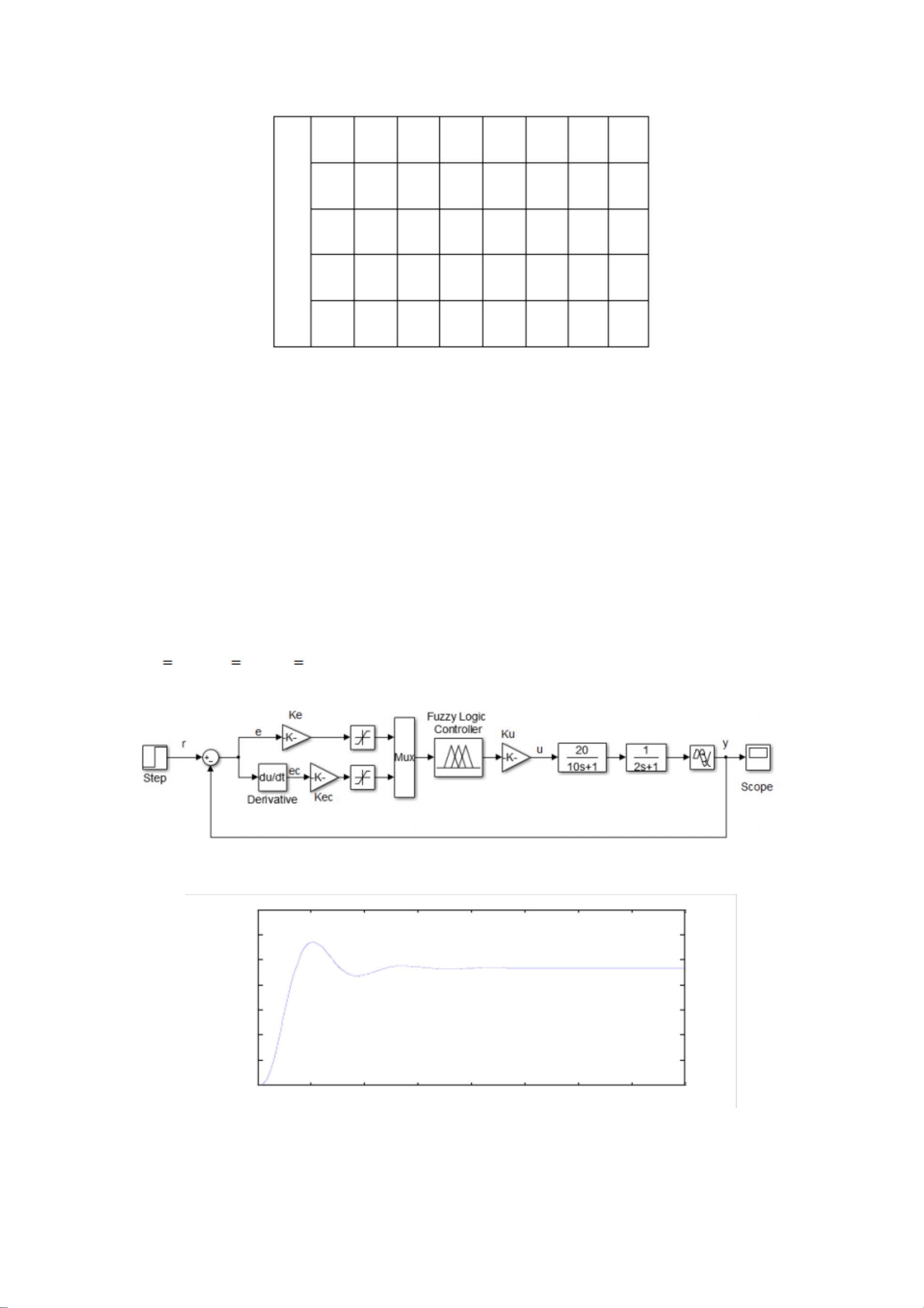
基此,可搭建如图 1.5 所示的模糊控制系统 Simulink 仿真模型, 通过模糊控
制器模块,可以和包含模糊控制器的 fis 文件联系起来,还可以随时改变输入输
出论域,隶属度函数以及模糊规则,方便仿真和调试。经过多次整定,选取误差
E 、 误 差 变 化 率 EC 的 量 化 因 子 及 控 制 量 U 的 比 例 因 子 分 别 为 :
0.5, 0.1, 0.6
e ec u
k k k ,仿真得到系统阶跃响应曲线如图 1.6 所示。
图 1.5 模糊控制系统 Simulink 仿真模型
0 5 10 15 20 25 30 35 40
0
0.2
0.4
0.6
0.8
1
1.2
1.4
T ime(s)
y
(
t
)
图 1.6 模糊控制系统阶跃响应曲线
从图 1.6 可以看出,单纯的模糊控制器相当于非线性的 PD 控制,无积分作
剩余18页未读,继续阅读
2021-11-07 上传
2021-12-01 上传
2022-03-10 上传
2023-11-29 上传
2023-09-10 上传
2023-10-06 上传
2024-01-01 上传
2023-07-02 上传
2023-09-08 上传

cyh76339129
- 粉丝: 1
- 资源: 14万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- NIST REFPROP问题反馈与解决方案存储库
- 掌握LeetCode习题的系统开源答案
- ctop:实现汉字按首字母拼音分类排序的PHP工具
- 微信小程序课程学习——投资融资类产品说明
- Matlab犯罪模拟器开发:探索《当蛮力失败》犯罪惩罚模型
- Java网上招聘系统实战项目源码及部署教程
- OneSky APIPHP5库:PHP5.1及以上版本的API集成
- 实时监控MySQL导入进度的bash脚本技巧
- 使用MATLAB开发交流电压脉冲生成控制系统
- ESP32安全OTA更新:原生API与WebSocket加密传输
- Sonic-Sharp: 基于《刺猬索尼克》的开源C#游戏引擎
- Java文章发布系统源码及部署教程
- CQUPT Python课程代码资源完整分享
- 易语言实现获取目录尺寸的Scripting.FileSystemObject对象方法
- Excel宾果卡生成器:自定义和打印多张卡片
- 使用HALCON实现图像二维码自动读取与解码
