卡尔曼滤波详解与MATLAB实战教程
卡尔曼滤波是一种经典的线性滤波算法,它在许多工程领域中被广泛应用,尤其在信号处理、控制系统和导航系统中,以其最小均方误差的特性而著称。本文档旨在通过一个实际的入门实验,引导读者理解和掌握卡尔曼滤波的基本概念、递推过程及其在MATLAB中的实现。
实验的主要目标包括理解卡尔曼滤波的准则,即在给定状态方程和观测数据的情况下,如何估计信号的当前值以实现最佳线性预测。卡尔曼滤波的核心在于状态方程(预测模型)和观测方程(更新模型),它们描述了信号随时间变化的状态和测量数据之间的关系。
状态方程和测量方程是设计卡尔曼滤波器的基础,通常假设这些方程已知。实验中使用的系统模型是一个动态系统,其状态变量随时间演化遵循某个特定的线性关系,同时给出了初始条件和噪声模型。观测模型则描述了系统的输出与状态之间的关联,以及噪声的特性。
卡尔曼滤波的递推过程涉及到四个关键步骤:预测、更新、预估状态和协方差矩阵。预测阶段使用状态方程和上一时刻的估计值来预测当前状态,然后通过观测数据的更新,计算卡尔曼增益矩阵,该矩阵在优化估计中起到关键作用。通过迭代这些步骤,滤波器可以逐步逼近真实状态,并最小化误差。
在MATLAB环境中,实验者可以利用这个工具箱来编程实现卡尔曼滤波的递推计算。具体的步骤包括输入初始状态和噪声模型参数,利用卡尔曼滤波公式(1)至(4)依次计算预测状态、预测误差、卡尔曼增益矩阵以及最终的估计状态。这个过程中,MATLAB的矩阵运算功能使得复杂计算变得直观和高效。
实验内容要求求解卡尔曼滤波器的表达形式,并计算最优估计值。这涉及求解卡尔曼增益矩阵,这有助于找到在观测数据条件下改善状态估计的最佳权衡。整个过程强调了理论知识的实际运用,以及MATLAB作为一种强大的工具在实际工程问题中的作用。
总结来说,通过这个实验,学习者不仅能够深入理解卡尔曼滤波的工作原理,还能掌握如何在MATLAB中实施和优化这种滤波算法,这对于在实际工程任务中处理噪声和不确定性数据至关重要。
实验一 卡尔曼滤波
一、 实验目的
1、了解卡尔曼滤波的准则和信号模型,以及卡尔曼滤波的应用。
2、熟练掌握卡尔曼滤波的递推过程,提高对信号进行处理的能力。
3、分析讨论实际状态值和估计值的误差。
二、实验原理
1、卡尔曼滤波简介
卡尔曼滤波是解决以均方误差最小为准则的最佳线性滤波问题,它根据 前
一个估计值和最近一个观察数据来估计信号的当前值。它是用状态方程和递推
方法进行估计的,而它的解是以估计值(常常是状态变量的估计值)的形式给
