CAN总线详解:博世公司ISO标准的汽车通信协议
需积分: 35 52 浏览量
更新于2024-07-26
收藏 4.71MB PDF 举报
CAN总线是一种专为汽车应用设计的串行通信协议,全称为Controller Area Network,由德国电气商博世公司在1986年推出。CAN因其高效、可靠性和成本效益,在工业自动化、船舶、医疗设备以及工业设备等多个领域得到了广泛应用。
CAN的初衷是为了解决汽车行业中的多电子控制系统通信问题,这些系统之间的数据传输需求多样且对可靠性有高要求。传统的多线束解决方案不仅增加了复杂性,还提高了成本。CAN通过ISO 11898和ISO 11519这两个国际标准进行规范化,简化了通信网络,使得在一个标准化的框架下,可以实现多个节点间的高速、可靠数据交换。
CAN协议核心包括以下几个方面:
1. 错误处理:CAN采用错误检测机制,包括错误状态的种类(如数据位错误、形式错误等)、错误计数值的计算,以及错误帧的发送,以确保数据传输的准确性。
2. 帧结构:CAN协议定义了三种类型的帧,即数据帧、遥控帧和错误帧。数据帧用于双向数据传输,遥控帧用于控制其他节点,而错误帧用于报告错误情况。
3. 优先级:CAN支持不同优先级的数据传输,通过优先级字段来决定数据的发送顺序,确保关键信息的及时传递。
4. 位填充:为了提高数据传输的同步性,CAN使用位填充技术,填充0或1来调整帧的长度。
5. 同步与重新同步:CAN协议强调硬件同步,通过特定的位时序规则确保所有节点保持一致的通信步调。如果出现同步问题,节点可以通过再同步机制恢复通信。
6. 硬件实现:CAN通常在硬件层面实现,包括专用的收发器和控制器,它们负责处理信号的物理层细节,如信号的电气特性和传输速率。
