两相混合式步进电机的工作原理与应用
需积分: 9 97 浏览量
更新于2024-07-26
收藏 4.31MB PPT 举报
"两相混合式步进电机是步进电机的一种类型,它结合了永磁式和变磁阻步进电机的特点,广泛应用于工业控制领域。这种电机的定子通常有八磁极,分为A、B两相绕组,转子由环形磁钢和铁心构成,具有清晰的磁齿。电机工作时,通过改变定子绕组的电流方向来产生旋转磁场,驱动转子按固定角度逐步转动,从而实现精确的位置控制。由于步进电机在开环系统中即可实现定位,因此结构简单,无需位置传感器,降低了成本和复杂性。两相混合式步进电机的主要特性包括高精度、响应快、力矩大以及能够在无反馈的情况下稳定运行。"
详细内容:
两相混合式步进电机是一种广泛应用的精密定位执行机构,其结构主要包括定子和转子两部分。定子由八个带有线圈的铁心磁极组成,分为A、B两相绕组,相邻磁极的线圈串联且绕线方向相反,以产生相反的磁场。转子由两段永磁体构成,每段有多个小齿,N极和S极转子齿错开半齿距,以增强磁通变化效果。
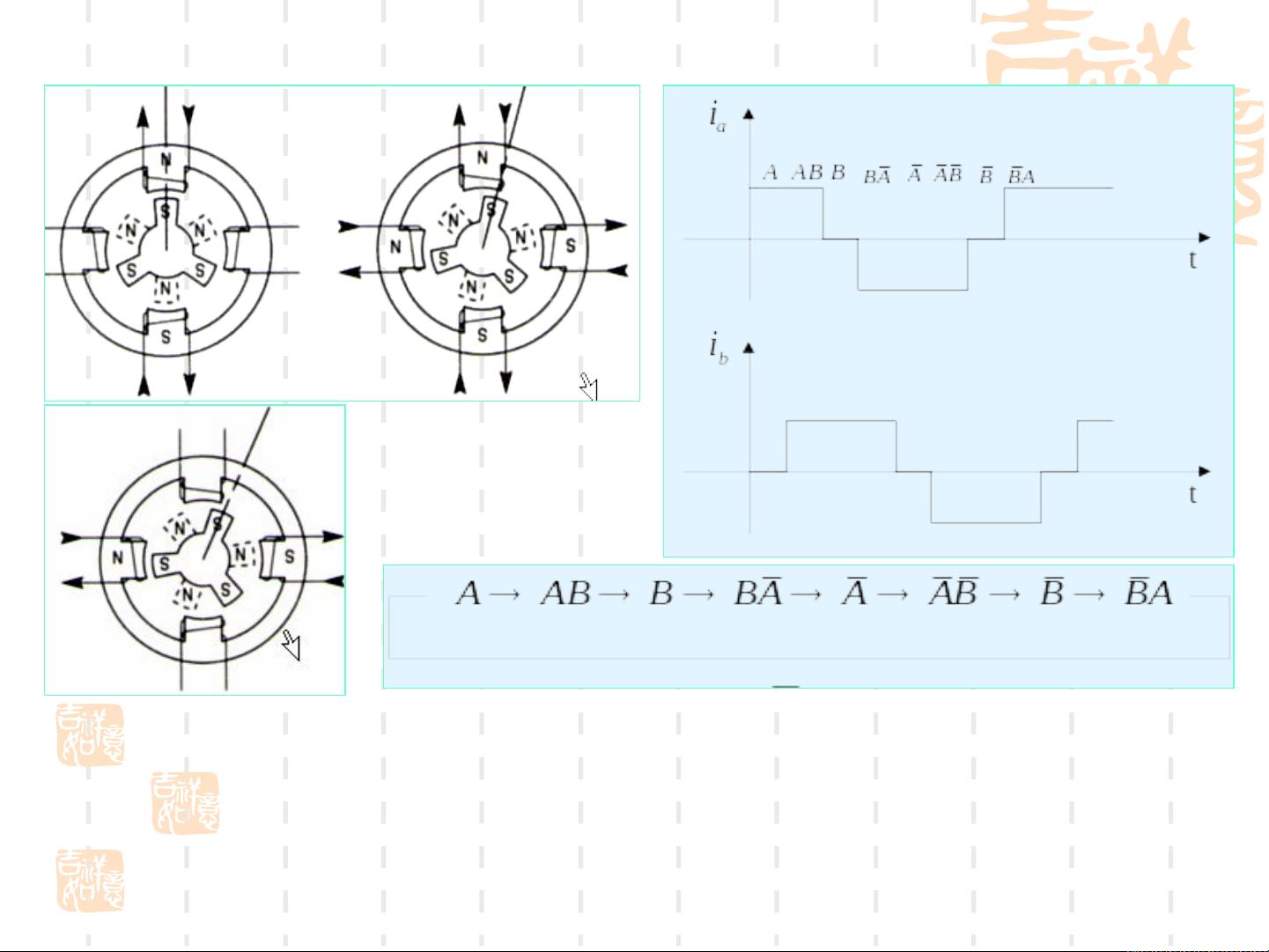
