长序列结构化状态空间S4:大语言模型的新解决方案
需积分: 0 196 浏览量
更新于2024-06-13
收藏 3.23MB PDF 举报
长文本序列的结构化状态空间(Structured State Space, SSM)是一种新兴的模型框架,旨在解决序列数据处理中的核心问题,尤其是应对跨越多种模态和任务的长期依赖性。传统的模型如循环神经网络(RNN)、卷积神经网络(CNN)和Transformer虽然各有针对长距离依赖的特殊变体,但在处理超过10000步的极长序列时,仍然面临计算和内存效率的挑战。
在近期的研究中,一种创新的方法提出将序列建模为状态空间模型的形式:x'(t) = Ax(t) + Bu(t),y(t) = Cx(t) + Du(t),其中x(t)表示状态向量,u(t)是输入,A、B、C和D是相应的矩阵。这种方法理论上能够有效地捕捉和表达复杂的长期依赖关系。然而,其计算复杂度和内存需求非常高,这使得它在作为通用序列建模工具时显得不切实际。
为了克服这一限制,我们提出了Structured State Space Sequence Model (S4),它建立在一个新颖的状态参数化之上。S4的关键创新在于对状态矩阵A进行更高效的设计,通过引入结构化的状态空间,不仅降低了计算负担,还能够减少所需的存储资源。这种结构化方法允许模型在保持对长程依赖的有效捕捉的同时,保持在实际应用中的可行性。
S4的优势在于:
1. **模型效率**:通过优化状态更新规则和矩阵分解技术,S4能够在保持模型表达力的同时,显著减少计算步骤和所需的内存空间,使得处理超长序列成为可能。
2. **泛化能力**:由于采用了统一的框架,S4能够适应各种序列数据,无论是文本、音频还是视频,都能通过适当的输入映射矩阵C和D进行处理。
3. **可扩展性**:S4的结构设计使得模型容易进行并行化和分布式计算,进一步提升了处理大规模数据的能力。
4. **易用性**:S4的设计考虑到了实际应用的便利性,使得模型训练和部署更为简洁,这对于研究人员和工程师来说是一个重要的优点。
5. **理论支持**:尽管是基于现有理论的拓展,S4的研究也深入探讨了如何通过状态空间模型的数学特性来理解和改进长序列的学习性能。
长文本序列的结构化状态空间模型(S4)是现代序列建模领域的一个重要突破,它提供了一种有效且可扩展的方式来处理具有挑战性的长距离依赖问题,有望在未来的大规模语言模型和毕业设计项目中发挥关键作用。
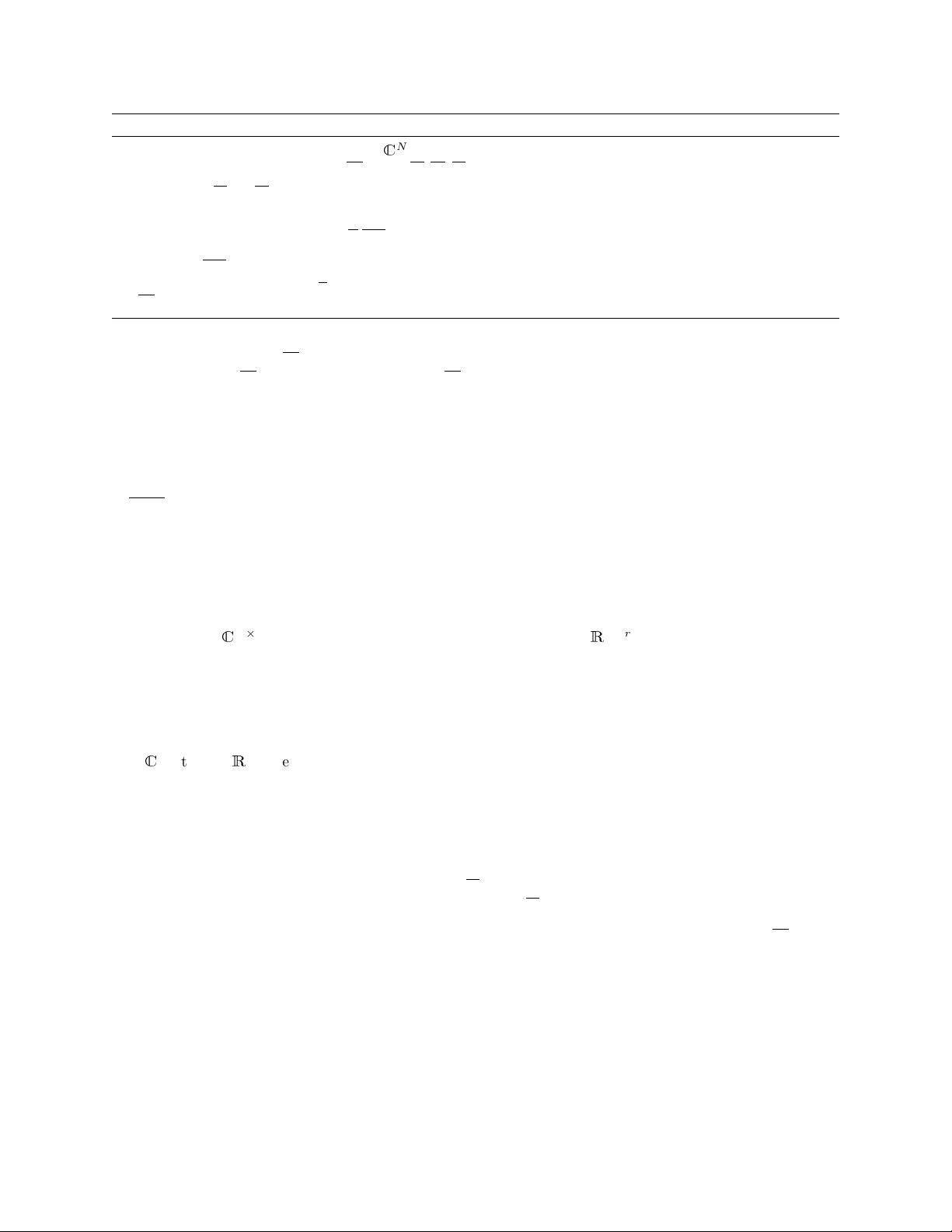
Algorithm 1 S4 Convolution Kernel (Sketch)
Input: S4 parameters Λ, P , Q, B, C ∈
C
N
and step size ∆
Output: SSM convolution kernel K = K
L
(A, B, C) for A = Λ − P Q
∗
(equation (5))
1:
e
C ←
I − A
L
∗
C Truncate SSM generating function (SSMGF) to length L
2:
k
00
(ω) k
01
(ω)
k
10
(ω) k
11
(ω)
←
h
e
C Q
i
∗
2
∆
1−ω
1+ω
− Λ
−1
[B P ] Black-box Cauchy kernel
3:
ˆ
K(ω) ←
2
1+ω
k
00
(ω) − k
01
(ω)(1 + k
11
(ω))
−1
k
10
(ω)
Woodbury Identity
4:
ˆ
K = {
ˆ
K(ω) : ω = exp(2πi
k
L
)} Evaluate SSMGF at all roots of unity ω ∈ Ω
L
5: K ← iFFT(
ˆ
K) Inverse Fourier Transform
•
Instead of computing
K
directly, we compute its spectrum by evaluating its
truncated generating
function
P
L−1
j=0
K
j
ζ
j
at the roots of unity ζ. K can then be found by applying an inverse FFT.
•
This generating function is closely related to the matrix resolvent, and now involves a matrix inverse
instead of power. The low-rank term can now be corrected by applying the
Woodbury identity
which
reduces (A + P Q
∗
)
−1
in terms of A
−1
, truly reducing to the diagonal case.
•
Finally, we show that the diagonal matrix case is equivalent to the computation of a
Cauchy kernel
1
ω
j
−ζ
k
, a well-studied problem with stable near-linear algorithms [30, 31].
Our techniques apply to any matrix that can be decomposed as Normal Plus Low-Rank (NPLR).