CAN的普及不仅限于汽车领域,它已经成为全球工业界的一种通用通信标准,特别是在实时性要求高的工业环境和嵌入式系统中。随着技术的发展,CAN也在不断进化,例如CAN-FD(Flexible Data Rate)提供了更高的数据传输速率,满足了现代工业控制系统的性能需求。
CAN总线以其简化网络设计、提高通信效率和可靠性而备受青睐,是现代电子系统设计中不可或缺的一部分。
应用手册
Page 8 of 48
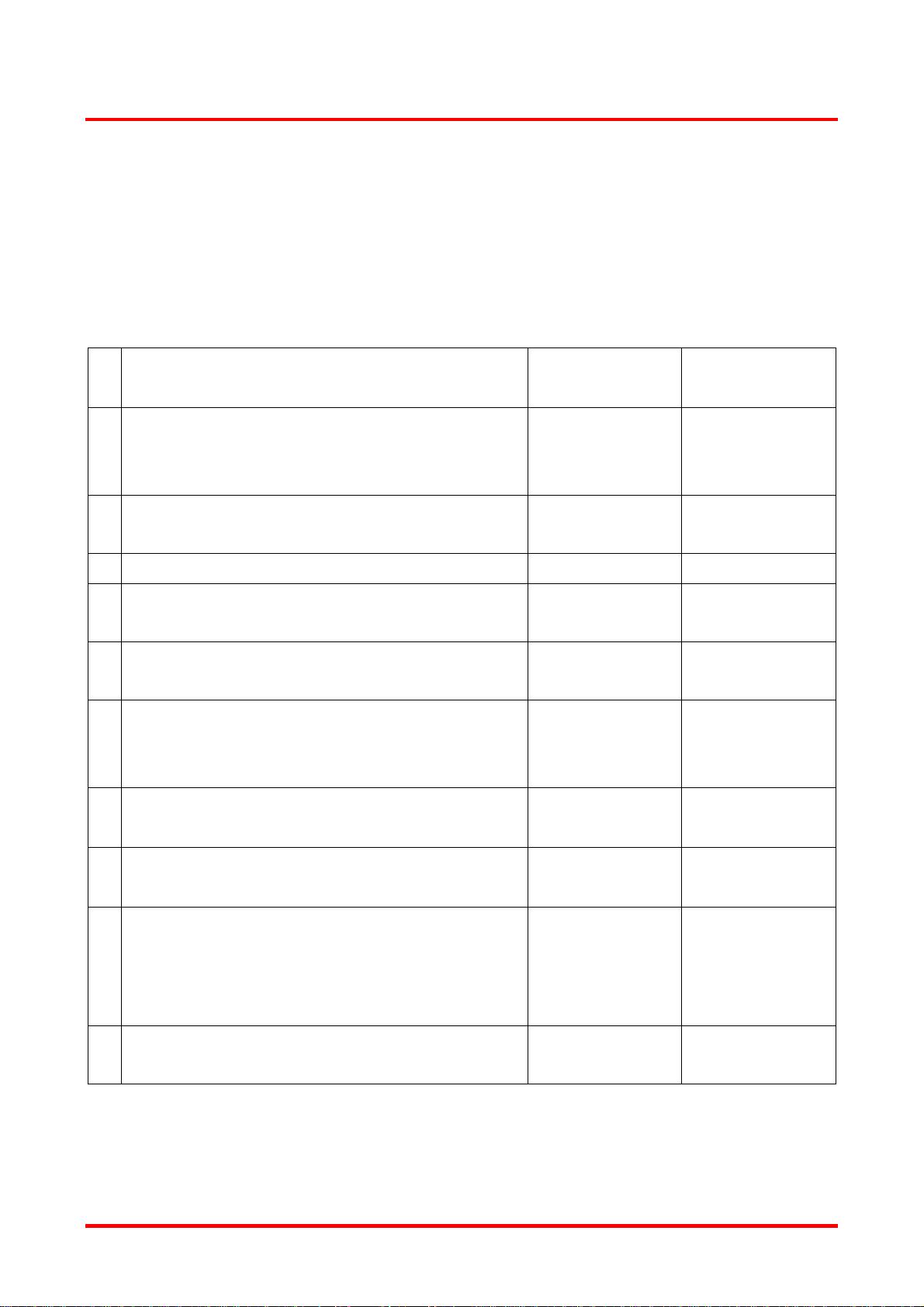
5.2 错误计数值
发送错误计数值和接收错误计数值根据一定的条件发生变化。
错误计数值的变动条件如表 2 所示。
一次数据的接收和发送可能同时满足多个条件。
错误计数器在错误标志的第一个位出现的时间点上开始计数。
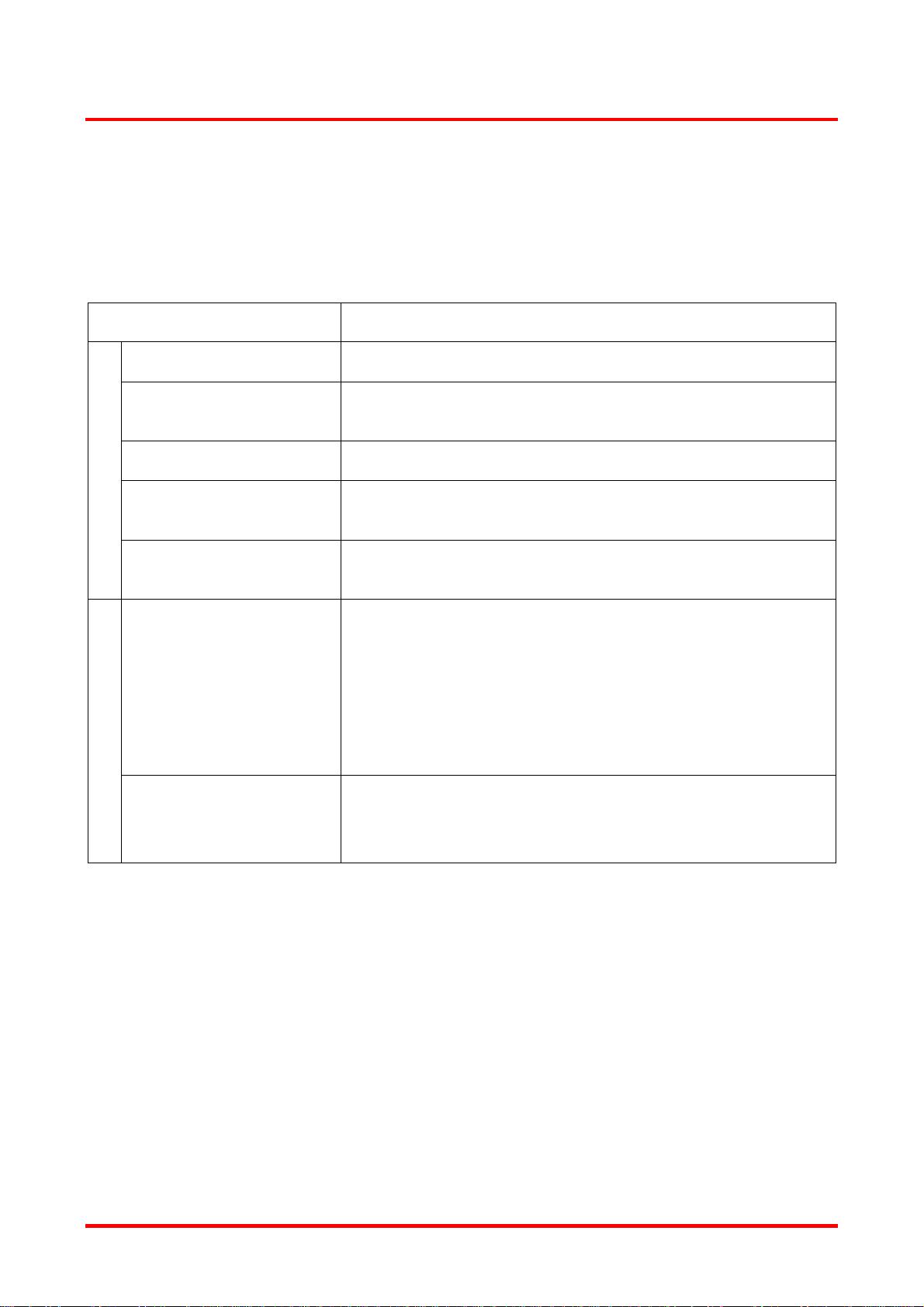
表 2. 错误计数值的变动条件
接受和发送错误计数值的变动条件 发送错误计数值
(TEC)
接收错误计数值
(REC)
1 接收单元检测出错误时。
例外:接收单元在发送错误标志或过载标志中检测出“位
错误”时,接收错误计数值不增加。
+1
2 接收单元在发送完错误标志后检测到的第一个位为显性电
平时。
+8
3 发送单元在输出错误标志时。 +8
4 发送单元在发送主动错误标志或过载标志时,检测出位错
误。
+8
5 接收单元在发送主动错误标志或过载标志时,检测出位错
误。
+8
6 各单元从主动错误标志、过载标志的最开始检测出连续 14
个位的显性位时。
之后,每检测出连续的 8 个位的显性位时。
发送时
+8
接收时
+8
7 检测出在被动错误标志后追加的连续 8 个位的显性位时。 发送时
+8
接收时