工作原理上,当定子绕组未通电时,转子处于自锁状态,因磁通路径最小化原则而保持静止。在单四拍工作模式下,首先A相通电,产生保持力矩;接着B相通电,使得定子磁场旋转90度,吸引转子移动1/4齿距(即30度);然后/A相和B相通电,再次旋转90度,使转子再前进1/4齿距,如此循环,转子每接收到一次电流脉冲就转动1/4齿距,依次完成每转12步的运动。
相较于其他类型的步进电机,两相混合式电机的优势在于其较高的效率和精度,能提供较大的启动和保持力矩,同时具备良好的低速运行性能。在步进电机驱动技术方面,通常采用脉冲宽度调制(PWM)或斩波恒流驱动方式,以控制电机的转速和力矩,并通过细分驱动提高定位精度。此外,步进电机的控制策略还包括全步、半步、微步等多种方式,以适应不同应用场景的需求。
两相混合式步进电机的主要技术指标包括步距角、力矩、空载启动频率、连续运行频率、最大力矩等。这些指标决定了电机在实际应用中的性能表现。在选择和设计步进电机控制系统时,还需要考虑电机的热特性、电气特性和机械负载条件,以确保系统的稳定性和可靠性。两相混合式步进电机因其独特的工作原理和广泛应用特性,成为了许多自动化设备和精密定位系统的首选。
10
4 )□□
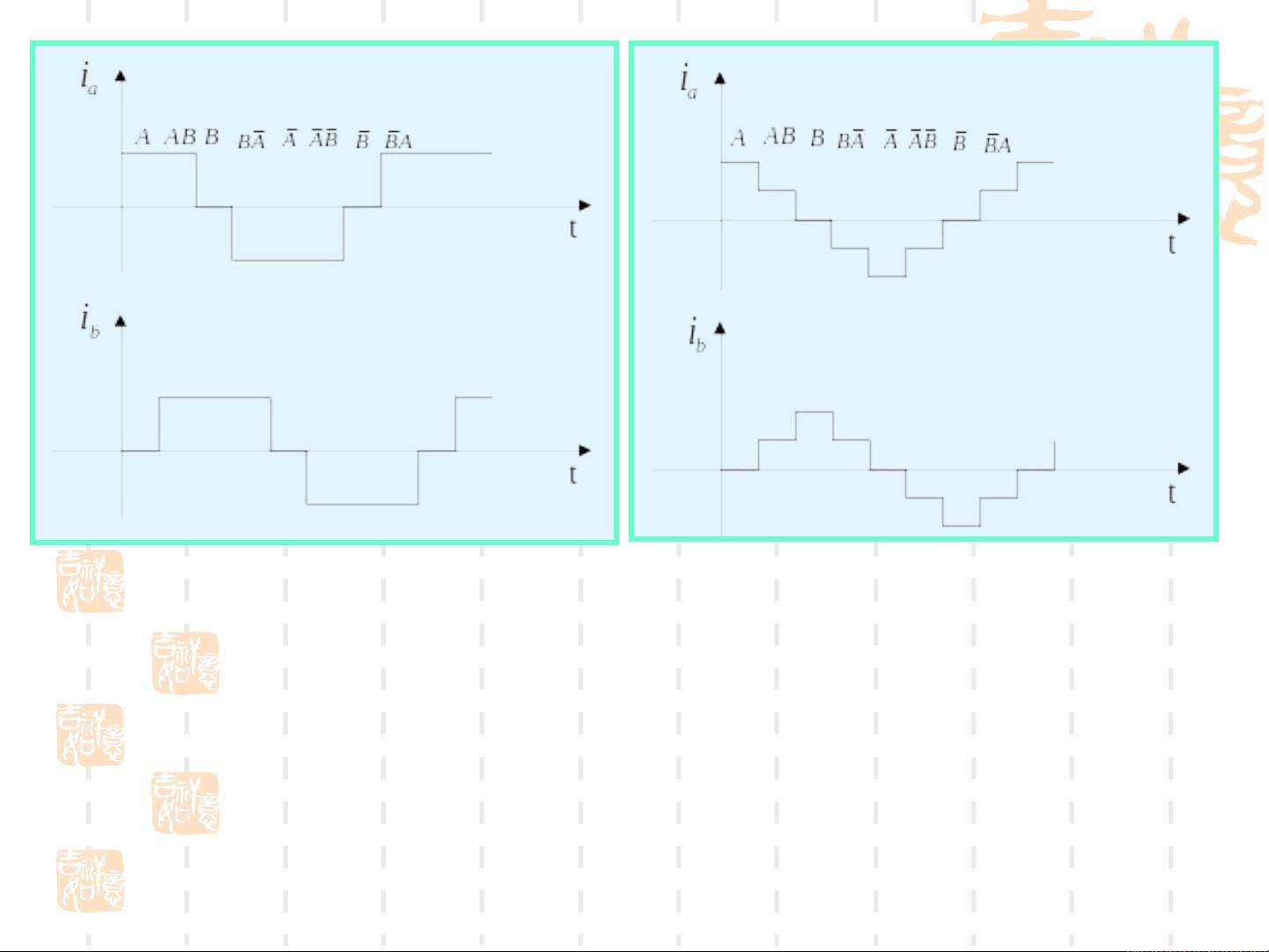
在单四拍工作方式基础上,在每两个单拍之间插入一个
双拍工作状态,就成为单、双八拍工作方式。
交替使一个线圈和两个线圈通电,每一步转子旋转 1/8
齿距即 15 度,经过这 8 拍以后,转子转过一个齿距 12
0 度。
旋转一周需 24 步。
剩余54页未读,继续阅读
2020-10-17 上传
2024-09-11 上传
2021-10-05 上传
2020-07-23 上传

MYGODNING
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular程序高效加载与展示海量Excel数据技巧
- Argos客户端开发流程及Vue配置指南
- 基于源码的PHP Webshell审查工具介绍
- Mina任务部署Rpush教程与实践指南
- 密歇根大学主题新标签页壁纸与多功能扩展
- Golang编程入门:基础代码学习教程
- Aplysia吸引子分析MATLAB代码套件解读
- 程序性竞争问题解决实践指南
- lyra: Rust语言实现的特征提取POC功能
- Chrome扩展:NBA全明星新标签壁纸
- 探索通用Lisp用户空间文件系统clufs_0.7
- dheap: Haxe实现的高效D-ary堆算法
- 利用BladeRF实现简易VNA频率响应分析工具
- 深度解析Amazon SQS在C#中的应用实践
- 正义联盟计划管理系统:udemy-heroes-demo-09
- JavaScript语法jsonpointer替代实现介绍
