PID控制器详解:参数意义与整定技巧
"PID参数的意义与整定方法"
PID(比例-积分-微分)控制器是自动控制领域中广泛应用的一种控制算法,它通过调整三个参数(比例P、积分I和微分D)来优化系统的响应。这篇文章由廖常初(来自重庆大学)介绍了PID控制器的主要参数及其整定方法,并通过仿真实验验证了这种方法的有效性。
1. PID控制器的数学表达式
PID控制器的输出是误差ev(t)、误差积分和误差微分的加权和。公式(1)显示了这一关系,其中Kp是比例系数,Ti是积分时间,Td是微分时间,Ki和Kd分别是积分和微分部分的比例系数,且通常Ki = Kp * Ti,Kd = Kp * Td。比例项对当前误差做出反应,积分项考虑了过去的误差积累,微分项则预估未来误差变化趋势。
2. 闭环控制的主要性能指标
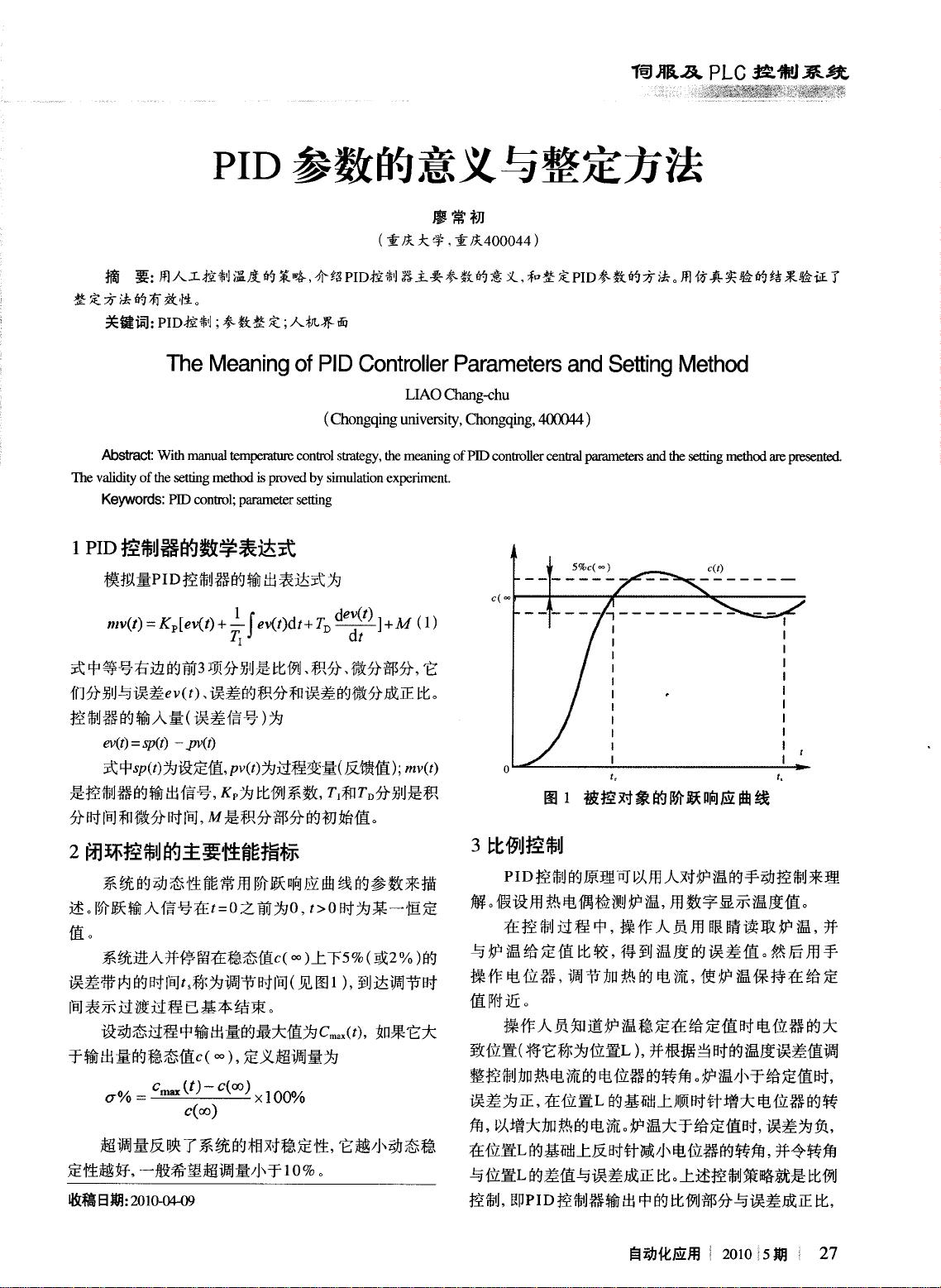
评价一个PID控制系统的性能,通常依据阶跃响应曲线的参数,如调节时间tr和超调量σ。调节时间是从阶跃输入信号施加到系统后,输出量进入并保持在稳态值±5%(或2%)误差带内的持续时间。超调量则是系统响应峰值与稳态值之差占稳态值的百分比,反映了系统的动态稳定性。理想的系统应具有快速的调节时间和较小的超调量。
3. PID参数整定方法
整定PID参数通常涉及试错法、经验法或基于控制理论的计算方法。试错法是通过手动调整参数,观察系统响应并逐步优化;经验法则基于特定类型的系统,提供了一些通用的参数设置规则;而计算方法则基于系统模型,使用如Ziegler-Nichols或其他算法来计算初始参数。
4. 仿真实验与验证
通过仿真实验,可以测试不同参数设置下的系统响应,以确认参数整定的有效性。这种实验能够安全、经济地探索各种控制策略,而不会影响实际设备。文章中提到的仿真实验结果证明了所介绍的PID参数整定方法能够达到良好的控制效果。
总结来说,理解和正确整定PID参数对于设计和优化自动化控制系统至关重要。通过适当的选择和调整比例、积分和微分参数,可以实现快速、稳定且无超调的系统响应,从而提高控制系统的性能。
伺 服 及 PLC 控 制 系 统
PID参数的意义与整定方法
廖 常 初
(重庆大 学,重庆400044)
摘 要:用人工控制温度的策略,介绍PID控制器主要参数的意义,和整定PID参 数的方法。用仿真实验的结果验证 了
整 定 方 法 的 有 效 性 。
关键 词:PID控制 ;参数整定 ;人 机界 面
The Meaning of PID Controller Parameters and Setting Method
LIAO Chang-chu
(Chongqinguniversity,Chongqing,4OO(O4)
Abstract:W ithmanualtemperaturecontrol strategy,themeaningofPID conlrollercentralparametersandthe settingmethodarepresented.
