GPS遮挡时的改良EKF定位算法
135 浏览量
更新于2024-08-30
1
收藏 405KB PDF 举报
"本文主要探讨了在GPS信号受到阻塞,导致可见卫星数量减少至4颗以下时,如何改进扩展卡尔曼滤波(EKF)算法以提高定位精度。传统EKF和迭代最小二乘(ILS)算法在这种情况下表现不佳。文章提出了一种创新方法,利用地面上垂直方向的位置变化缓慢特性来构建改进的EKF系统模型。通过对理论的深入分析确定滤波器参数,并使用实际的GPS卫星数据进行验证。实验结果显示,当至少有4颗卫星可见时,改进后的EKF算法与标准EKF算法的定位精度相当;而在只有3颗卫星可见的GPS阻塞条件下,改进的EKF算法表现出更高的定位精度。"
文章中,作者首先介绍了问题背景,即GPS信号受阻导致的定位困难,尤其是对于迭代最小二乘算法和普通EKF算法。接着,提出了改进的EKF算法,该算法的核心在于利用地面上物体在垂直方向上的位置变化较慢这一特性,构建更适应低卫星数量条件下的系统模型。
在定位解算的系统模型部分,文章详细阐述了状态模型和观测模型。测量模型描述了伪距与系统状态参量之间的关系,而状态模型则涉及系统状态参量的时间更新过程。在低卫星数量的情况下,通过增加特定的方程来考虑垂直地面方向的位置变化,从而提高了定位的准确性。
改进的EKF算法的实现过程中,文章列出了关键的数学表达式和计算步骤,包括转换矩阵和状态转移矩阵的定义,这些都是为了确保在卫星数量受限时仍能有效估计物体的位置。
实验部分,通过真实GPS卫星数据的验证,证实了改进的EKF算法在3颗卫星可见时相比于标准EKF算法的优越性,这证明了提出的算法在应对GPS信号阻塞问题时的有效性和实用性。
这篇论文提供了一个创新的解决方案,针对GPS信号阻塞问题,通过改进EKF算法来提高定位系统的性能,特别是在卫星信号弱或受干扰的环境中,具有重要的理论和实践意义。这对于依赖GPS定位的领域,如车载导航、无人机控制、移动设备定位等,都有显著的应用价值。
GPS信号阻塞情况下的信号阻塞情况下的EKF算法改进算法改进
当GPS信号发生阻塞时,可见卫星数会不足4颗,这时迭代最小二乘算法(ILS)与普通扩展卡尔曼滤波(EKF)都
不再适用。针对这一问题提出了一种改进的EKF算法。该算法利用在垂直地面方向上的位置变化缓慢这一运动
特性,建立了改进EKF算法的系统模型。通过理论分析得到了滤波器参数,最后利用真实的GPS卫星数据进行
验证。实验结果表明,在可见卫星数不少于4颗时,此改进的EKF算法定位精度与普通的EKF算法基本相同;在