+8
8 发送单元正常发送数据结束时(返回 ACK 且到帧结束也未
检测出错误时)。
−1
TEC=0 时±0
9 接收单元正常接收数据结束时(到 CRC 未检测出错误且正
常返回 ACK 时)。
1≤REC≤127 时-1
REC=0 时±0
REC>127 时
设 REC=127
10 处于总线关闭态的单元,检测到 128 次连续 11 个位的隐
性位。
TEC=0
REC=0
剩余48页未读,继续阅读
2015-06-16 上传
2016-02-03 上传
2021-10-07 上传
2021-06-04 上传
2023-03-18 上传
2023-03-04 上传


AaronVan
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 掌握Jive for Android SDK:示例应用的使用指南
- Python中的贝叶斯建模与概率编程指南
- 自动化NBA球员统计分析与电子邮件报告工具
- 下载安卓购物经理带源代码完整项目
- 图片压缩包中的内容解密
- C++基础教程视频-数据类型与运算符详解
- 探索Java中的曼德布罗图形绘制
- VTK9.3.0 64位SDK包发布,图像处理开发利器
- 自导向运载平台的行业设计方案解读
- 自定义 Datadog 代理检查:Python 实现与应用
- 基于Python实现的商品推荐系统源码与项目说明
- PMing繁体版字体下载,设计师必备素材
- 软件工程餐厅项目存储库:Java语言实践
- 康佳LED55R6000U电视机固件升级指南
- Sublime Text状态栏插件:ShowOpenFiles功能详解
- 一站式部署thinksns社交系统,小白轻松上手
