51单片机PID控制算法详解:原理与应用
需积分: 50 173 浏览量
更新于2024-09-11
收藏 340KB PDF 举报
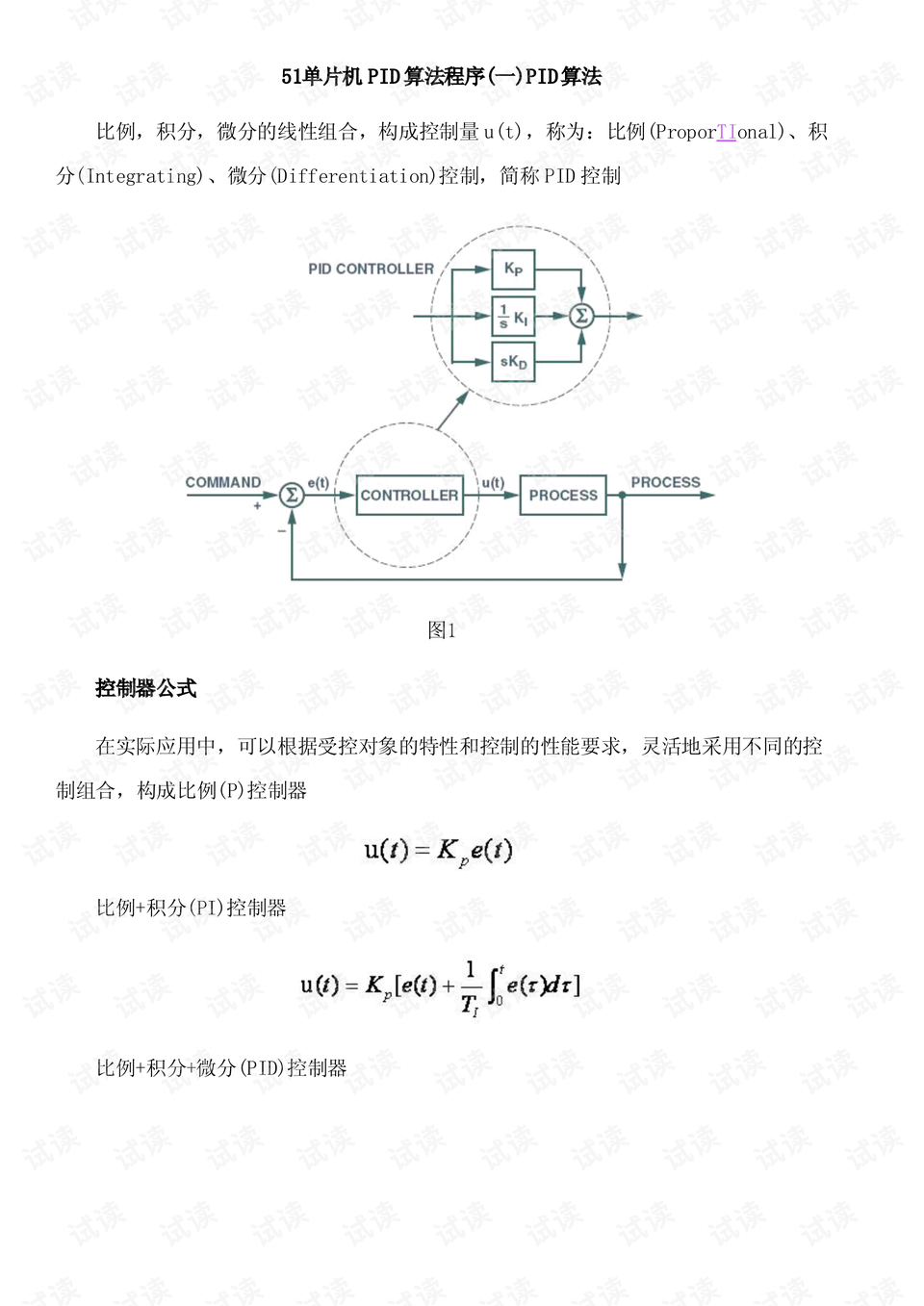
51单片机PID算法程序是一种在工业控制和自动化领域广泛应用的控制策略,它结合了比例(P),积分(I),和微分(D)三种基本控制方法,以实现对各种物理量如温度、压力、流量等的精确控制。PID控制器的设计核心在于通过这三个要素的线性组合来调整输出控制信号,以补偿系统的动态行为并减少误差。
1. **比例控制** (P): P控制器仅考虑当前的偏差,其输出与误差成正比。它快速响应误差,但不能消除稳态误差,且增大的比例放大系数可能导致系统稳定性问题。比例控制在图2所示的阶跃响应中可以看到其作用明显,但无法处理长时间存在的误差。
2. **积分控制** (I): I控制器通过累积误差的时间积分来减少稳态误差。积分作用随着时间的增长而增强,直到误差减小到零。当与比例控制结合时(PI控制器),可以确保系统在达到稳态后无剩余误差,但单独使用积分时可能因调节速度慢而影响系统响应速度。
3. **微分控制** (D): D控制器根据误差的变化率来调整输出,有助于解决系统惯性或滞后引起的过冲和振荡问题。当误差大时,D控制作用显著,误差接近零时,抑制作用减弱,这是一种前瞻性的控制策略。
在单片机PID算法程序中,设计者通常会根据具体系统的特性选择合适的控制组合。例如,对于快速响应和精度要求高的系统,可能会使用PID控制器;而对于响应速度较慢,且需要消除稳态误差的情况,可能采用PI控制器;而对于具有显著滞后或惯性的系统,则需要集成D控制以提高稳定性。
实施PID算法在51单片机上需要编程实现,通常涉及模拟信号处理、数值计算以及控制算法的实时执行。程序可能包括输入采样、误差计算、比例、积分和微分运算,以及最终控制信号的生成和执行。在编写代码时,开发者需注意算法的精度、计算效率和实时性,以满足控制系统的实际需求。在实际应用中,PID参数的调整(如比例带、积分时间和微分时间)也是优化控制性能的关键步骤。
下载后可阅读完整内容,剩余7页未读,立即下载
633 浏览量
183 浏览量
134 浏览量
821 浏览量
2022-11-15 上传
2022-06-15 上传

pudongjie1218
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- Service Notification综合应用与学习研究
- 开源实验光线投射引擎:Ray enchanter
- 全面体验无注册码电脑测试软件EverestUltimate
- Arduino源码实现多功能纸张检测系统
- Potrace for Sketch插件:将位图快速转化为矢量图形
- 2022北航操作系统课程全套课件
- 新型Minecraft块文件格式:快速且可扩展的Blocks-master
- 课堂提问语音点名器V1.0:创新教学辅助工具发布
- 掌握Google GTest,助力Protobuf源码构建
- 深入解析IIS使用方法与技巧
- 深入解析Android系统框架与中间件
- 赫尔辛基设计系统草图助手:保持草图文件一致性
- TortoiseSVN1.9.3 中文版安装教程与语言包下载
- 无需arg参数直接暴露GC功能的JavaScript模块
- 16世邦IP网络广播SDK技术解析与应用
- 新版桌面工具实现高效窗口管理与UNICODE支持
