GPU加速的改进光流法在视觉SLAM中的应用与优化
需积分: 0 150 浏览量
更新于2024-06-30
收藏 5.95MB PDF 举报
"基于改进光流法的视觉SLAM技术是一篇针对移动机器人、无人机和自动驾驶等领域研究的重要课题,其核心目标是通过结合实时定位和环境建模,实现自主导航和控制。本文由重庆大学研究生刘冰撰写,其硕士学位论文探讨了视觉SLAM这一关键技术,主要围绕Kinect 1.0和小觅摄像头这两种视觉传感器展开。
首先,作者回顾了SLAM技术的发展历程,强调了稀疏性在图优化SLAM中的作用,并介绍了当前流行的开源SLAM系统以及成功应用于工业实践的商业化案例,明确了本文的研究重点在于视觉SLAM方法的改进。
接着,作者深入分析了视觉SLAM的理论基础,涵盖了相机模型及其工作原理,特别是Microsoft Kinect 1.0如何通过测量深度来构建三维空间。此外,作者讨论了三维空间中刚体运动的数学描述,以及如何利用李群李代数优化位姿问题。在图像处理方面,文章着重探讨了特征点检测及其在视觉SLAM中的重要性。
进一步,论文的核心贡献在于对传统光流法的优化。基于GPU加速,作者提出了一种改进的光流法,这种方法在保持高精度的同时提高了计算效率,这对于实时性能要求极高的视觉SLAM至关重要。作者将这种改进应用于RGBD SLAM(基于RGB和深度信息的SLAM)算法,优化了系统性能。
最后,文章还探讨了如何将改进的光流法应用到VINSMono(一种单目视觉SLAM系统)上,以提升其在单一相机下的定位和建图能力。通过这些改进,本文旨在推动视觉SLAM技术的发展,使其在实际应用中更加可靠和高效。
这篇硕士学位论文不仅提供了对视觉SLAM技术的全面理解,还展示了作者在该领域的创新性工作,为未来的研究和工程实践提供了有价值的技术支撑。"
1 绪论
5
算法和应用。随后按照目前优秀的开源算法和优秀的国内外 SLAM 的商业应用进
行分别阐述。
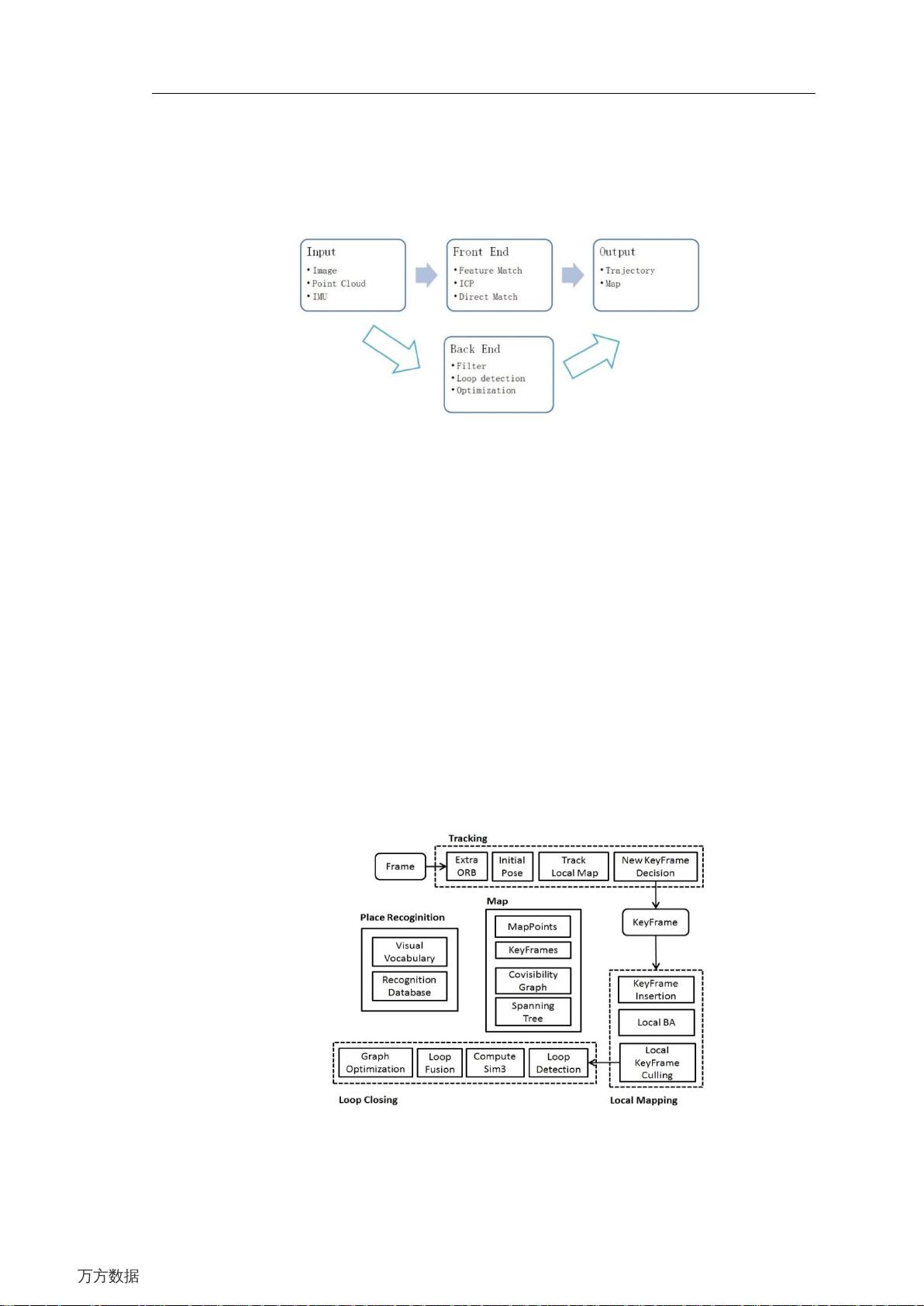
图 1.4 SLAM 的前端和后端
Fig. 1.4 Front End and back end in SLAM
1.2.1 优秀开源算法
随着 SLAM 技术的飞快发展,涌现了许多优秀的开源 SLAM 算法,列举现阶
