开放式数控平台下的生动演示系统开发与应用
需积分: 10 30 浏览量
更新于2024-09-15
收藏 246KB PDF 举报
本文主要探讨了基于开放式数控平台的数控演示系统的研究。作者针对数控技术教学中抽象且难以理解的概念,如插补和刀补,提出了通过构建一个开放式数控平台来提升教学效果的解决方案。这个平台采用模块化程序结构,将图形仿真程序与数控应用程序有效地整合在一起,形成数控演示系统。这种系统使得复杂的数控技术概念可以通过直观的图形模拟和动态操作展示出来,极大地增强了学生对这些抽象概念的理解。
开放式数控平台的核心优势在于其灵活性和扩展性。它允许用户根据实验和实践教学需求进行二次开发,不仅限于单一的教学功能,而是提供了丰富的开发环境。硬件部分包括机械结构、步进驱动器装置、运动控制卡以及上位PC,其中IPC(工业控制计算机)作为一个核心组件,因其可靠性及丰富的软件资源,成为集成运动控制程序和演示程序的理想选择。运动控制器采用高性价比的GT-200.SV型运动控制卡,支持两轴步进电机或伺服电机,确保了精确的运动控制。
在机械部分,两台57BYGH24型步进电机被选用,它们驱动XY平台实现精确的运动控制。驱动器部分的选择也至关重要,它直接影响到系统的性能和稳定性。通过总线连接的运动控制卡与驱动器协同工作,确保了整个系统的高效运行。
这篇文章强调了开放式数控平台在数控技术教学中的重要作用,如何通过实际操作和可视化模拟,帮助学生更好地掌握理论知识,并且展示了该系统在教学实践中的应用潜力。这是一项旨在提高教育质量和效率的创新研究,对于推动数控技术的教学改革具有重要的意义。
垒!l兰兰!翌!竺
基于开放式数控平台的数控演示系统研究
Research
on
cnc
demo
system
based
on
open-architecture
cnc
platform
宁宗奇,王才峄
NING
Zong-qi,Wang
Cai-yi
(上海工程技术大学高等职业技术学院,上海200437)
摘要:构建了一个开放式数控平台。在这个平台的基础上,采用模块化程序结构,将图形仿真程序与
数控应用程序进行有机地融合,开发出数控演示系统,使数控技术教学中抽象的内容变得形
象生动。
关键词:开放式,数控平台,演示系统
中图分类号:TG659;TP23
文献标识码:B
文章编号:1009-0134(201
0)07-0050-04
Doi:1
0.3969I/J.Issn.1009-01
34.201
0.07.17
0引言
数控技术是现代制造系统中的关键技术。在
