PCA82C250 CAN控制器接口规格说明
需积分: 3 89 浏览量
更新于2025-01-04
收藏 103KB PDF 举报
"CAN总线协议资料,包括PCA82C250 CAN控制器接口的详细规格"
在工业自动化、汽车电子系统以及其他多种领域中,CAN(Controller Area Network)总线协议扮演着至关重要的角色。BOSCH公司最初设计CAN总线是为了满足汽车行业的通信需求,但随着时间的发展,其广泛应用到更多行业,得益于其高效能和高可靠性。
CAN总线协议的核心特性在于它支持多主机通信,允许网络中的多个设备共享同一通信线路,同时确保数据传输的准确性和实时性。其工作原理基于两线制差分信号,能够有效抵抗电磁干扰(EMI)和射频干扰(RFI)。
PCA82C250是Philips Semiconductors(现为NXP Semiconductors)推出的一款符合ISO11898标准的CAN控制器接口集成电路。它具备以下关键特点:
1. **高速性能**:PCA82C250支持最高达1Mbps的数据传输速率,适用于高速通信场景。
2. **瞬态保护**:在汽车环境中,总线线路受到瞬态电压保护,能承受恶劣条件。
3. **斜率控制**:通过控制信号上升和下降速率,减少RFI,提高电磁兼容性。
4. **差分接收器**:具有宽共模范围,增强对EMI的抗扰能力,确保接收信号的稳定性。
5. **热保护**:内置热保护机制,防止过热情况。
6. **短路保护**:可以承受短路至电池和地线,增加设备安全性。
7. **低功耗待机模式**:在不活动状态下降低电流消耗,节省能源。
8. **非供电节点不影响总线**:即使节点未供电,也不会干扰总线通信。
9. **节点数量**:至少可连接110个节点,展现强大的扩展能力。
PCA82C250集成电路的应用场景主要集中在需要高速通信的汽车系统中,例如汽车内部的各个模块之间的通信。除此之外,它还适用于工业自动化设备、交通控制、医疗设备、建筑和环境控制系统等领域,提供可靠且高效的通信解决方案。
在订购PCA82C250时,需要参考其订购信息和符号参数,以确保选择正确的产品版本以满足具体应用的需求。这些参数通常包括封装类型、温度范围、额定电压等,以确保设备在实际操作中能正常工作。
2000 Jan 13 4
Philips Semiconductors Product specification
CAN controller interface PCA82C250
FUNCTIONAL DESCRIPTION
The PCA82C250 is the interface between the CAN
protocol controller and the physical bus. It is primarily
intended for high-speed applications (up to 1 Mbaud) in
cars. The device provides differential transmit capability to
the bus and differential receive capability to the CAN
controller. It is fully compatible with the
“ISO 11898”
standard.
A current limiting circuit protects the transmitter output
stage against short-circuit to positive and negative battery
voltage. Although the power dissipation is increased
during this fault condition, this feature will prevent
destruction of the transmitter output stage.
If the junction temperature exceeds a value of
approximately 160 °C, the limiting current of both
transmitter outputs is decreased. Because the transmitter
is responsible for the major part of the power dissipation,
this will result in a reduced power dissipation and hence a
lower chip temperature. All other parts of the IC will remain
in operation. The thermal protection is particularly needed
when a bus line is short-circuited.
The CANH and CANL lines are also protected against
electrical transients which may occur in an automotive
environment.
Pin 8 (Rs) allows three different modes of operation to be
selected: high-speed, slope control or standby.
For high-speed operation, the transmitter output
transistors are simply switched on and off as fast as
possible. In this mode, no measures are taken to limit the
rise and fall slope. Use of a shielded cable is
recommended to avoid RFI problems. The high-speed
mode is selected by connecting pin 8 to ground.
For lower speeds or shorter bus length, an unshielded
twisted pair or a parallel pair of wires can be used for the
bus. To reduce RFI, the rise and fall slope should be
limited. The rise and fall slope can be programmed with a
resistor connected from pin 8 to ground. The slope is
proportional to the current output at pin 8.
If a HIGH level is applied to pin 8, the circuit enters a low
current standby mode. In this mode, the transmitter is
switched off and the receiver is switched to a low current.
If dominant bits are detected (differential bus voltage
>0.9 V), RXD will be switched to a LOW level.
The microcontroller should react to this condition by
switching the transceiver back to normal operation (via
pin 8). Because the receiver is slow in standby mode, the
first message will be lost.
