轮式空间探测机器人移动机构创新设计研究
版权申诉
189 浏览量
更新于2024-06-23
收藏 8.1MB DOC 举报
"本文主要探讨了空间探索机器人的移动机构,特别是轮式移动机构的设计方法,包括构形创新和构形组合。"
在空间探索领域,移动机构是关键组成部分,它决定了机器人的运动性能和任务执行能力。轮式移动机构由于其轻巧、构造简洁以及高效运动的优势,被广泛应用于美国和前苏联的空间探测机器人。本文以此为切入点,深入研究了轮式移动机构的创新设计。
首先,作者将轮式机器人移动机构的设计问题归纳为构形创新和构形组合两大部分。构形创新涉及到全新机构形态的设计,而构形组合则是通过对已有组件的不同组合来创建新的移动机构。这种分类方法为设计过程提供了理论框架。
在第二部分,文章介绍了基于构形组合的设计方法的基础理论。同构的概念被用来描述具有相同拓扑结构的运动链或机械装置,而子构形则是构成整个移动机构的基本单元,如轮系、悬架和车体。每个子构形的数量(选择度DOC)为设计提供了多样性的可能。
接着,文章详细定义了子构形集合,例如轮系集合W、悬架构形集合S和车体集合B。构形组合则是通过这些子构形的连接形成完整的机器人移动平台,如Ri=(Wi,Bi,Si),其中Wi、Bi、Si分别代表选自轮系、车体和悬架的特定构形。所有可能的构形组合构成了解空间R。
在第三部分,作者分析了国内外空间探测机器人的移动机构,提取出基本构形,并在此基础上提出了多种创新构形,旨在提高机器人的适应性和任务执行效率。
第四部分,利用构形组合的方法,设计了一系列空间探测机器人的具体方案,并对这些方案进行了分析和比较,以评估其性能和潜在的应用场景。
总结来说,本文通过对轮式空间探测机器人移动机构的深入研究,不仅提出了构形创新和构形组合的设计策略,还展示了如何通过这种方法来开发新型机器人平台。这样的研究对于推动空间探索技术的发展,提升机器人在极端环境下的任务执行能力具有重要意义。
1. 牵引力或附着力不足
当空间探测机器人在坡道上等速爬坡时,由于车重产生的上坡阻力和滚动阻力之
和大于车辆所能提供的最大牵引力时,车辆就不能前进了。或者当车轮与地面的附着
性能很差,尽管车辆动力传动系统具有足够大的扭矩,由于行走装置打滑,车辆也不
能前进。
