计算机视觉:经典角点检测方法解析
下载需积分: 50 | PPT格式 | 2.48MB |
更新于2024-07-22
| 57 浏览量 | 举报
"这篇PPT是来自ICCV2004大会的计算机视觉讲座,由Darya Frolova和Denis Simakov主讲,重点讨论了角点检测,特别是Canny边缘检测和Harris角点检测等核心概念。在计算机视觉领域,角点检测是一种重要的图像特征提取技术,用于识别图像中的显著点,这些点在旋转、缩放或光照变化下保持稳定,对于图像匹配、全景构建、3D重建等多个应用至关重要。"
本文将详细阐述PPT中的关键知识点:
1. **角点检测的重要性**:角点是图像中具有高局部变化率的点,它们在不同的视角或缩放级别下保持相对不变,因此成为图像匹配和定位的关键元素。例如,在构建全景图时,通过找到不同图像间的对应角点,可以准确地对齐和融合图像。
2. **Canny边缘检测**:Canny算法是一种多级边缘检测方法,通过高斯滤波减少噪声,然后计算梯度强度和方向,最后使用非极大值抑制来消除边缘检测过程中的假响应。虽然Canny算法能有效地检测边缘,但并不直接提供角点信息。
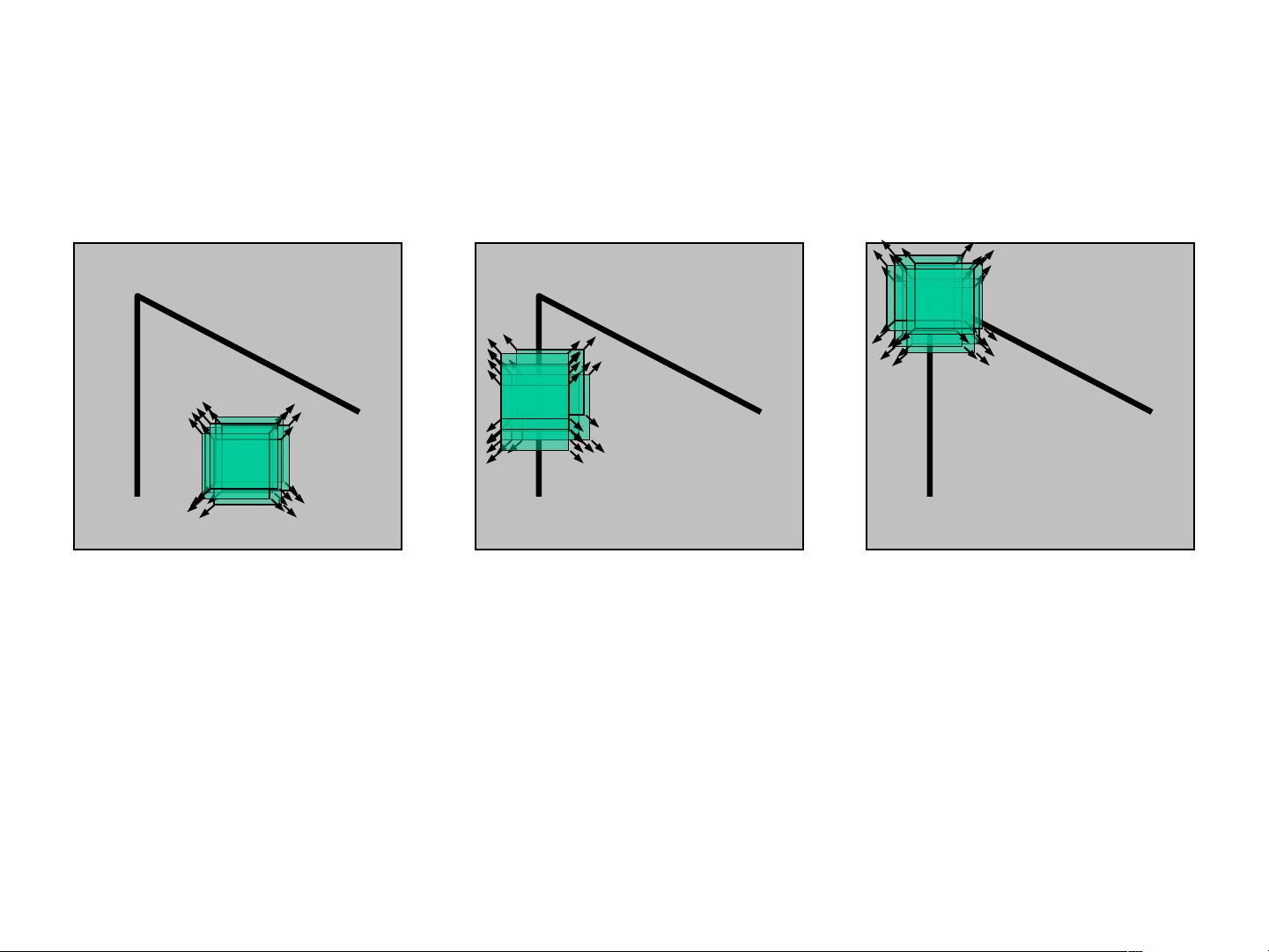
3. **Harris角点检测**:Harris角点检测器利用图像局部区域的灰度变化来评估点是否为角点。它计算一个2x2的结构矩阵,该矩阵的特征值用于判断点是否为角点。如果两个特征值差距大,那么该点可能是角点,因为这表示该点周围的灰度变化在多个方向上都显著。
4. **旋转不变性和尺度不变性**:在角点检测中,为了使检测结果不受图像旋转或缩放的影响,检测器需要具备旋转不变性和尺度不变性。旋转不变性意味着无论图像如何旋转,角点都能被正确检测;尺度不变性则要求在不同缩放比例下,角点也能被检测出来。
5. **图像匹配与特征描述符**:除了检测角点,还需要为每个角点分配一个描述符,以便在不同图像中找到对应的角点。描述符必须是可靠的,能在各种条件下保持独特性,如SIFT(尺度不变特征变换)和SURF(加速稳健特征)都是常用的角点描述符。
