粒子滤波:机器人定位中的关键技术与应用
需积分: 14 101 浏览量
更新于2024-07-18
收藏 2.19MB PPT 举报
粒子滤波(Particle Filters)是一种基于概率模型的算法,它在机器人定位等领域中有着广泛的应用。在机器人导航和感知中,由于环境复杂性和传感器数据的不确定性,非线性和非高斯性过程的估计变得尤为重要。粒子滤波通过将系统的状态信念表示为一组随机样本(即粒子),并通过迭代的方式更新这些样本及其相应的权重,实现了对这些不确定性的有效处理。
该技术的核心概念是概率贝叶斯滤波(Bayesian Filter)的实现,如蒙特卡洛滤波(Monte Carlo filter)、生存竞争(Survival of the Fittest)、聚类方法(Condensation)、和Bootstrap滤波等。它们各自具有不同的优点和适用场景,例如:
1. **蒙特卡洛滤波**:它是最早的形式,简单地通过在每个时间步从先验概率分布中采样粒子,然后根据传感器观测更新粒子状态和权重。
2. **Survival of the Fittest**:这种策略基于每个粒子的后验概率来保留最有可能反映真实状态的粒子,淘汰其他粒子。
3. **Condensation**:通过将粒子按照其后验概率进行排序并只保留最有可能的粒子,减少粒子数量但保持估计的准确性。
4. **Bootstrap filter**:利用观测数据对当前粒子进行重新采样,同时根据观测更新粒子的状态和权重,这种方法更关注于保持多样性。
5. **粒子滤波**:这是一种通用的方法,通过重要性抽样(Importance Sampling)和重采样(Resampling)来动态调整粒子集合,以适应复杂的系统动态和观测条件。
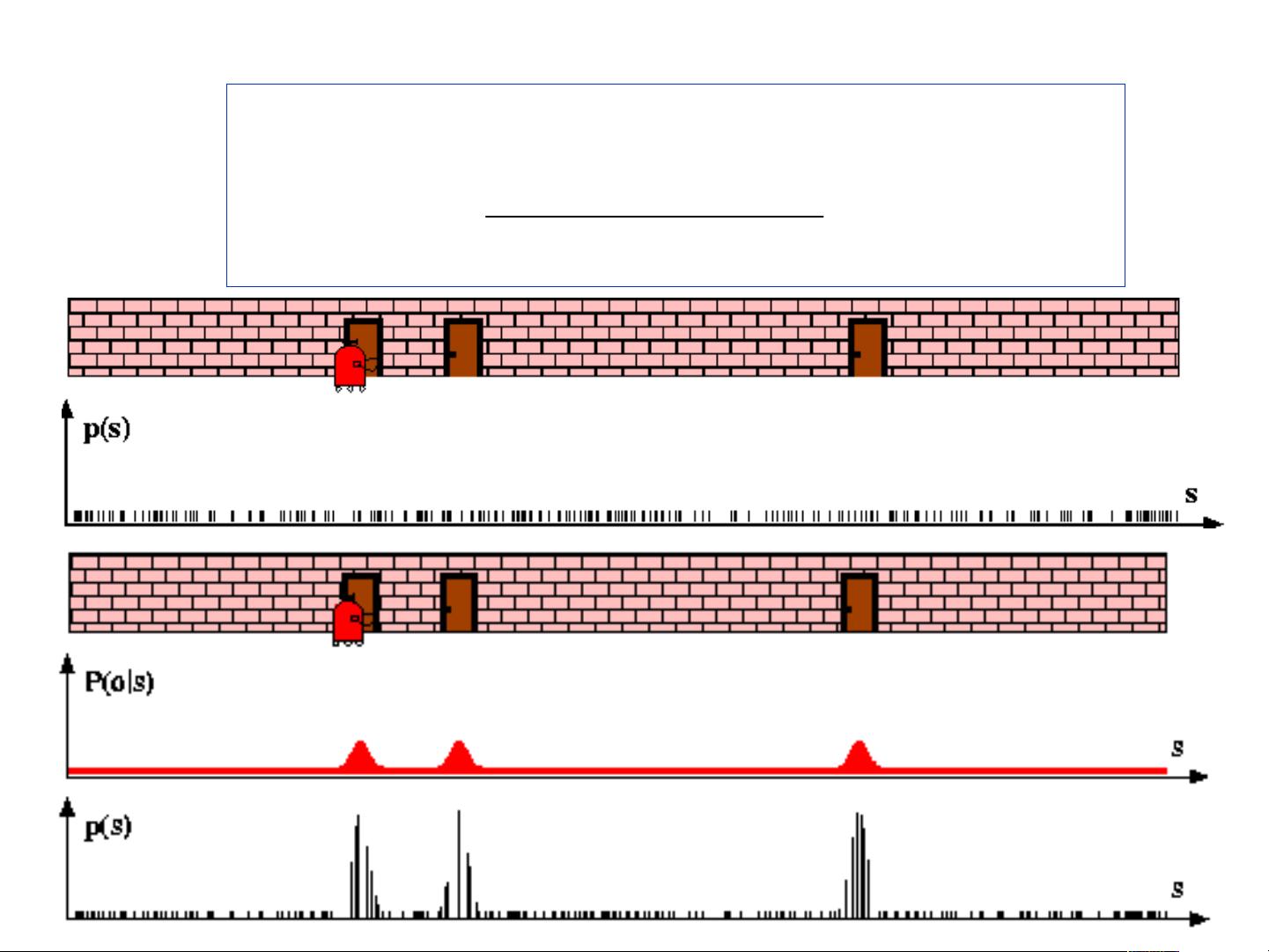
**重要性抽样**:是通过计算每个粒子相对于目标分布(如p(x|z1, z2, z3))的权重,这些权重反映了粒子在给定观测数据下的概率。权重大的粒子在下一轮采样时被赋予更高的可能性。
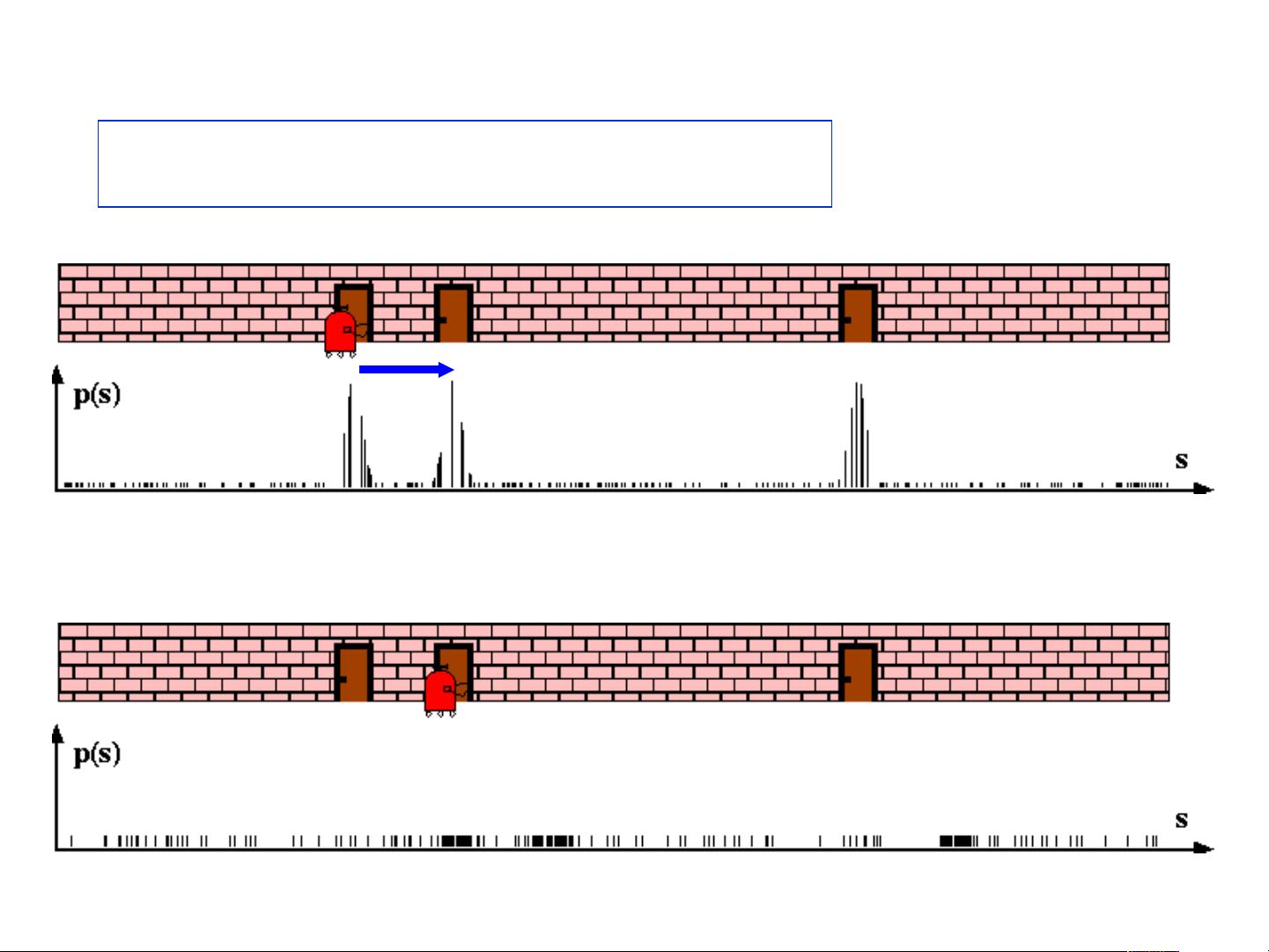
