西门子S7-1200 PLC实现步进电机控制
需积分: 0 179 浏览量
更新于2024-08-04
1
收藏 844KB PDF 举报
"西门子S7-1200步进电机运动控制系统设计"
本文主要讲解如何使用西门子S7-1200 PLC来实现步进电机的精确控制,包括启停、正反转以及调速功能。系统基于1212CDC/DC/DC型号的CPU,通过梯形图编程和人机界面设计来实现自动化控制。
在程序设计阶段,首先需要在PLC设备组态中配置CPU,并启用高速脉冲发生器(PTO),设置脉冲输出为%Q0.0,方向输出为%Q0.1。脉冲发生器的信号类型设置为PTO,确保能够输出脉冲序列来驱动步进电机。由于步进电机的步距角为1.8°,一圈需要200个脉冲,因此可以通过调整脉冲发生器的频率来改变电机的转速。
梯形图编程中,设计了启动、停止、正转和反转四个功能按钮。启停按钮采用MOVE指令,当启动按钮按下时,将500Hz的频率值赋给脉冲发生器,停止时则赋予0Hz,通过改变REQ端口的逻辑状态来控制脉冲发生器的工作状态。方向控制通过常开和常闭按钮及起保停电路实现,以Q0.1输出来切换电机的旋转方向。
在人机界面设计方面,使用了威纶通的EasybuilderPro软件创建用户界面。界面包含启动停止和正转反转的指示灯,以及实时调速显示,允许用户输入期望的转速。同时,界面具有事件提示功能,如电机启动、停止以及超速警告。
程序验证环节,使用博图V16的仿真软件进行PLC程序的测试。通过PC模拟组态屏,确保在实际运行中,电机的控制能够按照预期进行,确保系统的可靠性和稳定性。
总结来说,这个设计实例详细介绍了西门子S7-1200 PLC在步进电机控制中的应用,涵盖了硬件配置、梯形图编程和人机交互设计,为类似项目提供了清晰的参考步骤和实践方法。通过仿真验证,确保了系统的正确性和实用性。
实现步进电机的转向,转速和启停控制。已知步进电机步距角 1.8°。
梯形图设计
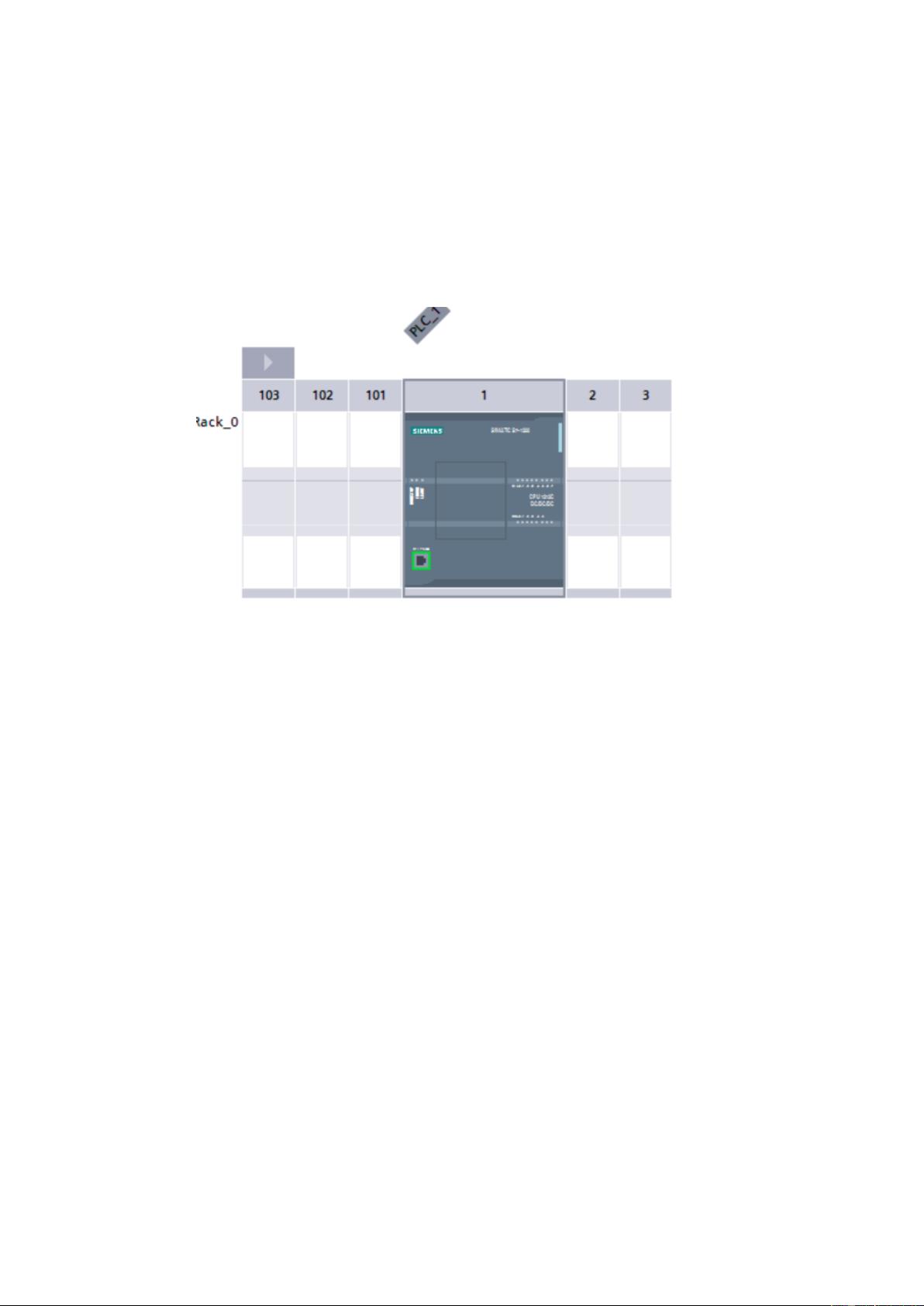
PLC 设备组态设置
PLC 的 CPU 选择 1212C DC/DC/DC。
2.2 程序设计
在编写梯形图之前,首先先对题目进行分析后可知:步进电机的驱动需要启用
