五自由度串联机器人静力学与刚度分析
版权申诉
129 浏览量
更新于2024-07-04
收藏 399KB DOCX 举报
"该文档详细分析了五自由度串联机器人的静力学和刚度特性,旨在理解并计算机器人各关节驱动力与外力的关系,同时求取刚度和柔度矩阵。研究过程中,团队成员分工合作,分别完成了建模、运动学仿真、雅可比矩阵的计算与验证、奇异位形分析等工作。文档内容涵盖项目背景、静力学和刚度分析的基础理论、静力学分析方法以及刚度柔度计算。通过静力学分析,确定机器人的受力状态,为设计和优化提供依据;而刚度分析则关乎机器人的稳定性与精度,对于理解和改善机器人的动态性能至关重要。"
文档深入探讨了五自由度串联机器人分析的关键知识点:
1. **项目背景**:项目专注于五自由度机械手的静力学和静刚度分析,目标是确定关节驱动力与外部载荷的关联,并构建刚度和柔度矩阵。团队成员分工协作,已完成模型构建、运动仿真、雅可比矩阵推导及验证等工作。
2. **静力学和刚度分析基础**:介绍静力学的基本原理,包括隔离体图、静力平衡条件和静力平衡方程。静力平衡方程分为构件平衡方程和迭代求解方法,同时也涉及基于虚功原理的静力学分析。
3. **静力学分析**:这部分主要讨论连杆的受力情况和力雅克比的推导,为求解关节驱动力提供理论支持。
4. **刚度和柔度**:连杆的变形分析是刚度研究的重要部分,刚度和柔度矩阵的计算对理解机器人的动态响应和稳定性至关重要。
5. **研究内容**:主要包括文献调研,静力学分析以获取驱动力与外力关系,以及静刚度分析以确定刚度和柔度矩阵。此外,还涉及到寻找更有效的分析方法。
6. **串联机器人的特点**:串联机器人驱动力通过单一运动链传递,静力学研究需考虑各关节和末端执行器的受力情况。
7. **静力学的意义**:静力学分析有助于设计合理构件尺寸,选择合适驱动器,确保机器人在静态条件下能保持平衡。
8. **刚度分析的重要性**:刚度分析影响机器人的动态性能,如稳定性、精度和响应速度,对实际应用具有指导价值。
通过上述分析,该文档为理解五自由度串联机器人的运动特性、结构优化和控制策略提供了详实的理论基础和计算方法。
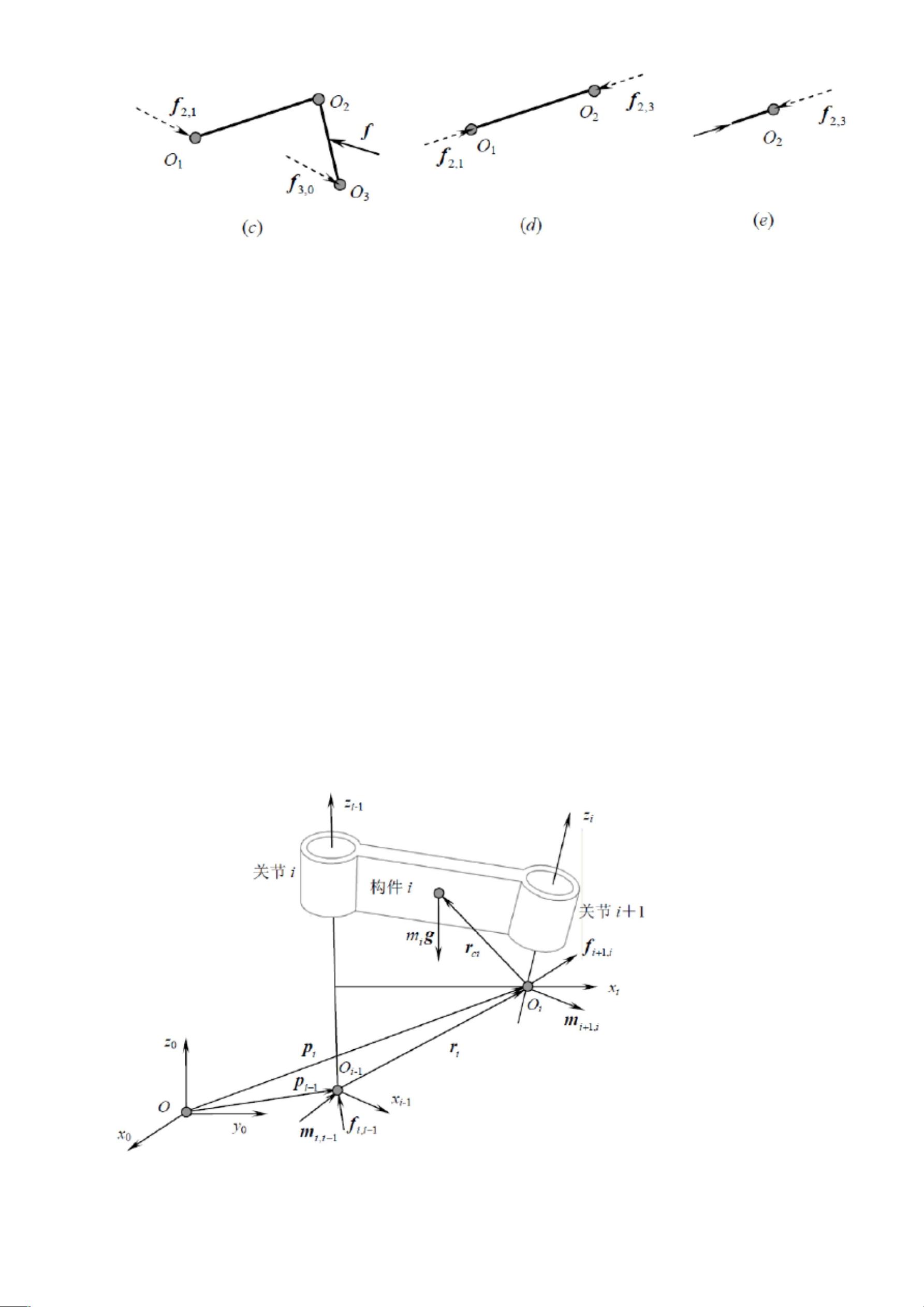
图 2.1 平面四杆机构的隔离体图
0
对于一个处于静力平衡的隔离体,所有外力的矢量和应等于 ,相对于任意点的所有力矩的矢量和也必
0
