GPS技术在救援无人机目标定位中的应用
版权申诉
110 浏览量
更新于2024-06-21
收藏 1.48MB DOCX 举报
"基于GPS技术的救援目标定位"
本文主要探讨了如何利用GPS技术进行救援目标定位,特别是在救援无人机领域的应用。随着社会的进步和科技的发展,国内外对于高效、精确的救援无人机的需求正在持续增长,因此,对救援目标定位的精度和速度提出了更高的要求。
GPS(全球定位系统)是一种通过接收卫星信号来确定地球上任何位置的系统。它由一组地球轨道卫星、地面监控站和接收设备组成。基本工作原理是,地面设备接收到至少四颗卫星的信号,根据信号传播时间计算出距离,通过三角定位的方法确定位置。在救援场景中,GPS定位可以为救援无人机提供准确的目标坐标,从而快速抵达事故现场。
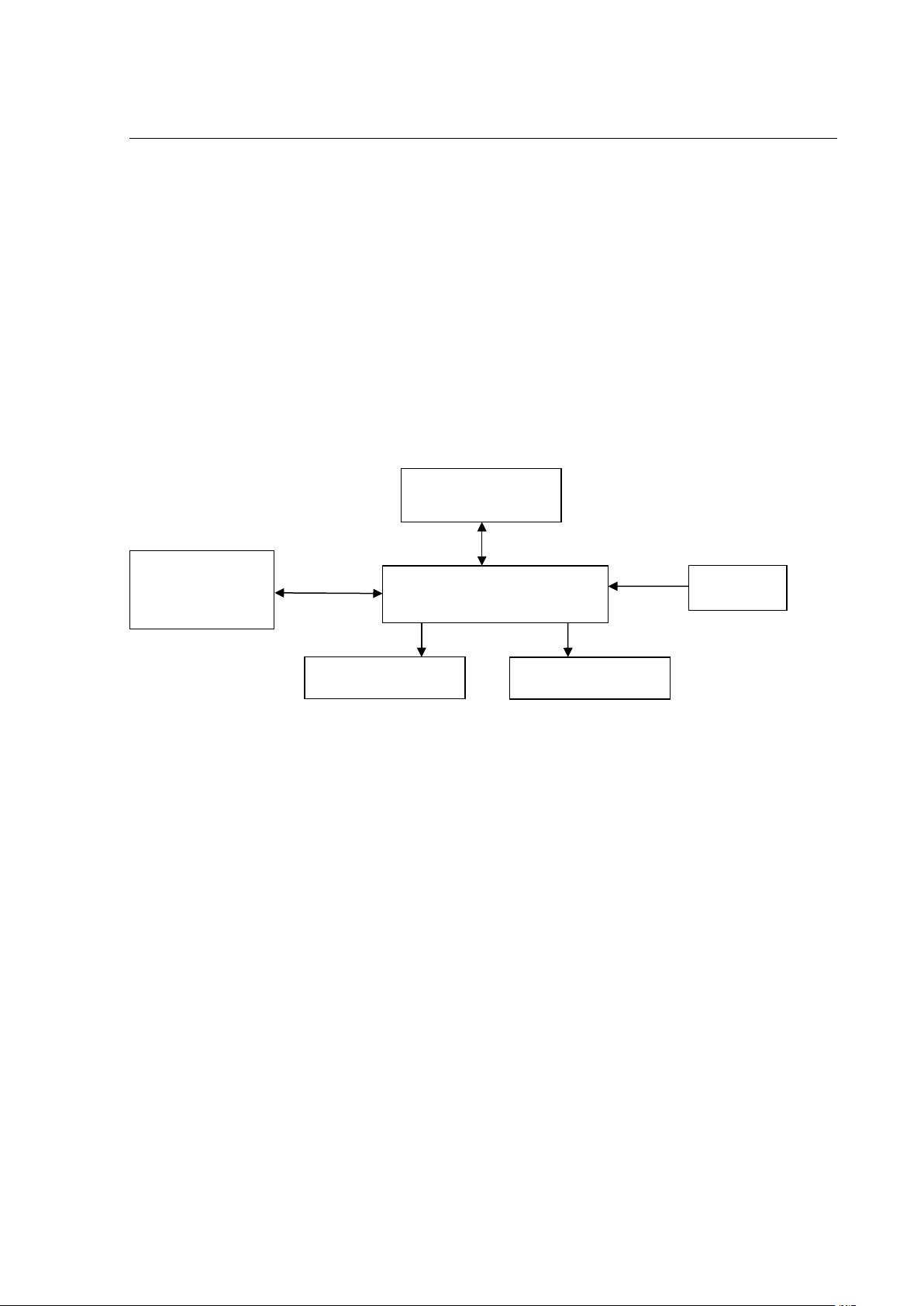
在系统设计部分,文章提到了使用STC89C52单片机作为核心控制器。这种单片机具有较高的处理能力和广泛的适用性,适合于实现复杂的数据处理和控制任务。利用Keil集成开发环境和C语言编写程序,可以实现对GPS数据的接收、解析和处理,确保系统运行的稳定性和效率。
为了提高定位的精度,论文采用了卡尔曼滤波算法进行优化。卡尔曼滤波是一种在线估计系统状态的统计方法,尤其适用于处理带有噪声的测量数据。在GPS定位中,由于大气干扰、多路径效应等因素,原始GPS数据可能存在误差。通过卡尔曼滤波,可以融合多帧数据,减小噪声影响,提高定位精度。
在实际应用中,论文使用MATLAB软件进行仿真测试,验证了改进后的定位算法的有效性。MATLAB是一个强大的数学计算工具,适合进行算法设计、仿真和数据分析,能直观地展示算法性能,为系统设计提供了有力的支持。