脉冲发生器,在本设计中选用高速脉冲发射器,要想使用脉冲发生器,首要要在
PLC 的属性栏中选择启用脉冲发生器,信号类型选择 PTO(脉冲 A 和方向 B),脉冲
输出为%Q0.0,方向输出为%Q0.1。
梯形图编程前,首先根据设计要求确定项目所需要的功能按钮为:启动按钮、
停止按钮、正转按钮和反转按钮。其次项目要求做到电机调速的功能,由上面可
知,通过改变高速脉冲发生器的频率值即可做到调整转速的功能。步进电机的步
距角为 1.8°,根据公式换算可知,电机旋转一圈所需要的脉冲为 200 个。
启停两个按钮的设计思路:这两个按钮可以做到总启和总停,用 MOVE 指令,在
按下按钮的同时把我们设定在 MOVE 指令的 IN 端口的频率值输入到脉冲发生器中,
启动时 IN 口赋予脉冲发生器 500 的频率值,停止时 IN 口赋予脉冲发生器 0 的频
率值,从而做到启动和停止的功能。
下载后可阅读完整内容,剩余5页未读,立即下载
188 浏览量
点击了解资源详情
869 浏览量
129 浏览量
2022-09-21 上传
574 浏览量

Ninelie元宵哥
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 超文本传输协议-HTTP/1.1
- 复旦nios教材(物有所值)
- C8051F330串口实例程序
- 吉林大学2002级C++面向对象程序设计试题答案
- c8051f33x开发工具包用户指南
- tcl中文教程---最好的Tcl脚本语言的中文教程,值得下载
- 正则表达式基本介绍和应用
- db2 730 认证资料
- IBM-PC汇编语言程序设计
- NiosII_SOPCBuilder_Labs_Ver4_011005.
- SAP配置大全(MM部分).pdf
- installshield使用指南
- 带有消息机制的线程 - CustomMessageQueue
- 基于端口的VLAN配置命令
- DIFFERENTIAL GEOMETRY: A First Course in Curves and Surfaces
- SQL Server 2000模拟试题
