DSpace RTI CAN Multi Message开发配置教程
需积分: 18 7 浏览量
更新于2024-07-06
4
收藏 1.9MB PDF 举报
"dspace RTI开发指南是一个针对HIL(Hardware-in-the-Loop)相关专业人士的教程,主要讲解如何使用dspace系统进行RTI(RTI CAN MultiMessage)的开发和配置。本教程覆盖了从基础模型创建到高级功能应用的全过程,包括数据文件解析、RTICANMM介绍、主块配置、ControlDesk布局生成、CAN信号接口创建、触发机制、信号处理选项以及错误检查等关键环节。"
1. **RTICANMultiMessage**
RTICANMultiMessage是dspace RTI中用于处理CAN(C Controller Area Network)通信的一种工具,它支持高频率的CAN消息交互(超过200条消息)和灵活的CAN矩阵变更。在HIL仿真中,RTICANMM能够动态生成S函数,适应不同ECU版本的CAN通信需求。
2. **HIL(Hardware-in-the-Loop)仿真**
HIL仿真是一种在真实硬件设备与模拟环境之间建立连接的测试方法,允许开发者在不损坏实际设备的情况下测试其控制系统。在汽车电子领域,HIL仿真器常用于测试ECU(Electronic Control Unit)的功能和性能,尤其在需要频繁调整CAN通信参数时,HIL仿真器显得尤为重要。
3. **数据文件和解析器**
数据文件通常以DBC(Deutsches Forschungsnetz, Data Base Container)格式存储CAN网络的信息,如信号定义、帧结构等。解析器用于读取这些数据,并将其转换为可用于RTI模型的格式,以便于快速在线处理。
4. **RTICANMM模型创建**
创建RTICANMM模型是开发过程的第一步,它基于DBC文件或其他数据库信息,为一个CAN通道生成动态的S函数,以实现对CAN通信的模拟。
5. **ControlDesk布局生成**
ControlDesk是dspace的可视化监控和控制界面。在第二步,用户将生成ControlDesk布局,这有助于直观地监控和控制CAN通信,提高工作效率。
6. **CANMM到模型接口**
第三步是创建CANMM到模型的接口,这确保了CANMM生成的数据能正确地映射到仿真模型中,实现信号的双向通信。
7. **信号映射和触发机制**
课程涵盖了信号映射和触发机制的设置,包括基本触发和高级触发选项,允许根据特定条件启动或停止通信,以及对信号进行实时操纵。
8. **信号处理和错误检查**
步骤六和七涉及到信号的修改和错误检查,如CRC(Cyclic Redundancy Check)和自定义代码消息验证,这些都是确保CAN通信可靠性和数据完整性的关键步骤。
9. **原始数据访问和操作**
最后,教程还涉及原始数据的访问和操纵,允许开发者深入到通信的底层,进行更精细的调试和分析。
通过这个dspace RTI开发指南,HIL领域的工程师能够掌握RTICANMM的全面知识,从而高效、准确地构建和配置HIL仿真环境,应对复杂的CAN通信挑战。