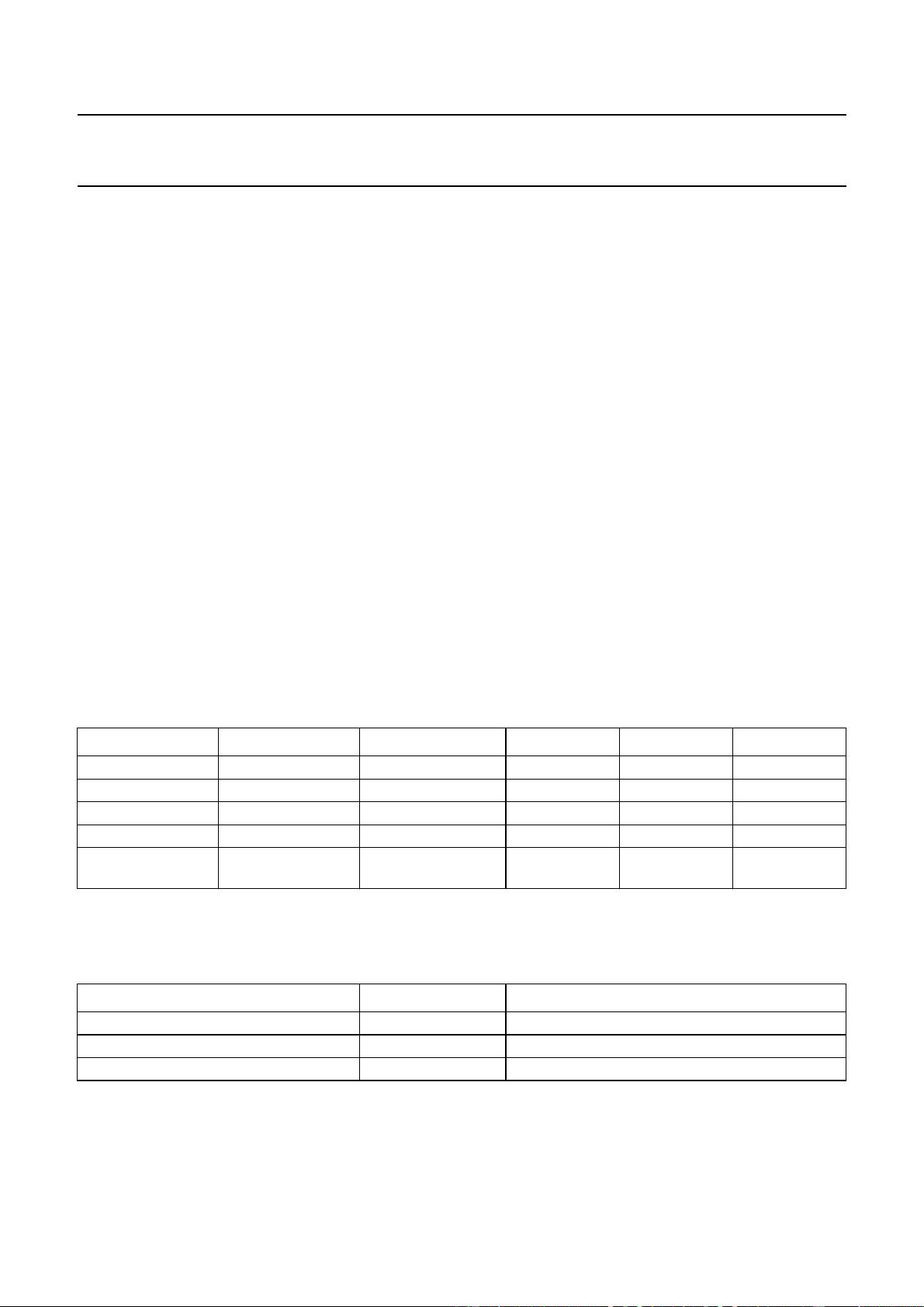
Table 1 Truth table of the CAN transceiver
Note
1. X = don’t care.
Table 2 Pin Rs summary
SUPPLY TXD CANH CANL BUS STATE RXD
4.5 to 5.5 V 0 HIGH LOW dominant 0
4.5 to 5.5 V 1 (or floating) floating floating recessive 1
<2 V (not powered) X
(1)
floating floating recessive X
(1)
2V<V
CC
< 4.5 V >0.75V
CC
floating floating recessive X
(1)
2V<V
CC
< 4.5 V X
(1)
floating if
V
Rs
> 0.75V
CC
floating if
V
Rs
> 0.75V
CC
recessive X
(1)
CONDITION FORCED AT PIN Rs MODE RESULTING VOLTAGE OR CURRENT AT PIN Rs
V
Rs
> 0.75V
CC
standby I
Rs
< 10 µA
−10 µA<I
Rs
< −200 µA slope control 0.4V
CC
<V
Rs
< 0.6V
CC
V
Rs
< 0.3V
CC
high-speed I
Rs
< −500 µA
剩余19页未读,继续阅读
236 浏览量
2159 浏览量
353 浏览量
327 浏览量
306 浏览量
2011-09-27 上传
1040 浏览量

jinan1861
- 粉丝: 11
- 资源: 13
 我的内容管理
展开
我的内容管理
展开







最新资源
- DWR-本书可以当作一本DWR完整的教程
- 编译原理 (中文版)机械工业出版 要讨论编译器设计重要的主题 ,词法分析,语法分析,运行环境,代码生产,代码优化等
- 计算机操作系统(汤子瀛)习题答案
- NS2多接口多信道扩展
- Visual C++ 串口通信技术与工程实践
- ASN1_Complete
- 2006年同等学力人员申请硕士学位计算机科学与技术试卷
- 【翻译】Professional.Rootkits 第一章(更新完整)
- 多元统计聚类分析ppt
- IRT310_470_Col33.pdf
- j2ee指南中文版,事例
- linux常用命令手册
- 软件工程:人月神话(学习软件工程必看的好书)
- 博创2410开发板光盘资料----WINCE实验指导书
- MPI分布内存并行程序开发
- hibernate配置