GPS信号阻塞只有3颗可见卫星时,此改进的EKF算法的定位精度明显优于普通的EKF算法。
摘摘 要:要: 当
关键词:关键词: 扩展卡尔曼滤波; GPS; 信号阻塞; 定位解算
GPS卫星
为了解决上述问题,本文提出了一种改进的EKF算法。利用在垂直地面方向上的位置变化缓慢这一运动特性,建立了改进
EKF算法的系统模型,并通过理论分析得到了滤波器参数,最后利用真实的卫星数据进行验证。需要特别指出的是,由于本文
提出的改进EKF算法利用的是在垂直地面方向上的位置变化缓慢的特征,故而该算法的适用场合为车载等地面用户的定位解
算,不适合在垂直地面方向上高速运动的情形。
1 定位解算的系统模型定位解算的系统模型
卫星定位解算的系统模型包括状态模型和观测模型两部分。令向量yt、xt分别表示系统模型的测量值和系统状态参量:
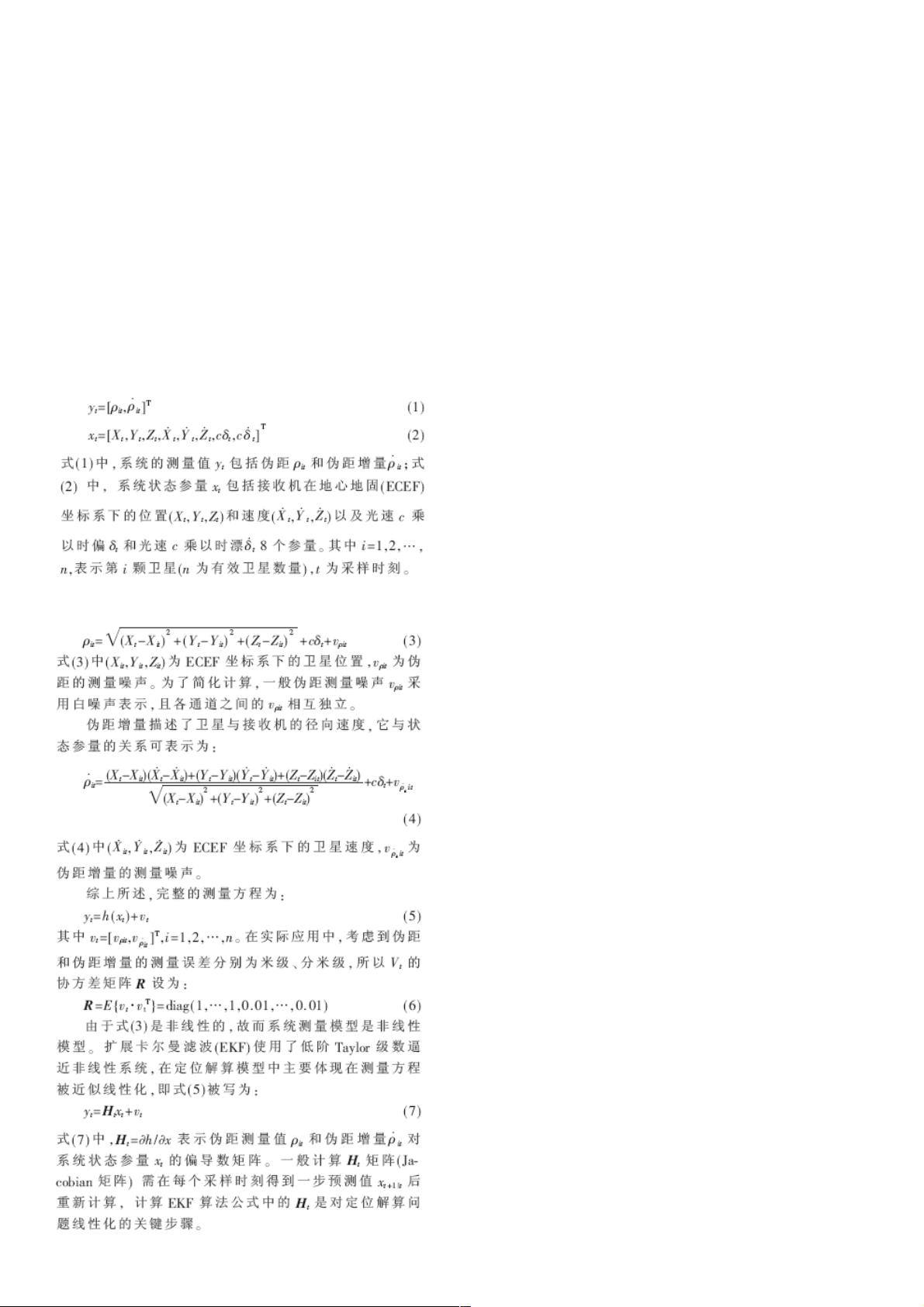
1.1 测量模型
系统的测量模型描述了系统测量值与系统状态参量之间的关系。伪距与系统状态参量的关系可表示为:
1.2状态模型状态模型
下载后可阅读完整内容,剩余5页未读,立即下载
2020-10-23 上传
点击了解资源详情
2018-05-30 上传
2022-09-15 上传
2020-10-16 上传
2022-05-06 上传
2024-10-10 上传
2022-07-14 上传

weixin_38562626
- 粉丝: 3
- 资源: 937
 我的内容管理
展开
我的内容管理
展开







最新资源
- NIST REFPROP问题反馈与解决方案存储库
- 掌握LeetCode习题的系统开源答案
- ctop:实现汉字按首字母拼音分类排序的PHP工具
- 微信小程序课程学习——投资融资类产品说明
- Matlab犯罪模拟器开发:探索《当蛮力失败》犯罪惩罚模型
- Java网上招聘系统实战项目源码及部署教程
- OneSky APIPHP5库:PHP5.1及以上版本的API集成
- 实时监控MySQL导入进度的bash脚本技巧
- 使用MATLAB开发交流电压脉冲生成控制系统
- ESP32安全OTA更新:原生API与WebSocket加密传输
- Sonic-Sharp: 基于《刺猬索尼克》的开源C#游戏引擎
- Java文章发布系统源码及部署教程
- CQUPT Python课程代码资源完整分享
- 易语言实现获取目录尺寸的Scripting.FileSystemObject对象方法
- Excel宾果卡生成器:自定义和打印多张卡片
- 使用HALCON实现图像二维码自动读取与解码
