基于STC89C52的智能扫地机设计与实现
版权申诉
184 浏览量
更新于2024-06-21
收藏 4.4MB DOCX 举报
"基于单片机的智能扫地机设计与实现"
在当今的智能化时代,智能设备已经深入到我们生活的各个领域,其中智能扫地机就是一种广泛应用的智能家居产品。这款基于单片机的智能扫地机,以其高效、便捷的特点,极大地减轻了人们的家务负担,同时推动了家庭自动化的发展。
该智能扫地机的核心控制器是STC89C52单片机,这是一款8位微控制器,因其编程简单、成本效益高、功能强大且运行效率高而受到青睐。STC89C52拥有丰富的I/O端口,可以方便地连接各种外围设备,为扫地机的智能化提供了基础。其工作原理是通过预设的程序控制扫地机的行动逻辑,包括路径规划、避障策略以及吸尘功能的执行。
在硬件设计上,扫地机主要由以下几个部分构成:
1. 单片机主控电路:这是整个系统的控制中心,STC89C52单片机接收并处理来自传感器和其他组件的信息,然后输出指令控制扫地机的行为。
2. 单片机最小系统电路:包括电源、晶振和复位电路,它们为单片机提供稳定的工作环境,确保程序的正常运行。
3. 红外光电避障电路:利用红外传感器检测前方障碍物,当探测到物体时,扫地机会及时调整方向以避免碰撞。
4. 按键启动停止电路:通过按键,用户可以轻松地启动或停止扫地机的工作,增加了操作的灵活性。
5. 电机驱动电路:驱动扫地机的行走马达和风扇,实现清扫和移动功能。
在软件层面,设计者使用了KEIL编程软件来编写和烧录单片机的控制程序。KEIL是一款强大的嵌入式开发工具,支持C语言编程,使得代码编写更直观,调试更方便。
设计过程中,电路图和PCB板的制作至关重要。通过Altium Designer软件,设计师可以完成电路原理图的设计和电路板的布局,确保电路的合理性和可靠性。这一阶段不仅需要考虑电路的功能,还要兼顾到实际制造中的可生产性以及成本因素。
在实际应用中,智能扫地机还需要具备一定的自主导航能力,比如采用随机碰撞法或更先进的路径规划算法(如SLAM算法)来确定清扫路线。此外,电池管理系统也是重要一环,保证扫地机在工作期间有充足的电力供应,并在电量低时能自行返回充电座充电。
总结来说,基于单片机的智能扫地机是一个集成了电子技术、机械工程和软件编程的综合项目。它的成功实施依赖于高效的硬件设计、精确的控制算法以及可靠的软件实现。通过不断地迭代和优化,这样的智能扫地机将为我们的生活带来更多的便利。
北京理工大学珠海学院 2020 届本科生毕业设计
4
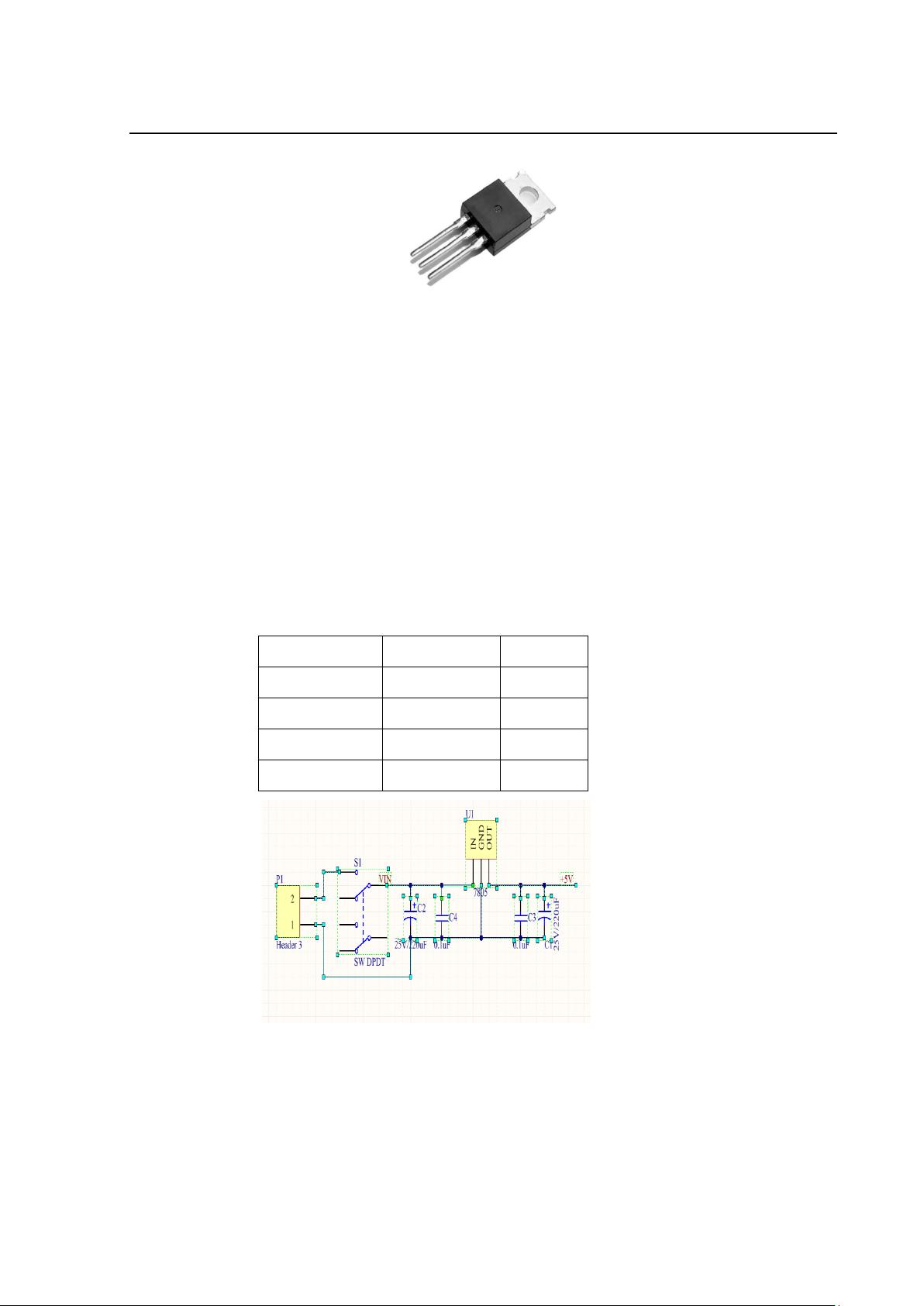
图 2.2 7805 稳压芯片
由用 6 节干电池提供 12V 的输入电源,经过 220uF/25V 电解电容,注意正负极之
分,不能接反,否则容易爆炸。该电解电容可以滤除主要的输入低频纹波,还能够缓
冲断电时间,防止瞬间电压变化,保护 7805 芯片。然后经过 0.1uF 高频电容去除大纹
波的电流能够不发热。然后经由三端稳压芯片 7805 稳压,再次经过 0.1uF 高频电容和
220uF/25V 的电解电容进行滤除杂波,输出的电压固定在 5V 左右。电解电容和瓷片电
容并联接在电路可以有效的滤除高频和低频纹波,而且有效地抑制了其他电源中的杂
波。即电源开关电解电容瓷片电容7805 稳压芯片电解电容瓷片电容输
出 5V 电压。关键词:电解电容滤除低频纹波,瓷片电容滤除高频纹波。所需原器件如
表 2.1
表 2.1 稳压电路元器件
元器件名称
型号
数量
电解电容
25V/220
2
瓷片电容
0.1uF
2
稳压芯片
L7805CV
1
电源电池
12V
1
图 2.3 稳压电源电路
2.3 总控制电路
2.3.1 STC89C52RC单片机简介
STC89C52 是一个微型 MCU 控制电子元器件,应用范围特别广泛。它持有高性能