贝克提出的通过性指标S
[36 ]
为:
式中:
S ≈
H − R
all
G
(3.1)
H——土壤推力;
R——行驶阻力;
G——车辆重量。
2. 轮廓碰到障碍物 当空间探测机器人行驶时,会遇到岩石、火山坑等障碍物,
有时会由于车辆前、
后、底部突出部碰到障碍物而不能继续前进。包括:空间探测机器人底部碰到凸起障
碍,使空间探测机器人悬起而失去通过性,即所谓“托底”,也称为顶起失效;空间
探测机器人前端或尾部突出部位触及地面,而使空间探测机器人卡住而不能通过,也
称为触头或托尾失效;空间探测机器人底部因离地间隙不足,而被地面托住无法通过
的现象,即间隙失效。
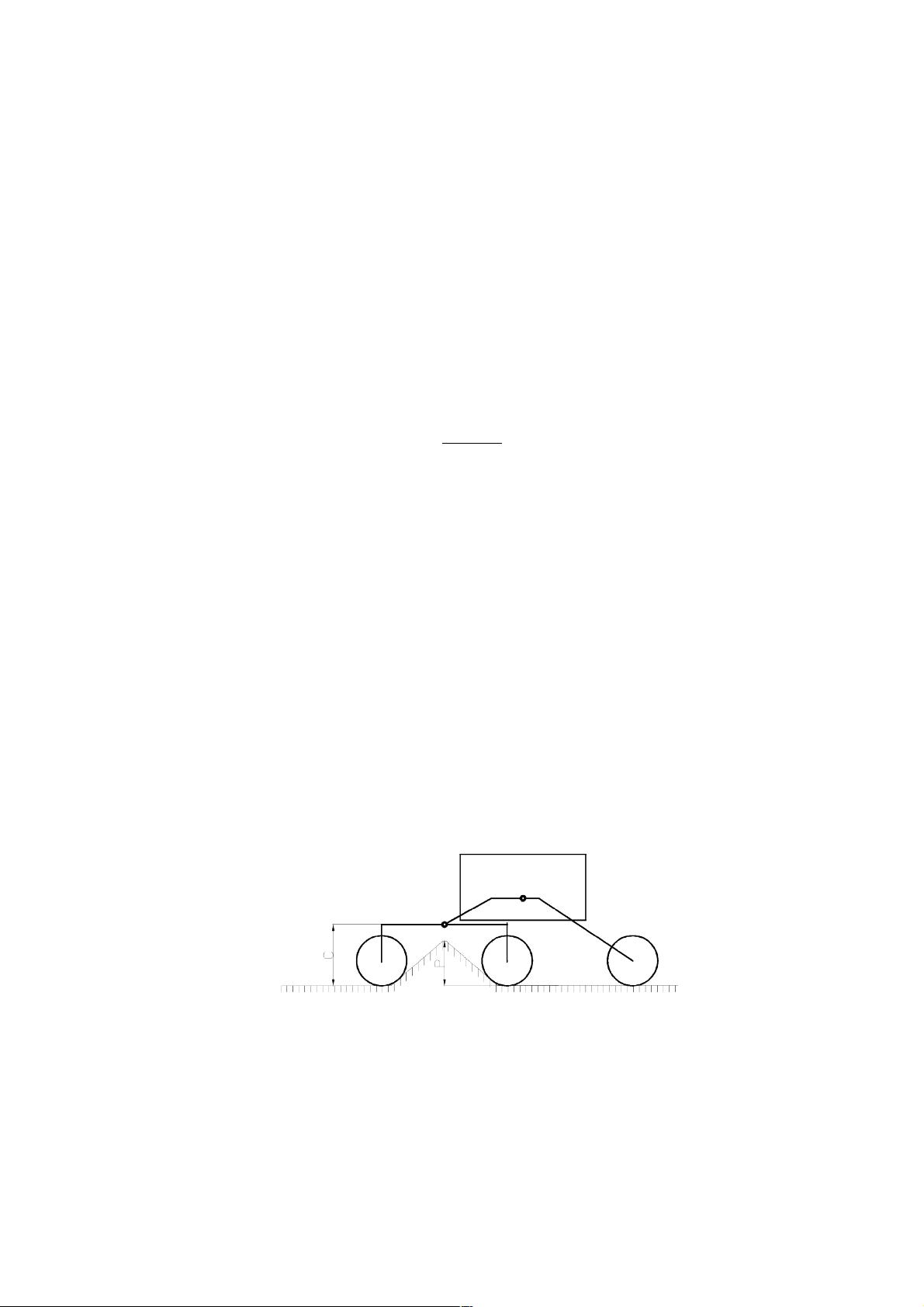
图3-1 离地间隙示意图
最小离地间隙 C 指空间探测机器人除车轮外最低点与路面之间的距离,它表征了
空间探测机器人无碰撞地越过障碍物的能力。如图 3-1 所示。空间探测机器人越过障

剩余119页未读,继续阅读
2023-07-12 上传
2023-02-22 上传
2023-01-25 上传
2021-09-25 上传

老帽爬新坡
- 粉丝: 92
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 单片机串口通信仿真与代码实现详解
- LVGL GUI-Guider工具:设计并仿真LVGL界面
- Unity3D魔幻风格游戏UI界面与按钮图标素材详解
- MFC VC++实现串口温度数据显示源代码分析
- JEE培训项目:jee-todolist深度解析
- 74LS138译码器在单片机应用中的实现方法
- Android平台的动物象棋游戏应用开发
- C++系统测试项目:毕业设计与课程实践指南
- WZYAVPlayer:一个适用于iOS的视频播放控件
- ASP实现校园学生信息在线管理系统设计与实践
- 使用node-webkit和AngularJS打造跨平台桌面应用
- C#实现递归绘制圆形的探索
- C++语言项目开发:烟花效果动画实现
- 高效子网掩码计算器:网络工具中的必备应用
- 用Django构建个人博客网站的学习之旅
- SpringBoot微服务搭建与Spring Cloud实践