须等于 。这个条件称为静力平衡条件,可表示为
f
0
m
0
对于平面机构,式
程。求解这些方程就可以获得所有关节上的力和力矩。
2.2.2 静力平衡方程
2.2.2.1 构件的静力平衡方程
1 2
在开环机构中,每个构件均通过关节与 个或 个其它构件相连接,下面就根据上节介绍的静力平衡条
i
件,推导构件上的静力平衡方程。图
表示作用于一个典型构件上的力和力矩。构件 通过关节 i 和
i 1
o
相连。可以将构件 i 对构件
的作用归结为关于坐标系
i i
f 和合力矩 m 。同样,构件 i 1 作用于构件 i 上的力可以归结为关于坐标系 o
i1,i
i1,i i1 i1
i,i1
2.2
图
5
剩余21页未读,继续阅读
2022-10-24 上传
2023-07-11 上传
2022-05-13 上传
2023-03-01 上传
2023-02-16 上传
2022-11-05 上传
2021-09-27 上传
2023-02-27 上传
2022-05-23 上传

春哥111
- 粉丝: 1w+
- 资源: 6万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- cadastro-de-funcionarios:使用Python语言制作了小玩意儿,Qt Designer用于开发接口,MongoDB用于数据存储
- contactkeeper
- torch_sparse-0.6.12-cp36-cp36m-linux_x86_64whl.zip
- 保险科技案例报告-栈略数据:一栈式保险风控服务提供商,专注健康险风控领域2021.rar
- akslides:我的幻灯片,Markdown内容以及使用reveal.js进行渲染
- status.todoparrot.com:TODOParrot.com 的状态 API
- 城市:简单的城市应用程序,用于练习创建PostgreSQL数据库和使用Postico处理数据
- next-responsive-navbar
- SDL:CSC221@城市学院
- onnxjs_test
- myportfolio:关于我的一瞥
- 打乱
- fedora-accounts-docs:Fedora帐户文档
- 美食网站模版
- ANNOgesic-1.0.19-py3-none-any.whl.zip
- 零基础入门NLP - 新闻文本分类-数据集