数控技术教学中,插补、刀补等概念是一些重要
的概念,但又很抽象,不便于理解和讲授。‘建立
一个基于开放式数控平台的演示系统,将图形仿
真过程和控制演示过程结合起来,就可以为抽象
的概念提供更加丰富的演示手段,在深刻的感性
认识的基础上,加深对抽象概念的理解。同时系
统的扩展性强,还可以根据实验、实践教学的需
要,为教师和学生提供二次开发平台。
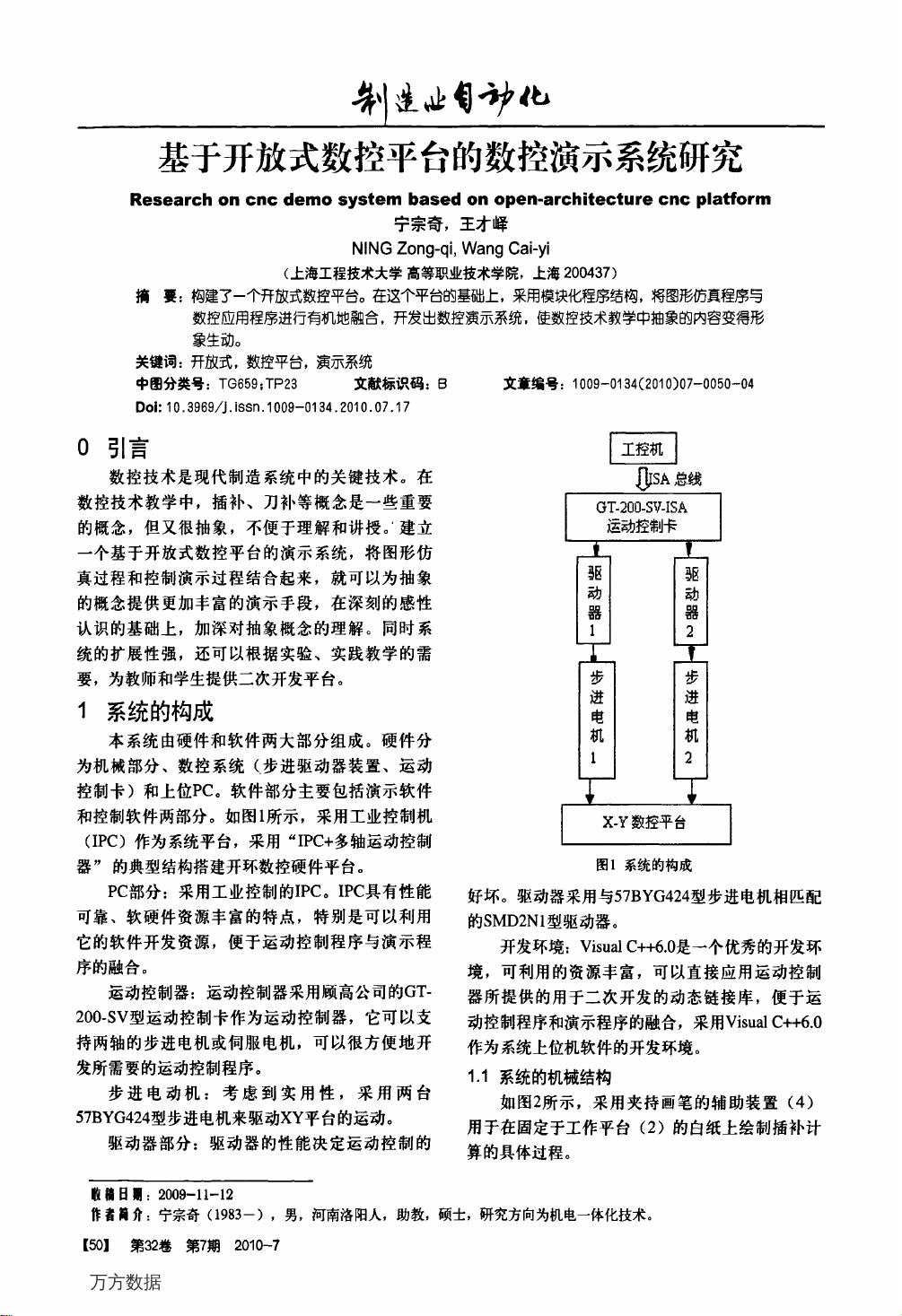
1系统的构成
本系统由硬件和软件两大部分组成。硬件分
为机械部分、数控系统(步进驱动器装置、运动
控制卡)和上位PC。软件部分主要包括演示软件
和控制软件两部分。如图l所示,采用工业控制机
(IPC)作为系统平台,采用“IPC+多轴运动控制
器”的典型结构搭建开环数控硬件平台。
PC部分:采用工业控制的IPC。IPC具有性能
可靠、软硬件资源丰富的特点,特别是可以利用
它的软件开发资源,便于运动控制程序与演示程
序的融合。
运动控制器:运动控制器采用顾高公司的GT一
200.SV型运动控制卡作为运动控制器,它可以支
持两轴的步进电机或伺服电机,可以很方便地开
发所需要的运动控制程序。
步进电动机:考虑到实用性,采用两台
57BY(弭24型步进电机来驱动XY平台的运动。
驱动器部分:驱动器的性能决定运动控制的
DsA总线
OT-200.SV-ISA
运动控制卡
』
jL
驱
驱
动
动
器
器
1
2
工 工
步
步
进 进
电 电
机 机
1
2
—1l
T
X.Y数控平台
图1系统的构成
好坏。驱动器采用与57BYG424型步进电机相匹配
的SMD2Nl型驱动器。
开发环境:Visual
C++6.0是一个优秀的开发环
境,可利用的资源丰富,可以直接应用运动控制
器所提供的用于二次开发的动态链接库,便于运
动控制程序和演示程序的融合,采用Visual
C++6.0
作为系统上位机软件的开发环境。
1.1系统的机械结构
如图2所示,采用夹持画笔的辅助装置(4)
用于在固定于工作平台(2)的白纸上绘制插补计
算的具体过程。
收稿日舅:2009-11-12
作者简介:宁宗奇(1983一),男,河南洛阳人,助教,硕士,研究方向为机电一体化技术。
【50l
第32卷第7期2010-7
万方数据
下载后可阅读完整内容,剩余3页未读,立即下载
点击了解资源详情
170 浏览量
点击了解资源详情
2021-11-12 上传
181 浏览量
200 浏览量
点击了解资源详情
点击了解资源详情
点击了解资源详情