出其信号模型是从状态方程和量测方程得到的。
卡尔曼过滤中信号和噪声是用状态方程和测量方程来表示的。因此设计卡
尔曼滤波器要求已知状态方程和测量方程。它不需要知道全部过去的数据,采
用递推的方法计算,它既可以用于平稳和不平稳的随机过程,同时也可以应用
解决非时变和时变系统,因而它比维纳过滤有更广泛的应用。
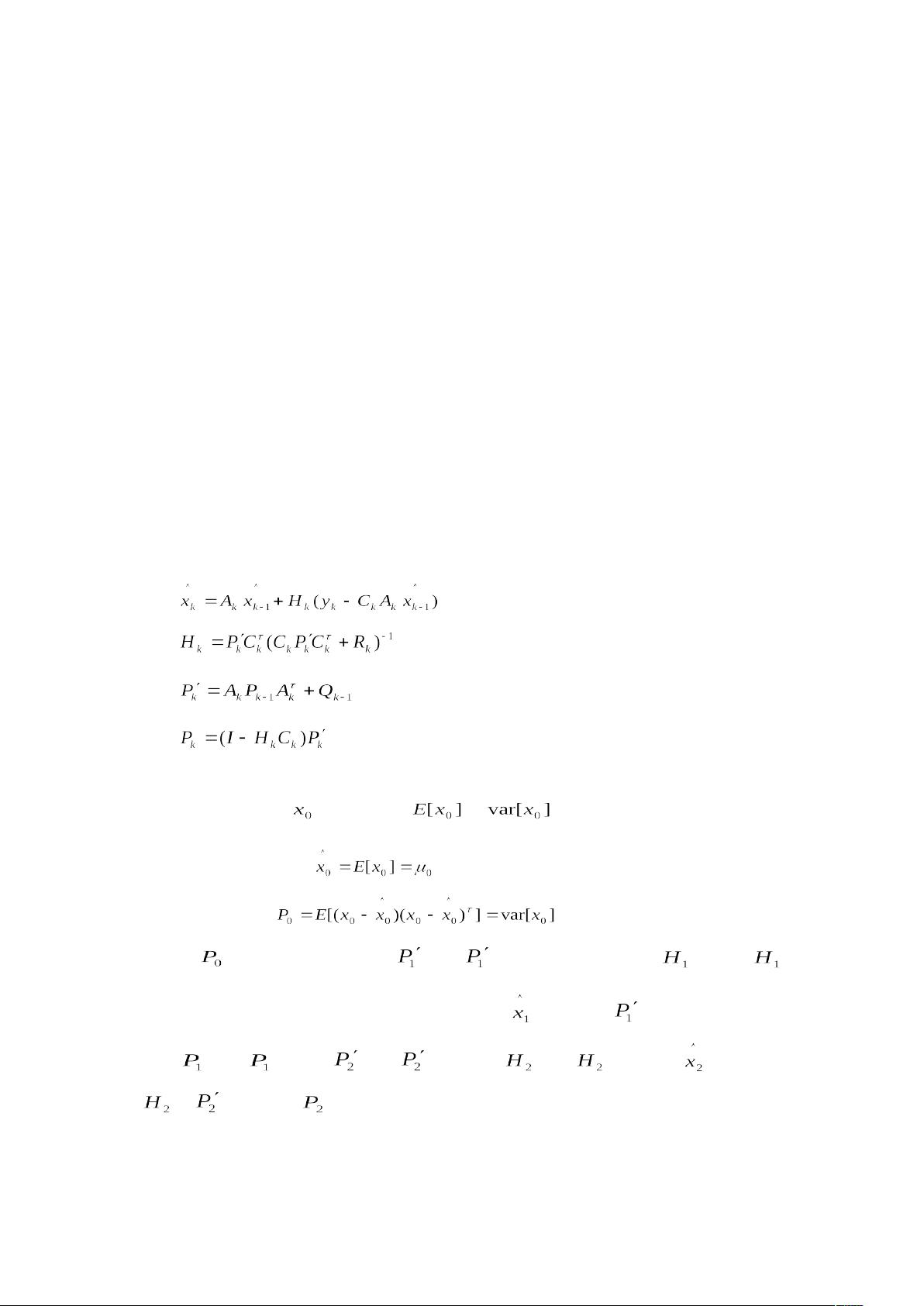
2、卡尔曼滤波的递推公式
………(1)
………(2)
………(3)
………(4)
3、递推过程的实现
如果初始状态 的统计特性 及 已知,并
令
又
将 代入式(3)可求得 ,将 代入式(2)可求得 ,将此
代入式(1)可求得在最小均方误差条件下的 ,同时将 代入式(4)又可
求得 ;由 又可求 ,由 又可求得 ,由 又可求得 ,同时由
与 又可求得 ……;以此类推,这种递推计算方法用计算机计算十分
方便。
下载后可阅读完整内容,剩余7页未读,立即下载
2018-02-06 上传
点击了解资源详情
点击了解资源详情
2021-09-10 上传
2013-02-15 上传
2022-07-15 上传

神霸
- 粉丝: 1
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- sls-nodejs-template:具有ES6语法的无服务器模板
- Santander Product Recommendation 桑坦德产品推荐-数据集
- Zigbee-CC2530实验03SYSCLOCK&POWERMODE实现睡眠定时器
- stocks-ticker:电子垂直股票代号
- grow-together:寻求向孩子介绍新技术,人文和文化的新颖方法
- 软件串口监视AccessPort
- Accuinsight-1.0.5-py2.py3-none-any.whl.zip
- GUI 中的拖动线:GUI 中的线可以拖动-matlab开发
- TextEncryption
- A3JacobDumas.appstudio
- Horiseon:地平线
- 串口通讯ET 200S 1SI模块应用范例.rar
- Nicky Jam Search-crx插件
- SymbolsVideo:SVG中的Symbols视频触发器
- C#桌面程序 获取机器码(CPU信息+硬盘信息+网卡信息)
- US Candy Production by Month 美国糖果月产量-数据集