**重采样**:当粒子集合中的权重分布严重偏斜时,为了保持多样性,会进行重采样,确保每个粒子具有大致相等的代表性。这有助于避免过拟合或欠拟合的问题。
**实际应用示例**:
- **声纳定位**:粒子滤波常用于处理非线性声纳数据,通过将噪声添加到检测参数上,可以模拟出与目标分布相符的粒子。
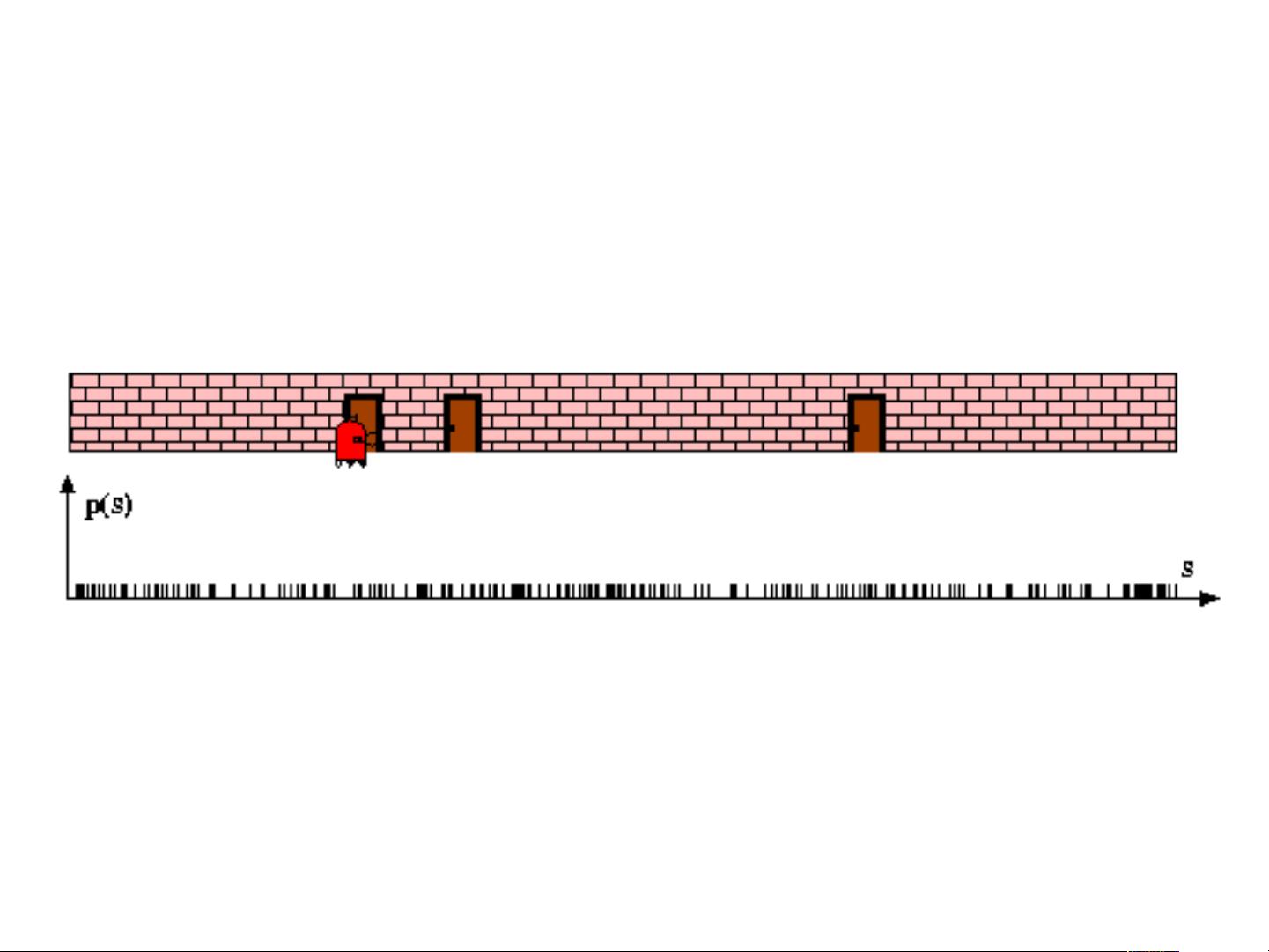
- **地标检测**:在机器人导航中,通过比较传感器读数与预设的地标分布,粒子滤波可以帮助机器人确定其位置和方向。
- **动态贝叶斯网络**:粒子滤波与其他统计建模方法(如DBNs)结合,可以处理复杂的动态系统,如车辆跟踪或无人机路径规划。
总结来说,粒子滤波是一种强大的工具,它通过模拟不确定性并根据观测不断调整粒子集合,成功解决了机器人定位中的非线性、非高斯问题。然而,它也存在一些挑战,如效率低下、粒子衰减和局部最优解等,因此优化和改进的方法一直是研究热点。
2019-08-13 上传
2021-10-11 上传
2021-10-05 上传
2021-10-11 上传

四脚猫
- 粉丝: 76
- 资源: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- 探索AVL树算法:以Faculdade Senac Porto Alegre实践为例
- 小学语文教学新工具:创新黑板设计解析
- Minecraft服务器管理新插件ServerForms发布
- MATLAB基因网络模型代码实现及开源分享
- 全方位技术项目源码合集:***报名系统
- Phalcon框架实战案例分析
- MATLAB与Python结合实现短期电力负荷预测的DAT300项目解析
- 市场营销教学专用查询装置设计方案
- 随身WiFi高通210 MS8909设备的Root引导文件破解攻略
- 实现服务器端级联:modella与leveldb适配器的应用
- Oracle Linux安装必备依赖包清单与步骤
- Shyer项目:寻找喜欢的聊天伙伴
- MEAN堆栈入门项目: postings-app
- 在线WPS办公功能全接触及应用示例
- 新型带储订盒订书机设计文档
- VB多媒体教学演示系统源代码及技术项目资源大全
