ORK完整教程:安装与ROS交互指南
需积分: 50 99 浏览量
更新于2024-07-18
2
收藏 5.19MB DOCX 举报
"ORK教程涵盖了从安装到使用的全过程,包括ORK(open source recognition kit)的安装、SensorKinect的配置、数据库的建立以及ROS消息传递。教程详细解释了如何在Ubuntu环境下进行ORK的设置,涉及了OpenNI的安装、LibUSB库的安装,以及快速指南中的数据库可视化数据操作和物体捕获等步骤。"
详细知识点:
1. ORK介绍: ORK是一个开源识别工具包,主要用于目标识别和环境理解。它提供了从传感器数据到识别结果的处理流程,支持多种硬件平台和操作系统。
2. ORK安装:
- 安装OpenNI: 使用`sudo apt-get install openni2-utils`来安装OpenNI,这是一个用于3D感知和运动捕捉的框架。
- SensorKinect配置: 通过Git克隆SensorKinect仓库,然后在特定目录执行脚本完成安装。注意,安装过程中可能需要对文件的执行权限进行调整。
3. LibUSB库安装:
- LibUSB-1.0-0-dev是用于USB设备通信的库,使用`sudo apt-get install libusb-1.0-0-dev`进行安装。
- freeglut3-dev是用于开发OpenGL应用程序的库,也需通过`sudo apt-get install freeglut3-dev`进行安装。
4. ORK快速指南:
- 数据库可视化数据: 使用`rosrun object_recognition_core push.sh`命令可以查看数据库中的可视化数据,这有助于理解并调试识别过程。
- 启动ROS核心: 在终端1中运行`roscore`启动ROS的核心服务。
