OCTRexpert:3D眼科OCT图像特征基注册方法
PDF格式 | 1.35MB |
更新于2024-08-26
| 28 浏览量 | 举报
OCTRexpert是一项针对视网膜光学相干断层成像(Retinal Optical coherence Tomography, OCT)图像的3D注册方法。在医学领域,图像注册被广泛用于研究随时间变化的纵向数据,以及进行疾病进展的定量监测和计算机辅助诊断与治疗。然而,在视网膜OCT图像的变形(deformable registration)方面,即实现更精确和定量的图像对比,尚未得到充分发展。
该研究论文提出了一个创新的3D注册方案,专门针对视网膜OCT数据,旨在填补这一空白。OCTRexpert的独特之处在于它不仅适用于正常个体,也适用于严重病理情况下的纵向OCT图像。其方法论分为三个关键步骤:
1. 预处理:首先,通过一种预处理技术,OCTRexpert致力于消除眼动带来的图像噪声(eyemotion artifact),这是确保后续精确注册的关键步骤,因为它能减少无关的干扰,提高图像质量。
2. 设计-检测-变形策略:在设计阶段,为图像中的每个像素点(voxel)设计独特的特征,这些特征能够代表局部结构的信息,如纹理、边缘或形状。这一步骤旨在捕捉图像的内在结构特征,为匹配和比对提供基础。
3. 检测与对应:在检测步骤中,算法选择活跃的像素点,通过匹配算法找到模板图像中与之相对应的点。这涉及到点对点的精确匹配,确保了两个图像之间的空间关系的一致性。
4. 变形:最后,在变形阶段,通过层次化的变形模型,将目标图像中的像素按照与模板图像中已建立的对应关系进行调整,实现了两幅图像的精确对齐。这种方法允许对于不同时间点的视网膜OCT扫描,即使在病程变化下,也能进行准确的空间结构调整。
OCTRexpert不仅提高了视网膜OCT图像的三维注册精度,还为纵向研究、疾病跟踪以及基于OCT的自动化分析提供了强大的工具。这项工作的贡献在于将复杂的变形模型与特定的视网膜OCT特征相结合,为眼科临床实践和科学研究带来了显著的进步。
3D retinal SD-OCT images. This is due to two main reasons.
First, the structure of the retina is different from that of the
brain. Geometric moment invariants (GMIs) can distinguish
different geometric structures of brain, but it fails to distinguish
the plate-like structure of retinal layers. Second, retinal
SD-OCT images have much higher resolution than brain MRI
images. In HAMMER, the driving voxels are selected by using
a fuzzy clustering method. Since the fuzzy clustering method
needs to calculate the distance between voxels, it is time
consuming especially when the data is large and may have local
minima. Our work is inspired by HAMMER and tries to extend
HAMMER to OCT registration. Compared with other retinal
OCT image registration methods, we adopt HAMMER's
hierarchical attribute matching mechanism to improve the
registration accuracy while reducing the computation
complexity. Furthermore, our work presents several novel
elements compared with HAMMER: 1)We propose to use
intensity-based region feature, surface-based structure feature
and vessel-like feature instead of GMI feature to distinguish
different structures of retina. 2) We propose an efficient
driving voxel selection method to further reduce the
computation complexity. In our method, rather than randomly
selecting the active voxels, the active voxels are hierarchically
selected following a strategy for importance coefficient
assignment. 3) A preprocessing step is designed to remove the
motion distortion in retinal OCT data before registration. To the
best of our knowledge, the proposed method is the first
longitudinal retinal OCT image registration algorithm which
considered both normal data and serious pathological data.
III. METHODS
A. Overview of the Approach
The deformable transformation is a free form mapping at
each voxel
x
. It can be solved by finding a transformation of
each voxel such that the energy function is minimized.
