伺服电机电子齿轮比计算实例与原理详解
需积分: 50 174 浏览量
更新于2024-09-09
收藏 294KB PDF 举报
电子齿轮比是伺服控制系统中的关键参数,用于调整电机的实际运动速度与上位机指令之间的关系。在伺服电机中,它通过改变上位机发送的脉冲频率来实现对电机转速的精细控制。以下是两个具体的计算示例:
1. **例子1:** 设计一个伺服电机,其编码器分辨率是131072P/R(脉冲数每转),额定转速为3000r/min(每分钟转数),上位机能够发送200Kpulse/s(每秒脉冲数)。为了达到3000r/min的额定转速,需要通过电子齿轮比进行调整。计算过程如下:
- 上位机发送脉冲频率:200Kpulse/s
- 马达实际需要的脉冲频率:3000r/min × (60s/min / 1r) = 180000 pulse/s
要达到上位机发送的脉冲频率,电子齿轮比(CMX/CDV)应该满足以下关系:
CMX/CDV × 200K = 180000
解得电子齿轮比至少为:\( CMX/CDV = \frac{180000}{200000} = 0.9 \)
2. **例子2:** 另一场景中,伺服电机的编码器分辨率也为131072P/R,滚珠丝杠的进给量Pb为8mm。设定指令脉冲当量为0.1um/p(每脉冲移动0.1微米),目标是计算电子齿轮比和脉冲频率。
- (1) 反馈脉冲当量(一个脉冲移动的距离):\( \Delta Lo = \frac{8mm}{131072} \)
- (2) 指令脉冲当量计算电子齿轮比:\( \Delta Lo \times \text{电子齿轮比} \times 1000 = 0.1um \)
- (3) 脉冲频率计算:电机额定速度3000rpm转化为脉冲频率 \( Fc \times \text{电子齿轮比} = \frac{3000}{60} \times 131072 \)
在实际应用中,电子齿轮比(B/A)的计算涉及以下几个概念:
- **机械减速比(m/n)**:这是机械结构中的减速器参数,表示输入轴转速与输出轴转速的比例,相当于编码器和滚珠丝杠齿数比。
- **电子齿轮比(B/A)**:是电子控制中的概念,用来放大或缩小上位机发送的脉冲频率,通常表现为一个分数形式,分子(B)代表放大倍数,分母(A)代表缩小倍数。
理解并灵活运用这些概念有助于精确地调整伺服电机的运动控制,确保设备按需精确运行,提高生产效率和加工精度。
电子齿轮比计算样例
电子齿轮比是伺服中经常要用到的, 初学者对这个参数的设置有时会不解, 先介绍两个伺服电子
齿轮设置方面的 2 个小例子,供大家参考下。
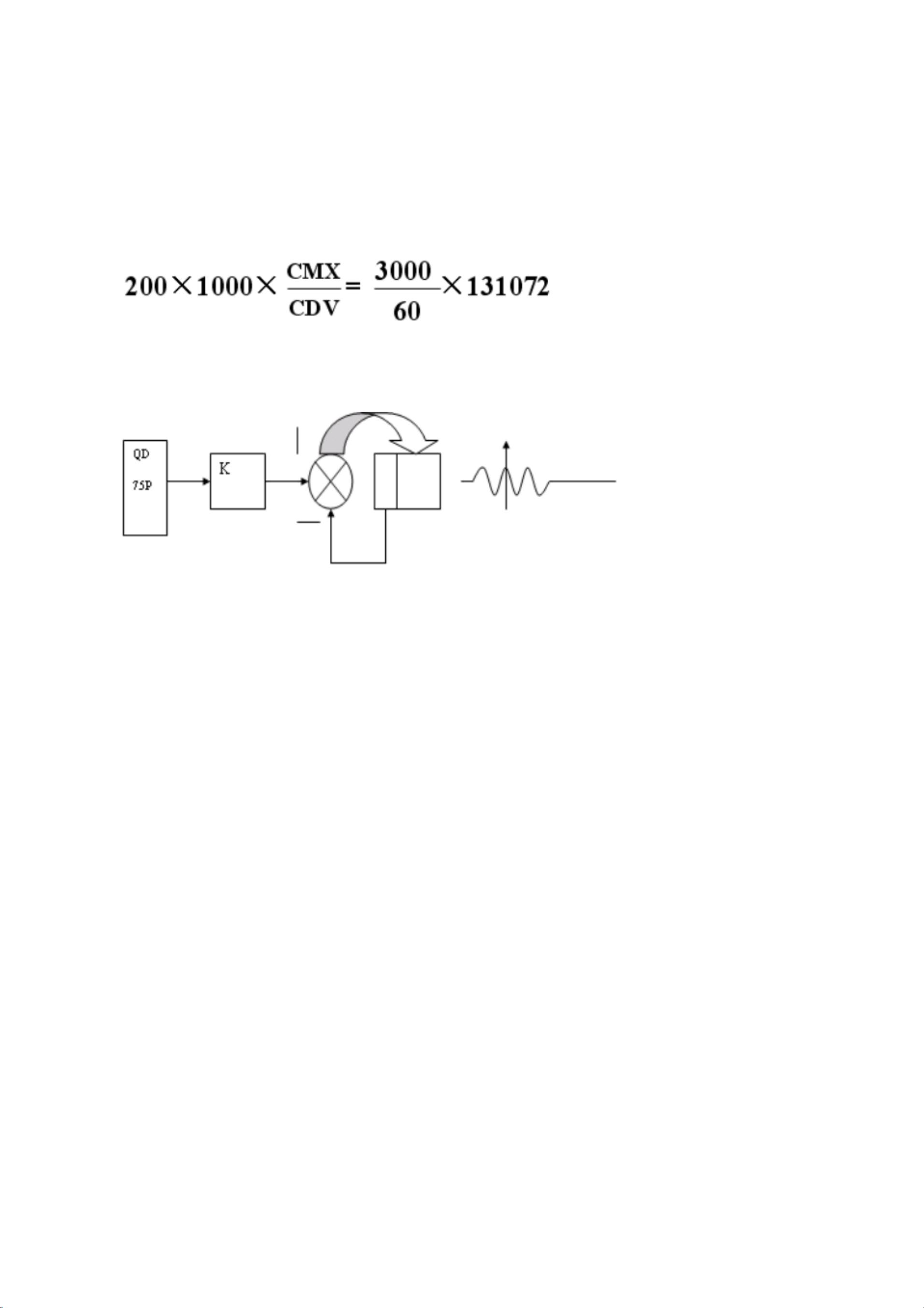
例子 1:已知伺服马达的编码器的分辨率是 131072 P/R, 额定转速为 3000r/min, 上位机发送脉冲
的能力为 200Kpulse/s ,要想达到额定转速,那么电子齿轮比至少应该设为多少?
计算如下图所示
根据上图中的算法,可以算出电子齿轮比 CMX/CDV的值