- 启动SensorKinect: 在终端2中运行`roslaunch openni_launch openni.launch`来启动SensorKinect,以获取和处理来自Kinect的传感器数据。
- 对象捕获与预览: `rosrun object_recognition_capture capture --seg_z_min 0.01 --osilk.bag --preview`命令用于捕获和预览场景中的对象。
5. ROS消息传递: ORK与ROS的集成使得数据能够在不同节点之间高效传递,ROS的消息机制使得传感器数据、识别结果等信息能够被正确处理和分发。
总结来说,ORK教程提供了一个详尽的流程,指导用户在Ubuntu环境下设置ORK环境,配置SensorKinect硬件,并进行物体识别的初步操作。通过ROS的使用,教程还展示了如何处理和利用从传感器获取的数据,从而实现视觉识别功能。
3.1.3 DB 中创建对象
主要是识别对象的,所以首先需要将对象存储在 中。一些像 $ 这
样的管道可以用来创建。但是你也要从内核()中用脚本对其进行处理。
rosrun object_recognition_core object_add.py -n coke -d "A universal can of coke"
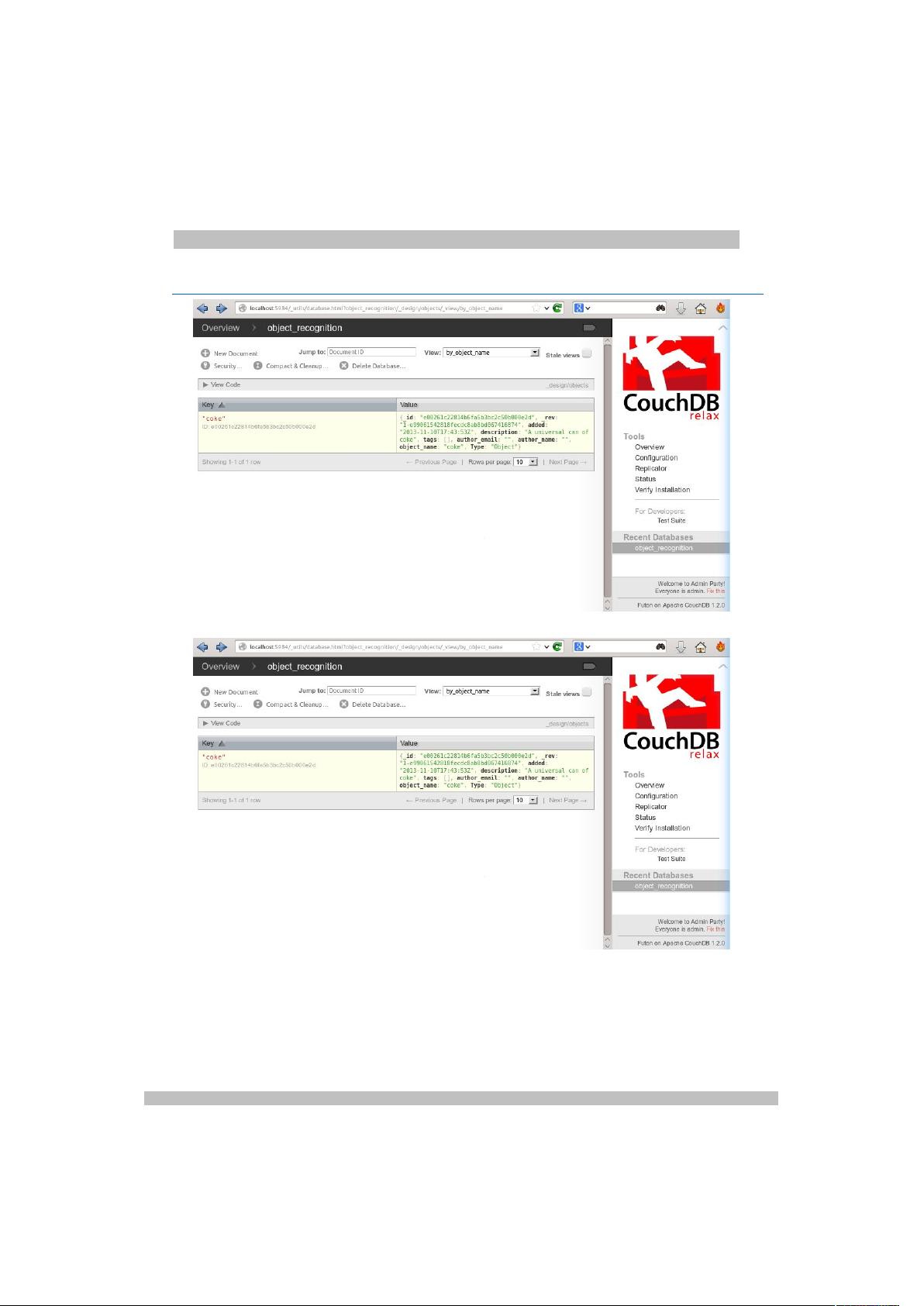
然后就可以通过访问网址来检查数据库中的这个对象。
;$<44< %!4B14#C#9B(14B(4#94B=D4#EB#9B
点击对象,可以看到对象的信息,尤其是对象的 :
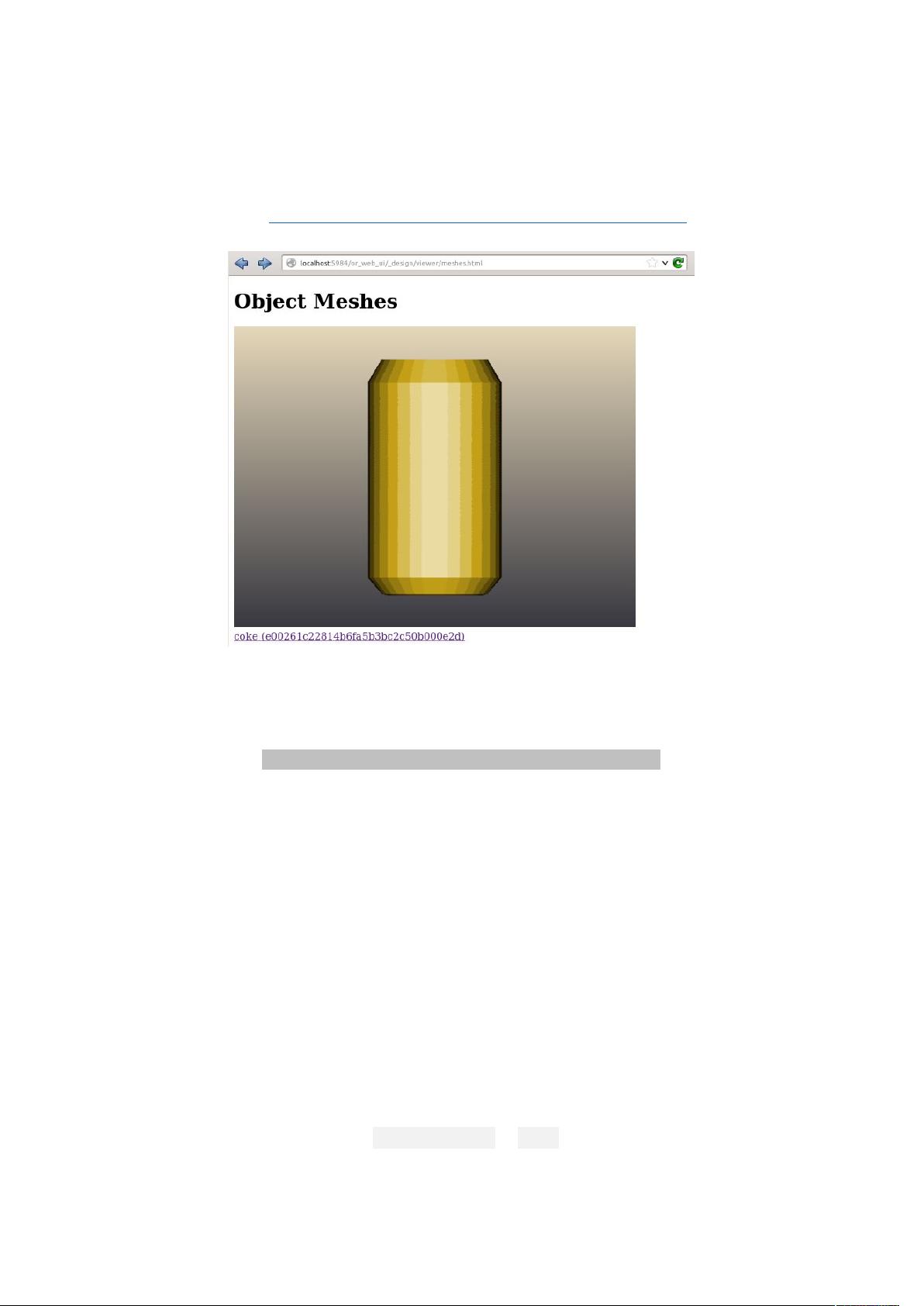
3.1.4 手动给对象添加 mesh
首先,使用 (包括对象)接口来检查对象的 : 的每个元素都有其自己的哈希