关键词包括:GPS、卡尔曼滤波、STC89C52单片机和目标定位算法。这些关键词概括了文章的主要研究内容和技术手段,表明该研究聚焦于利用先进的信号处理技术提升GPS定位系统的性能,以适应救援无人机对精准定位的需求。
这篇论文深入研究了基于GPS技术的救援目标定位系统,通过结合单片机控制、卡尔曼滤波优化和软件仿真,为提高救援效率和精度提供了理论和技术支持。
5
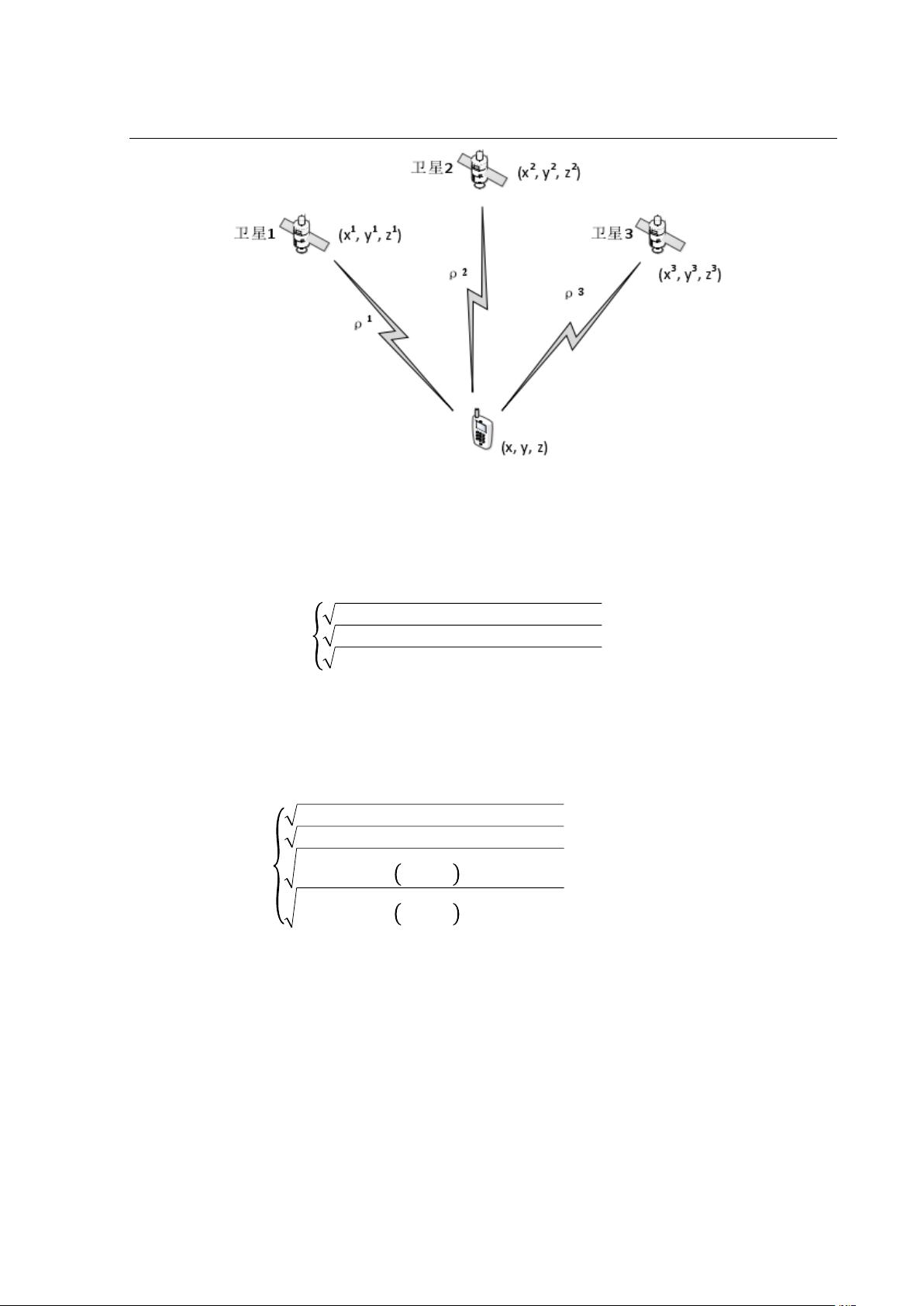
图 2.4 GPS 目标定位原理图
我们将地面观测到 t 时间的 3 个卫星分别命名为 S1、S2、S3,然后建立空间直角坐
标系,分别将三个卫星的坐标系以 X、Y、Z 表示,设空间中的卫星和地面接收机的距
离为ρ1、ρ2、ρ3,列出数学方程(2.1):
(
𝑥
1
―
𝑥)
2
+
(
𝑦
1
―
𝑦)
2
+
(
𝑧
1
―
𝑧)
2
=
𝜌
1
(
𝑥
2
―
𝑥)
2
+
(
𝑦
2
―
𝑦)
2
+
(
𝑧
2
―
𝑧)
2
=
𝜌
2
(
𝑥
3
―
𝑥)
2
+
(
𝑦
3
―
𝑦)
2
+
(
𝑧
3
―
𝑧)
2
=
𝜌
3
(式 2.1)
在理想条件下通过解算上式方程,可以求解得到 GPS 接收机的位置。但在实际计
算时需要将接收机时钟误差考虑进去,最少需要 4 个卫星数据才能将实际的 GPS 地面
接收机定位解算出来,ρ是接收机测量时间乘以光速的已知值。空间卫星实际位置已知。
列数学公式如下(2.2):
(
𝑥
1
―
𝑥)
2
+
(
𝑦
1
―
𝑦)
2
+
(
𝑧
1
―
𝑧)
2
+
𝑐
∙
𝛿
𝑡
𝑢
=
𝜌
1
(
𝑥
2
―
𝑥)
2
+
(
𝑦
2
―
𝑦)
2
+
(
𝑧
2
―
𝑧)