Thevalidityofthesettingmethod isprovedby simulationexpe riment.
Keywords:P]D control;parameter setting
1 PID控制器的数学表达式
模拟量PID控制器的输 出表达式为
)= + )df+ 】+ (1)
式中等号右边的前3项分别是比例、积分、微分部分,它
们分别与误差ev(t)、误差的积分和误差的微分成正比。
控 制器 的输入量(误差信号 )为
ev(t)=sp(t)一, V(D
式中sp(t)为设定值,pv(t)为过程变量(反馈值);mv(t)
是控制器的输出信号, 为比例系数, 和丁。分别是积
分时间和微分 时间, 是积分部分的初始值 。
2闭环控制的主要性能指标
系统 的动态 性能常用 阶跃 响应 曲线 的参数 来描
述 。阶跃输入信号在 t=0之 前为0,f>0时为某一恒 定
值 。
系统进入并停留在 稳态值C(co)上下5%(或2% )的
误差带 内的时间t 称为调节时间(见 图1),到达调节 时
间表示 过渡 过 程已基 本结束 。
设动态过程中输出量的最大值为C (f),如果它大
于输出量的稳态值C(oo),定义超调量为
%:! 坚 ! 二 竺 ×100%
(∞)
超调量反 映了系统的相对稳定性,它越小动 态稳
定性越好,一般希望超调量小于10%。
收稿 日期:2010-04-09
…
r 5% c
一
(÷ … 一一
tr f
图 1 被控对 象 的阶跃 响应曲线
3比例控制
PID控制的原理 可以用人对炉温的手动控 制来理
解。假设用热 电偶检测炉温,用数字显示温度值 。
在控 制 过 程 中,操作 人 员 用 眼睛读 取 炉温 ,并
与炉 温 给定值 比较 ,得 到 温度 的误 差值 。然 后用 手
操 作 电位 器 ,调 节 加热 的 电流 ,使炉 温保 持在 给 定
值 附 近 。
操作人员知道 炉温稳定在给定值 时 电位器 的大
致位置(将它称为位置L),并根据 当时的温度误差值调
整控制加热电流的电位器的转角。炉温小于给定值时,
误差为正,在位置 L的基础上 顺时针增 大电位器 的转
角,以增大加热的电流 。炉温大于给定值时,误差为负,
在位置L的基础上反时针减小 电位器的转角,并令转角
与位置L的差值与误差成正比。上述控制策略就是 比例
控 制,即PID控制器输出中的比例部分与误差成正 比,
自动化应用 2010 5期 i 27
下载后可阅读完整内容,剩余3页未读,立即下载
2018-05-21 上传
2022-08-02 上传
2021-10-01 上传
2020-12-09 上传
2021-06-29 上传
2009-06-29 上传

Bionic-Hand
- 粉丝: 2
- 资源: 34
 我的内容管理
展开
我的内容管理
展开







最新资源
- 深入浅出:自定义 Grunt 任务的实践指南
- 网络物理突变工具的多点路径规划实现与分析
- multifeed: 实现多作者间的超核心共享与同步技术
- C++商品交易系统实习项目详细要求
- macOS系统Python模块whl包安装教程
- 掌握fullstackJS:构建React框架与快速开发应用
- React-Purify: 实现React组件纯净方法的工具介绍
- deck.js:构建现代HTML演示的JavaScript库
- nunn:现代C++17实现的机器学习库开源项目
- Python安装包 Acquisition-4.12-cp35-cp35m-win_amd64.whl.zip 使用说明
- Amaranthus-tuberculatus基因组分析脚本集
- Ubuntu 12.04下Realtek RTL8821AE驱动的向后移植指南
- 掌握Jest环境下的最新jsdom功能
- CAGI Toolkit:开源Asterisk PBX的AGI应用开发
- MyDropDemo: 体验QGraphicsView的拖放功能
- 远程FPGA平台上的Quartus II17.1 LCD色块闪烁现象解析