表作为唯一标识(防止你给不同的对象相同的命名),这就是你应当如何去参考对象。
上传 :
!"#$%&'()*+,-.$/ .00#11!!
24
剩余38页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2022-11-12 上传
2021-03-05 上传
2012-12-28 上传
2024-10-15 上传
2022-06-24 上传

lwl223442
- 粉丝: 31
- 资源: 25
 我的内容管理
展开
我的内容管理
展开







最新资源
- MATLAB新功能:Multi-frame ViewRGB制作彩色图阴影
- XKCD Substitutions 3-crx插件:创新的网页文字替换工具
- Python实现8位等离子效果开源项目plasma.py解读
- 维护商店移动应用:基于PhoneGap的移动API应用
- Laravel-Admin的Redis Manager扩展使用教程
- Jekyll代理主题使用指南及文件结构解析
- cPanel中PHP多版本插件的安装与配置指南
- 深入探讨React和Typescript在Alias kopio游戏中的应用
- node.js OSC服务器实现:Gibber消息转换技术解析
- 体验最新升级版的mdbootstrap pro 6.1.0组件库
- 超市盘点过机系统实现与delphi应用
- Boogle: 探索 Python 编程的 Boggle 仿制品
- C++实现的Physics2D简易2D物理模拟
- 傅里叶级数在分数阶微分积分计算中的应用与实现
- Windows Phone与PhoneGap应用隔离存储文件访问方法
- iso8601-interval-recurrence:掌握ISO8601日期范围与重复间隔检查