段比较优秀的视觉 SLAM 算法进行介绍:
ORB-SLAM/ORB-SLAM2
[10][11]
ORB-SLAM 是一个基于特征点的实时单目
SLAM 系统,在大规模的、小规模的、室内室外的环境都可以运行,该系统在剧烈
运动下鲁棒性依然很好,支持闭环检测和重定位,并能够自动初始化。该系统包含
了所有 SLAM 系统共有的模块:跟踪(Tracking)、建图(Mapping)、重定位
(Relocalization)、闭环检测(Loop closing)。 ORB-SLAM 主要分为三个线程进行,
如图 1.5 所示的,分别是 Tracking、LocalMapping 和 LoopClosing:
图 1.5 ORB SLAM
Fig. 1.5 ORB SLAM
万方数据

剩余90页未读,继续阅读
2022-08-03 上传
135 浏览量
2024-05-03 上传
点击了解资源详情
2022-08-04 上传
4325 浏览量
2023-03-29 上传
500 浏览量

田仲政
- 粉丝: 19
- 资源: 332
 我的内容管理
展开
我的内容管理
展开







最新资源
- 易语言超级列表框进度条
- CircleFun
- easy-tips:使用Go&PHP的代码职业中的一些提示:partying_face::partying_face::partying_face:
- 动画使图像实现动画效果
- React-Authentication-Burj-Al-Arab
- MT4跟单软件_mt4跟单_跟单_mt4跟单_跟单EA_ea
- 根据hostname自动获取目标设备的IPv4和Ipv6地址,并申请socket的模块
- 易语言超级列表框转HTML
- postcss-atcss-constant:ACSS禁止规则级联的模块
- XcodeProj::memo:读取,更新和编写Xcode项目
- KiLib-OSS:KiLib开源
- 易语言超级列表框读取自定义的配置内容
- PiBoom:通过树莓派上的 GPIO 按钮控制 MusicBox
- rentry:命令行中的Markdown pastebin
- 1click-calculator
- 精品图片站