2
+
𝑐
∙
𝛿
𝑡
𝑢
=
𝜌
2
(
𝑥
3
―
𝑥
)
2
+
𝑦
3
―
𝑦
2
+
(
𝑧
3
―
𝑧
)
2
+
𝑐
∙
𝛿
𝑡
𝑢
=
𝜌
3
(
𝑥
4
―
𝑥
)
2
+
𝑦
4
―
𝑦
2
+
(
𝑧
4
―
𝑧
)
2
+
𝑐
∙
𝛿
𝑡
𝑢
=
𝜌
4
(式 2.2)
在(2.2)式中,
𝛿
𝑡
𝑢
乘以 c 代表的是 GPS 接收机的时钟误差和光速的相乘。ρ表示
卫星和接收机的距离。
剩余41页未读,继续阅读
2022-05-27 上传
2022-11-03 上传
2021-10-05 上传
2022-06-02 上传
2022-01-03 上传
2021-10-26 上传

南抖北快东卫
- 粉丝: 78
- 资源: 5587
 我的内容管理
展开
我的内容管理
展开







最新资源
- 磁性吸附笔筒设计创新,行业文档精选
- Java Swing实现的俄罗斯方块游戏代码分享
- 骨折生长的二维与三维模型比较分析
- 水彩花卉与羽毛无缝背景矢量素材
- 设计一种高效的袋料分离装置
- 探索4.20图包.zip的奥秘
- RabbitMQ 3.7.x延时消息交换插件安装与操作指南
- 解决NLTK下载停用词失败的问题
- 多系统平台的并行处理技术研究
- Jekyll项目实战:网页设计作业的入门练习
- discord.js v13按钮分页包实现教程与应用
- SpringBoot与Uniapp结合开发短视频APP实战教程
- Tensorflow学习笔记深度解析:人工智能实践指南
- 无服务器部署管理器:防止错误部署AWS帐户
- 医疗图标矢量素材合集:扁平风格16图标(PNG/EPS/PSD)
- 人工智能基础课程汇报PPT模板下载