18
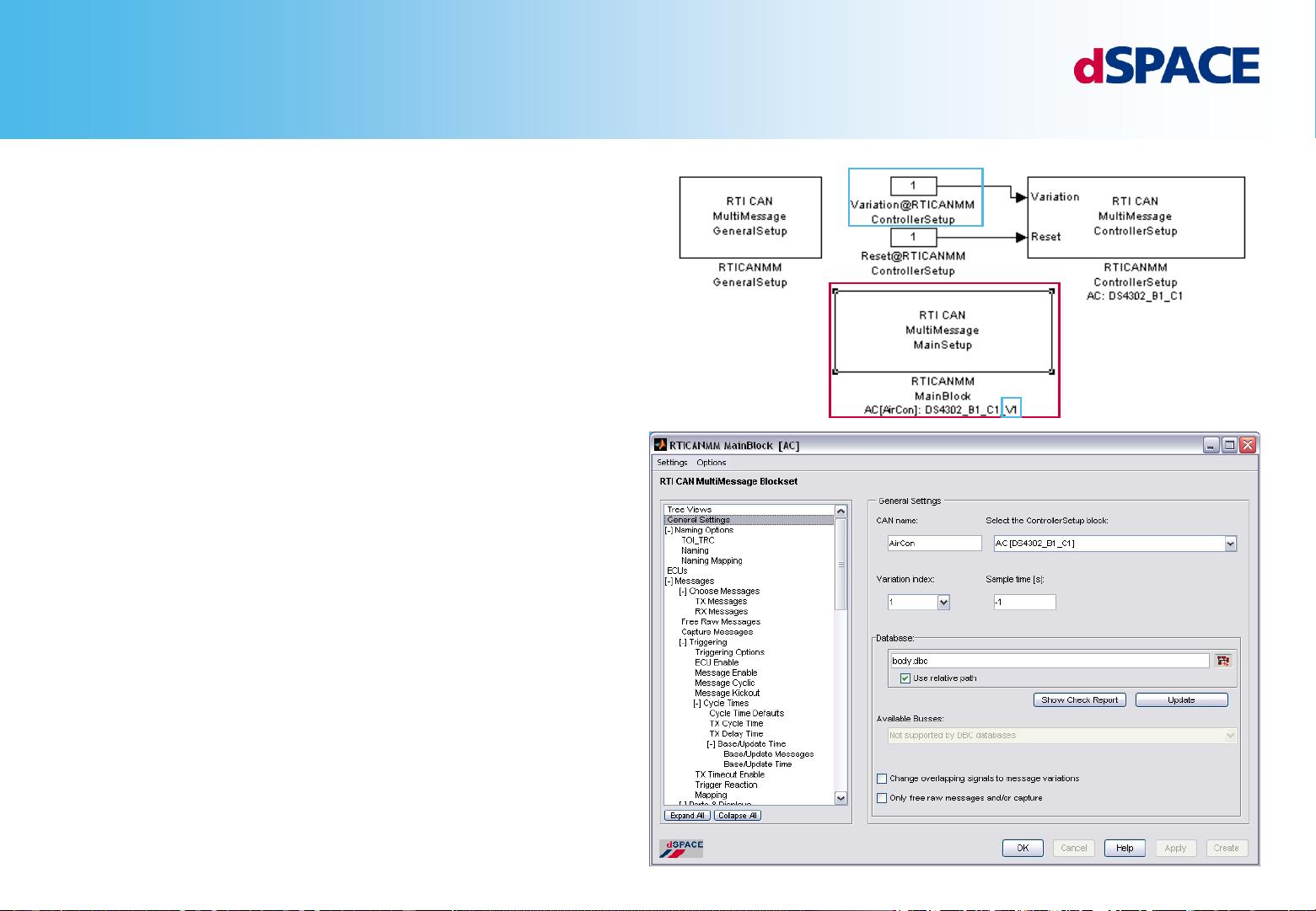
ControllerSetup
No Library Link
Generation of in-/outports according to transceiver
(TJA1041 has special ports)
Settings are stored into block’s mask
Ports
Variation index (uint8)
To select a corresponding Main block
The settings in the Main block determines the
communication behavior of the controller
Reset (Boolean)
Additional ports for TJA1041
Note
The RTICANMM Blockset is no library !
Advantage:
Possibility to create complex SIMULINK structures
below block mask



剩余130页未读,继续阅读
2021-02-18 上传
点击了解资源详情
2023-08-29 上传
2023-08-22 上传
2021-05-18 上传
2021-04-30 上传
2019-08-24 上传

benhai003
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 平尾装配工作平台运输支撑系统设计与应用
- MAX-MIN Ant System:用MATLAB解决旅行商问题
- Flutter状态管理新秀:sealed_flutter_bloc包整合seal_unions
- Pong²开源游戏:双人对战图形化的经典竞技体验
- jQuery spriteAnimator插件:创建精灵动画的利器
- 广播媒体对象传输方法与设备的技术分析
- MATLAB HDF5数据提取工具:深层结构化数据处理
- 适用于arm64的Valgrind交叉编译包发布
- 基于canvas和Java后端的小程序“飞翔的小鸟”完整示例
- 全面升级STM32F7 Discovery LCD BSP驱动程序
- React Router v4 入门教程与示例代码解析
- 下载OpenCV各版本安装包,全面覆盖2.4至4.5
- 手写笔画分割技术的新突破:智能分割方法与装置
- 基于Koplowitz & Bruckstein算法的MATLAB周长估计方法
- Modbus4j-3.0.3版本免费下载指南
- PoqetPresenter:Sharp Zaurus上的开源OpenOffice演示查看器