例子 2:已知伺服马达的分辨率是 131072 P/R, 滚珠丝杠的进给量为 Pb =8mm。
(1) 计算反馈脉冲的当量(一个脉冲走多少)?
△Lo=
(2) 要求指令脉冲当量为 0.1um/p , 电子齿轮比应为多少?
电子齿轮比=
(3) 电机的额定速度为 3000rpm,脉冲频率应为多少?
Fc=
解答:
(1) 计算反馈脉冲的当量(一个脉冲走多少)?
△Lo= 8mm/131072
(2) 要求指令脉冲当量为 0.1um/p ,电子齿轮比应为多少?
△Lo×电子齿轮比× 1000=0.1
(3) 电机的额定速度为 3000rpm,脉冲频率应为多少?
Fc×电子齿轮比 =3000/60×131072
电子齿轮比与脉冲当量相关计算
1、 什么是机械减速比 (m/n)
答:机械减速比的定义是减速器输入转速与输出转速的比值,也等于从动轮齿数与主动轮齿数的
比值。在数控机床上为电机轴转速与丝杠转速之比。
2、什么是电子齿轮比
答:电子齿轮比就是对伺服接受到上位机的脉冲频率进行放大或者缩小,其中一个参数为分子,
一个为分母。如分子大于分母就是放大,如分子小于分母就是缩小。例如:上位机输入频率 100HZ,
电子齿轮比分子设为 1,分母设为 2,那么伺服实际运行速度按照 50HZ 的脉冲来进行。上位机输入
频率 100HZ,电子齿轮比分子设为 2,分母设为 1,那么伺服实际运行速度按照 200HZ 的脉冲来进行
3、 怎样计算电子齿轮比( B/A )
明白几个概念:
编码器分辨率 (F):伺服电机轴旋转一圈所需脉冲数。看伺服电机的铭牌,在对驱动器说明书既可确
定编码器的分辨率。
每转脉冲数 (f):丝杠转动一圈所需脉冲数。
下载后可阅读完整内容,剩余3页未读,立即下载
2012-09-15 上传
2021-09-29 上传
2019-04-08 上传
2019-07-31 上传
2022-05-30 上传

feng724
- 粉丝: 0
- 资源: 7
 我的内容管理
展开
我的内容管理
展开







最新资源
- 构建基于Django和Stripe的SaaS应用教程
- Symfony2框架打造的RESTful问答系统icare-server
- 蓝桥杯Python试题解析与答案题库
- Go语言实现NWA到WAV文件格式转换工具
- 基于Django的医患管理系统应用
- Jenkins工作流插件开发指南:支持Workflow Python模块
- Java红酒网站项目源码解析与系统开源介绍
- Underworld Exporter资产定义文件详解
- Java版Crash Bandicoot资源库:逆向工程与源码分享
- Spring Boot Starter 自动IP计数功能实现指南
- 我的世界牛顿物理学模组深入解析
- STM32单片机工程创建详解与模板应用
- GDG堪萨斯城代码实验室:离子与火力基地示例应用
- Android Capstone项目:实现Potlatch服务器与OAuth2.0认证
- Cbit类:简化计算封装与异步任务处理
- Java8兼容的FullContact API Java客户端库介绍