Theorem 1. All HiPPO matrices from [16] have a NPLR representation
A = V ΛV
∗
− P Q
>
= V (Λ − (V
∗
P ) (V
∗
Q)
∗
) V
∗
(6)
for unitary
V ∈
C
N×N
, diagonal
Λ
, and low-rank factorization
P , Q ∈
R
N×r
. These matrices HiPPO- LegS,
LegT, LagT all satisfy r = 1 or r = 2. In particular, equation (2) is NPLR with r = 1.
3.3 S4 Algorithms and Computational Complexity
By equation
(6)
, note that NPLR matrices can be conjugated into diagonal plus low-rank (DPLR) form (now
over
C
instead of
R
). Theorems 2 and 3 describe the complexities of SSMs where
A
is in DPLR form. S4 is
optimal or near-optimal for both recurrent and convolutional representations.
Theorem 2
(S4 Recurrence)
.
Given any step size ∆, computing one step of the recurrence
(3)
can be done
in O(N) operations where N is the state size.
Theorem 2 follows from the fact that the inverse of a DPLR matrix is also DPLR (e.g. also by the Woodbury
identity). This implies that the discretized matrix
A
is the product of two DPLR matrices and thus has
O(N) matrix-vector multiplication. Appendix C.2 computes A in closed DPLR form.
Theorem 3
(S4 Convolution)
.
Given any step size ∆, computing the SSM convolution filter
K
can be
reduced to 4 Cauchy multiplies, requiring only
e
O(N + L) operations and O(N + L) space.
Appendix C, Definition 3 formally defines Cauchy matrices, which are related to rational interpolation
problems. Computing with Cauchy matrices is an extremely well-studied problem in numerical analysis,
with both fast arithmetic and numerical algorithms based on the famous Fast Multipole Method (FMM)
[
29
,
30
,
31
]. The computational complexities of these algorithms under various settings are described in
Appendix C, Proposition 5.
We reiterate that Theorem 3 is our core technical contribution, and its algorithm is the very motivation of
the NPLR S4 parameterization. This algorithm is formally sketched in Algorithm 1.
6
剩余31页未读,继续阅读
345 浏览量
196 浏览量
328 浏览量
2025-02-28 上传
345 浏览量
141 浏览量
490 浏览量
1222 浏览量
2011 浏览量

weixin_39994582
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- 自动生成CAD模型文件的测试流程
- 掌握JavaScript中的while循环语句
- 宜科高分辨率编码器产品手册解析
- 探索3CDaemon:FTP与TFTP的高效传输解决方案
- 高效文件对比系统:快速定位文件差异
- JavaScript密码生成器的设计与实现
- 比特彗星1.45稳定版发布:低资源占用的BT下载工具
- OpenGL光源与材质实现教程
- Tablesorter 2.0:增强表格用户体验的分页与内容筛选插件
- 设计开发者的色值图谱指南
- UYA-Grupo_8研讨会:在DCU上的培训
- 新唐NUC100芯片下载程序源代码发布
- 厂家惠新版QQ空间访客提取器v1.5发布:轻松获取访客数据
- 《Windows核心编程(第五版)》配套源码解析
- RAIDReconstructor:阵列重组与数据恢复专家
- Amargos项目网站构建与开发指南
