无人驾驶:控制与规划关键技术解析
需积分: 15 170 浏览量
更新于2024-07-18
1
收藏 2.89MB PDF 举报
无人驾驶中的控制和规划是实现自动化驾驶的关键技术,它涉及车辆的智能决策、路径规划以及与环境的交互。本文将深入探讨无人驾驶结构设计的核心组成部分,包括平台运行环境、用户需求、行为决策与规划、传感器系统、控制系统设计等。
首先,无人驾驶结构设计包含了以下几个关键要素:
1. 平台运行环境:无人驾驶汽车需要在复杂的交通环境中运行,包括道路、行人、其他车辆和静态/动态障碍物。这要求车辆具备高度适应性和安全性。
2. 用户:乘客的安全和舒适性是设计的重要考量,可能包括乘客指令、紧急情况处理等。
3. 行为决策与规划:车辆需要能做出实时的路径选择和避障决策,这依赖于先进的路径规划算法,如A*、Dijkstra等。
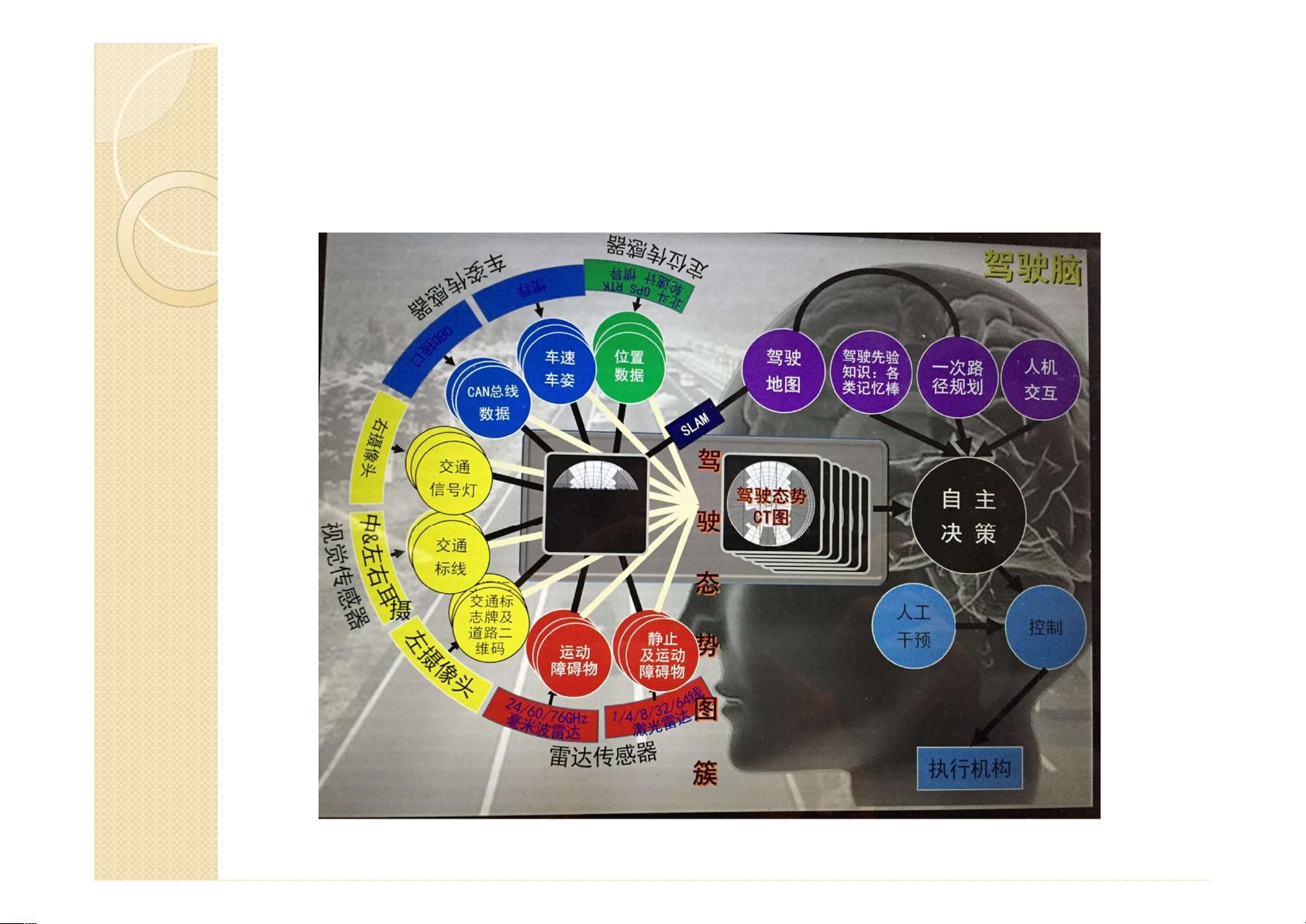
4. 环境感知传感器:激光雷达、摄像头、毫米波雷达等设备用于收集周围环境信息,提供实时路况数据。
5. 定位定向传感器(如GPS和惯性测量单元)确保车辆准确地确定位置和方向。
6. 自主运动控制系统:根据控制目标和传感器输入,执行精确的车辆动作,如伺服控制和动力学控制。
无人驾驶控制系统设计具体包括:
1. 控制系统的结构设计:设计包括了控制目标设定,如保持车辆稳定行驶、精准转向等。它需要考虑车辆的机构模型,如伺服控制来实现精确的机械动作,以及运动模型,如动力学控制来处理车辆的动力学行为。
2. 几何模型控制:例如跟踪控制,通过控制方向和速度来实现对预定路径的精确跟随。在高速行驶时,需要考虑车辆侧滑问题,通过阿克曼转向几何模型进行修正。
3. 转向控制:使用期望转向曲线生成器,根据当前车辆状态和目标路径,计算出所需的转向操作。