Considering the high resolution of OCT data, the energy
function would be a very high dimension function which makes
it extremely difficult to find the global optimal solution. The
main difficulties are the computation complexity and the local
minima problem. To speed up registration process and reduce
local minima, a novel design-detection-deformation
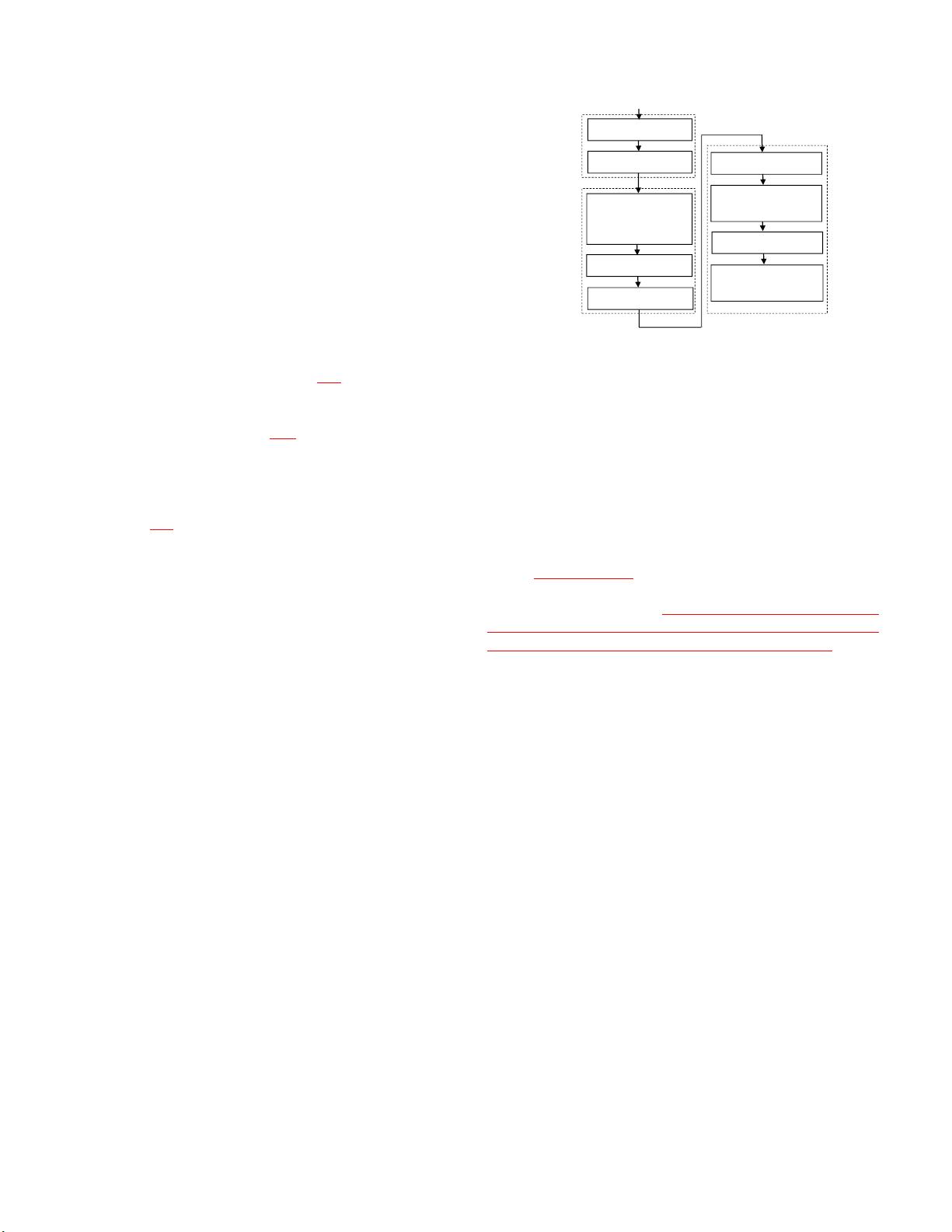
mechanism is designed. The proposed method consists of four
steps: preprocessing, feature design, correspondence detection
and hierarchical deformation. The overall flowchart is shown in
Fig. 2. In preprocessing step, OCT data are first segmented by
detecting 7 surfaces using graph search-based method and then
B-scans are flattened to correct eye movement. In the design
step, a couple of features are designed for each voxel in the
image. In the detection and deformation step, active voxels are
hierarchically selected and point-to-point correspondences
between the subject and the template images are established.