剩余44页未读,继续阅读
2023-02-27 上传
2023-07-13 上传
2023-05-05 上传
2023-06-10 上传
2023-02-24 上传
2023-05-30 上传
2023-05-31 上传
2023-05-31 上传
2023-09-04 上传

南抖北快东卫
- 粉丝: 79
- 资源: 5587
 我的内容管理
展开
我的内容管理
展开







最新资源
- 高清艺术文字图标资源,PNG和ICO格式免费下载
- mui框架HTML5应用界面组件使用示例教程
- Vue.js开发利器:chrome-vue-devtools插件解析
- 掌握ElectronBrowserJS:打造跨平台电子应用
- 前端导师教程:构建与部署社交证明页面
- Java多线程与线程安全在断点续传中的实现
- 免Root一键卸载安卓预装应用教程
- 易语言实现高级表格滚动条完美控制技巧
- 超声波测距尺的源码实现
- 数据可视化与交互:构建易用的数据界面
- 实现Discourse外聘回复自动标记的简易插件
- 链表的头插法与尾插法实现及长度计算
- Playwright与Typescript及Mocha集成:自动化UI测试实践指南
- 128x128像素线性工具图标下载集合
- 易语言安装包程序增强版:智能导入与重复库过滤
- 利用AJAX与Spotify API在Google地图中探索世界音乐排行榜