6. **应用广泛**:角点检测不仅仅用于全景图的构建,还涉及到图像对齐(通过 homography 或 fundamental matrix),3D重建,运动追踪,对象识别,数据库索引和检索,机器人导航等多个领域,是计算机视觉中的基础工具。
7. **问题与挑战**:角点检测面临两大挑战:一是要在不同图像中独立检测到相同的点,这需要可重复的检测器;二是正确识别对应点,这需要稳定且区分度高的描述符。这两个问题的解决对于角点检测的性能至关重要。
总结,Darya Frolova和Denis Simakov的PPT深入探讨了计算机视觉中的角点检测,包括其原理、应用以及所面临的挑战,对于理解和应用这些技术具有极高的价值。
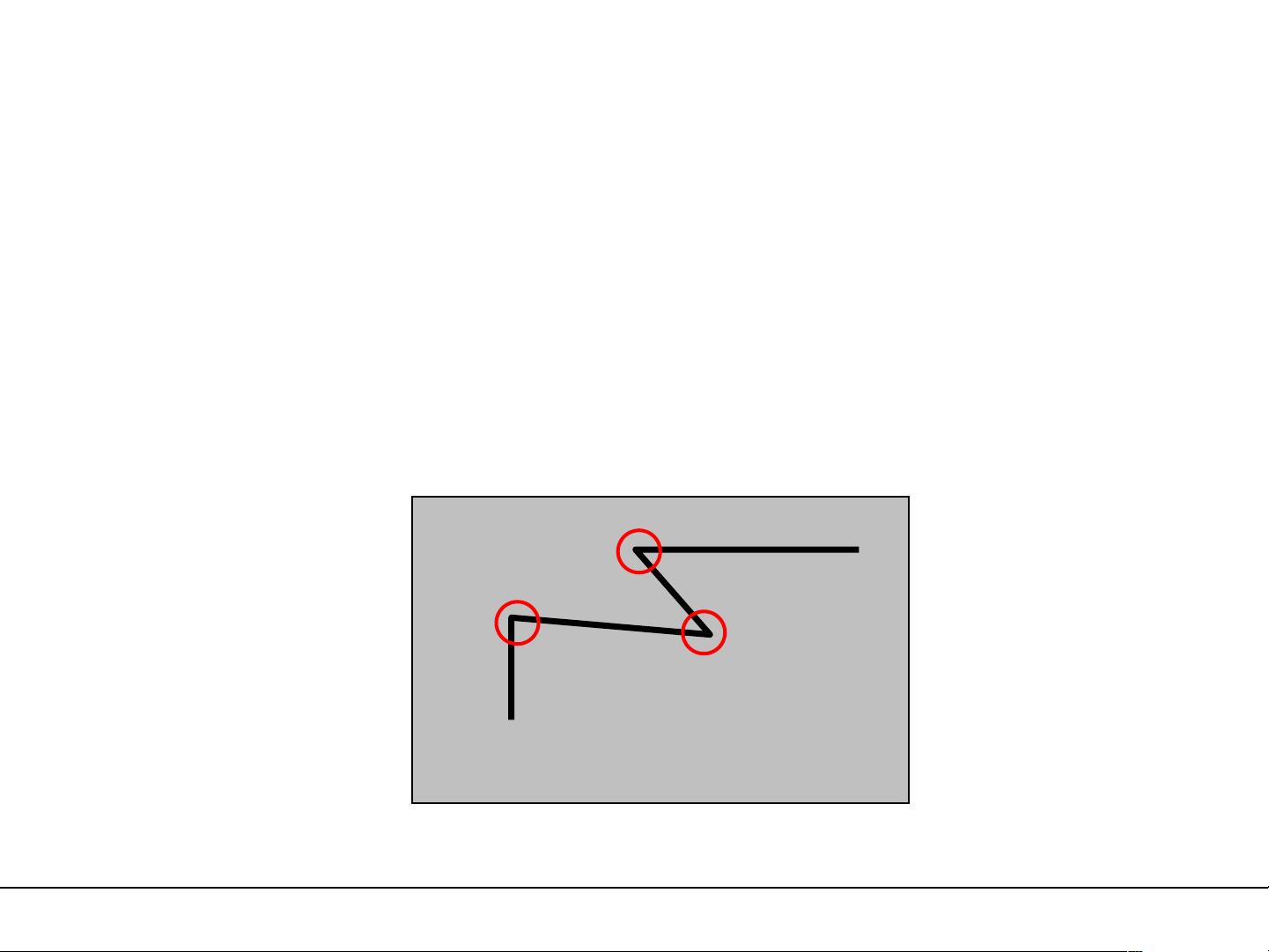
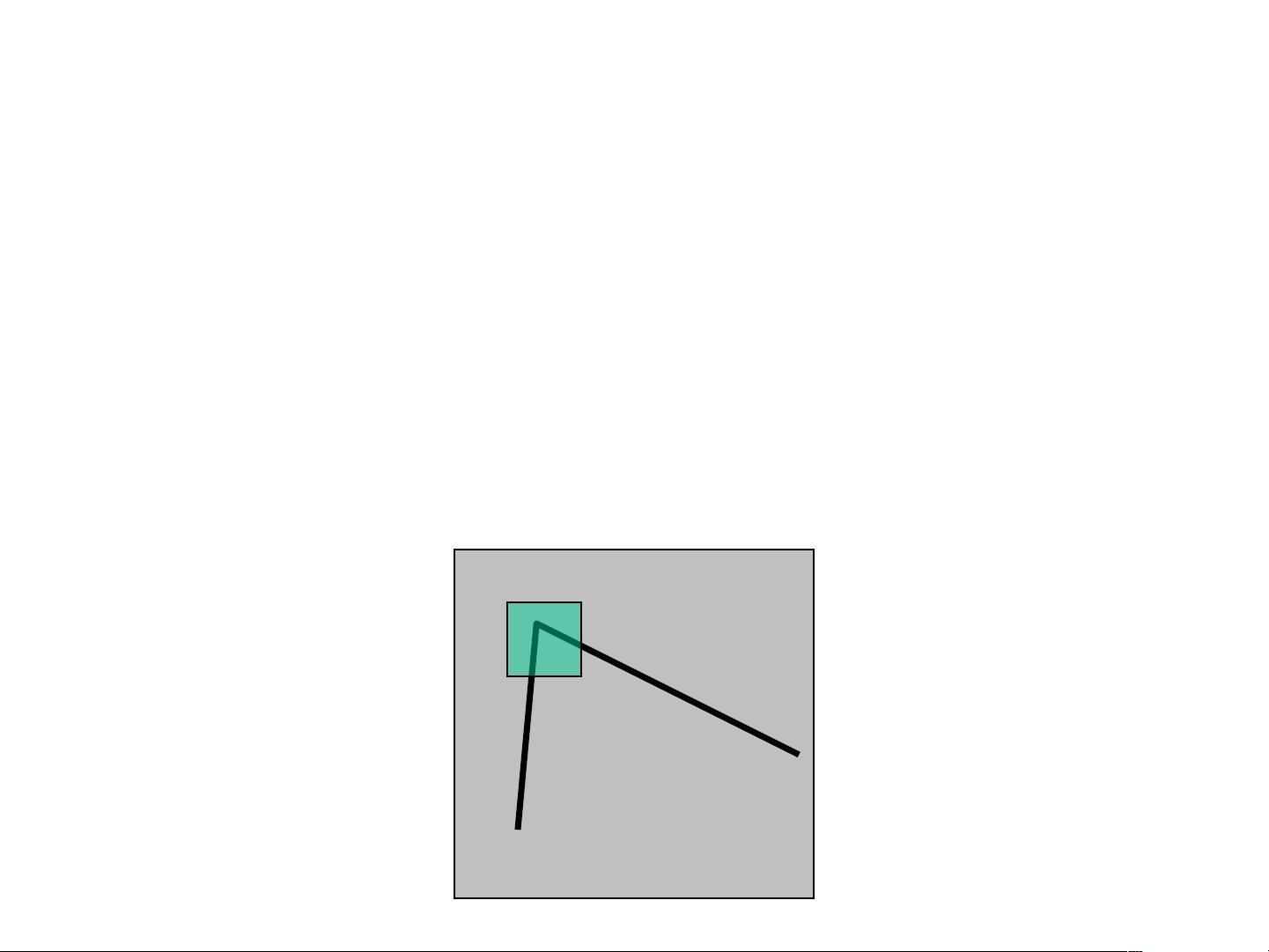
An introductory example:
Harris corner detector
C.Harris, M.Stephens. “A Combined Corner and Edge Detector”. 1988
剩余63页未读,继续阅读
相关推荐



12 浏览量

tracer9
- 粉丝: 29
 我的内容管理
展开
我的内容管理
展开







最新资源
- DeepFreeze密码移除工具6.x版本使用教程
- MQ2烟雾传感器无线报警器项目解析
- Android实现消息推送技术:WebSocket的运用解析
- 利用jQuery插件自定义制作酷似Flash的广告横幅通栏
- 自定义滚动时间选择器,轻松转换为Jar包
- Python环境下pyuvs-rt模块的使用与应用
- DLL文件导出函数查看器 - 查看DLL函数名称
- Laravel框架深度解析:开发者的创造力与学习资源
- 实现滚动屏幕背景固定,提升网页高端视觉效果
- 遗传算法解决0-1背包问题
- 必备nagios插件压缩包:实现监控的关键
- Asp.Net2.0 Data Tutorial全集深度解析
- Flutter文本分割插件flutter_break_iterator入门与实践
- GD Spi Flash存储器的详细技术手册
- 深入解析MyBatis PageHelper分页插件的使用与原理
- DELPHI实现斗地主游戏设计及半成品源码分析