路径规划系统设计则是另一个核心环节,它基于车辆的当前位置、目标位置以及实时环境信息,生成安全、高效的行驶路线。这可能涉及到路径优化算法,以最小化时间、距离或能耗,同时满足交通规则和避障需求。
无人驾驶的控制和规划技术是一项集成多学科知识的复杂任务,涉及硬件、软件和算法的协同工作,旨在实现安全、可靠的自动驾驶体验。随着技术的进步,这些系统将不断优化和完善,推动无人驾驶汽车行业的快速发展。
无人驾驶结构设计
剩余26页未读,继续阅读
773 浏览量
254 浏览量
1544 浏览量
2213 浏览量
基于MPC控制的自定义路径跟踪算法:无人驾驶汽车的路径规划与横向控制优化,基于mpc控制的路径跟踪算法 可以自定义路径#MPC #LQR #无人驾驶,carsim,MPC横向控制,PID速度控制,路径
2025-01-27 上传
2022-07-14 上传
134 浏览量
302 浏览量

羽青珂
- 粉丝: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 全面详实的大学生电工实习报告汇总
- 利用极光推送实现App间的消息传递
- 基于JavaScript的节点天气网站开发教程
- 三星贴片机1+1SMT制程方案详细介绍
- PCA与SVM结合的机器学习分类方法
- 钱能版C++课后习题完整答案解析
- 拼音检索ListView:实现快速拼音排序功能
- 手机mp3音量提升神器:mp3Trim使用指南
- 《自动控制原理第二版》习题答案解析
- 广西移动数据库脚本文件详解
- 谭浩强C语言与C++教材PDF版下载
- 汽车电器及电子技术实验操作手册下载
- 2008通信定额概预算教程:快速入门指南
- 流行的表情打分评论特效:实现QQ风格互动
- 使用Winform实现GDI+图像处理与鼠标交互
- Python环境配置教程:安装Tkinter和TTk