The image is then hierarchically deformed according to the
detected correspondences in multi-resolution. The detail of
each step is discussed in the following parts.
Registration
Feature design
Preprocessing
Input template and
subject image
B-scan flattening
Vesselness estimation
Region intensity
calculation & surface
feature extraction
Deformable registration
Output 3D registration
result
Image projection
Active voxel decision
Correspondence
detection
Image Segmentation
Fig. 2. Flowchart of the proposed algorithm.
B. Preprocessing
1) Multi-resolution graph search: 3D graph-based optimal
surface segmentation method can detect multiple interacting
surfaces simultaneously [21]. The basic idea is to transform the
optimal surface detection problem into computing a minimum
cut in an arc-weighted directed graph. This method and its
variations are successfully applied to retinal layer segmentation
of macular optical coherence tomography images [22-31]. The
surface segmentation methods designed for normal retinas can
also be used to segment the retinas with glaucoma and multiple
sclerosis or other diseases without dramatic change in the layer
structure in the early stage. However, it is difficult to segment
the retinas with additional layer structures such as sub-RPE
fluid and intra-retinal cysts by using the same methods. In our
algorithm, by considering both normal and serious pathological
data such as CNV, the surface segmentation is conducted based
on our previously proposed constrained graph search method
[32]. In preprocessing, all B-scans of the template image and
the subject image are segmented by seven retinal surfaces as
shown in Fig.3. These seven surfaces partition an OCT dataset
into six layers: (1) retinal nerve fiber layer (RNFL), (2)
ganglion cell layer and inner plexiform layer (GCL+IPL), (3)
inner nuclear layer (INL), (4) outer plexiform layer (OPL), (5)
outer nuclear layer and inner/outer segment layer
(ONL+IS/OSL), (6) retinal pigment epithelium (RPE).
2) B-scans flattening: Eye movement artifact occurring
during 3D OCT scanning is a problem for retinal OCT imaging
and makes image registration difficult. During OCT acquisition
process, since the volume is acquired in a few seconds, eye
movement caused by heart beat and respiration in the scan
process results in motion artifacts. In motion distorted data, the
positions of layers varies greatly in consecutive B-scans which
make interpolation and regularization difficult. The position
shifts of B-scans can be viewed in the y-z slices, as shown in
Fig. 4 (a), where each column corresponds to a B-scan.
Flattening the 3D OCT volumes is often used to correct eye
下载后可阅读完整内容,剩余12页未读,立即下载
相关推荐
208 浏览量
206 浏览量
107 浏览量
2021-02-09 上传
2021-02-06 上传
β-Ⅲ-Tubulin: A Reliable Marker for Retinal Ganglion Cell Labeling in Experimental Models of Glaucoma
106 浏览量
137 浏览量
2022-07-14 上传
2021-02-08 上传
137 浏览量

weixin_38626858
- 粉丝: 3
 我的内容管理
展开
我的内容管理
展开








最新资源
- Postman-win版下载及安装指南
- UCI数据集:全面的分类算法测试资源
- 全平台ffmpeg编译教程及自定义参数设置
- lsrunase: 高效管理程序运行权限与编辑
- 富文本编辑器实现高级表格操作功能
- 单片机控制下的交通灯系统设计
- Leica TruView三维查看软件发布,支持手机与电脑端
- MATLAB实现语音信号降噪与处理技术详解
- Lua5.3配合Luacheck工具的使用介绍
- PbHelper工具新增PB版本支持及界面美化
- Chart.js图表生成工具:简易Demo快速使用指南
- JavaWeb实现的超市进销存管理系统源码
- 2017年升级版博格太阳能测试系统软件发布
- PC移动端通用底部固定悬浮图片轮播代码
- 流形学习:核心概念、可视化技术与常用算法
- Android Studio专用Gradle 4.7离线安装包介绍











