Rhapsody与UML开发:巡航控制系统的建模探索
"这篇报告是关于使用Rhapsody和UML进行导航控制系统开发的一个项目,目的是熟悉Rhapsody这一基于统一建模语言(UML)的开发工具。尽管原计划将开发的软件嵌入到TMS-320LF2407板上,但最终发现Rhapsody假设目标系统需要实时操作系统(RTOS),而该板并不符合这个要求。项目采用了Rapid Object-Oriented Process for Embedded Systems(ROPES)方法,该方法提倡‘循环原型’,即在分析模型不完整的情况下也能进行早期测试。为了探索Rhapsody的潜力,选择了用它来建模巡航控制系统(CC)。项目成功实现了熟悉Rhapsody的目标,开发出了功能完备的CC,并积累了详尽的工具知识。建议进一步研究改进速度保持的控制算法,以及开发图形用户界面以显示系统输出和方便插入事件。此外,推荐开发一个Rhapsody框架,使其能够适应非RTOS环境。"
本项目的核心是利用IBM Rational Rhapsody作为开发工具,通过UML(统一建模语言)进行导航控制系统的建模和设计。Rhapsody是一种强大的模型驱动开发工具,特别适用于嵌入式系统的复杂软件工程。在这个过程中,项目团队遵循了ROPES方法,这是一种面向嵌入式系统的快速面向对象的过程,其核心是迭代的“循环原型”技术,允许在分析模型未完全完成时就进行初步验证。
项目选择实现的特定系统是一个巡航控制系统(CC),旨在自动维持车辆的行驶速度。通过使用Rhapsody,项目团队成功地创建了一个完整的、功能齐全的CC模型,这不仅证明了Rhapsody作为开发工具的有效性,也积累了大量关于该工具的实际操作经验。然而,由于TMS-320LF2407板不支持Rhapsody所需的RTOS,所以将其软件嵌入硬件的目标未能实现。
项目的成果表明,Rhapsody在建模和早期测试方面具有显著优势,但对于不依赖RTOS的嵌入式平台,需要进一步的研究和开发以适应这些环境。为了提升CC的性能,报告建议对维持速度的控制算法进行优化,这可能涉及到更深入的控制理论和算法设计。同时,开发一个图形用户界面(GUI)也是必要的,它可以可视化系统输出,使用户能直观地查看系统状态,并方便地插入事件,增强交互性。
此外,报告还提出开发一个Rhapsody的扩展框架,以支持在没有RTOS的环境中使用。这可能涉及到对Rhapsody的工作流程进行调整,以适应那些不需要严格实时性的系统。这样的框架将极大地拓宽Rhapsody的应用范围,使其能在更广泛的嵌入式系统设计中发挥作用。
这个项目提供了关于如何使用Rhapsody和UML进行嵌入式系统开发的宝贵经验,同时也指出了工具和技术在实际应用中可能遇到的挑战,以及未来改进的方向。对于希望涉足这一领域的工程师和研究人员来说,这是一个深入理解Rhapsody特性和局限性,以及如何克服这些限制的实际案例。

2
An elaborate explanation of this method is given in Chapter 2.
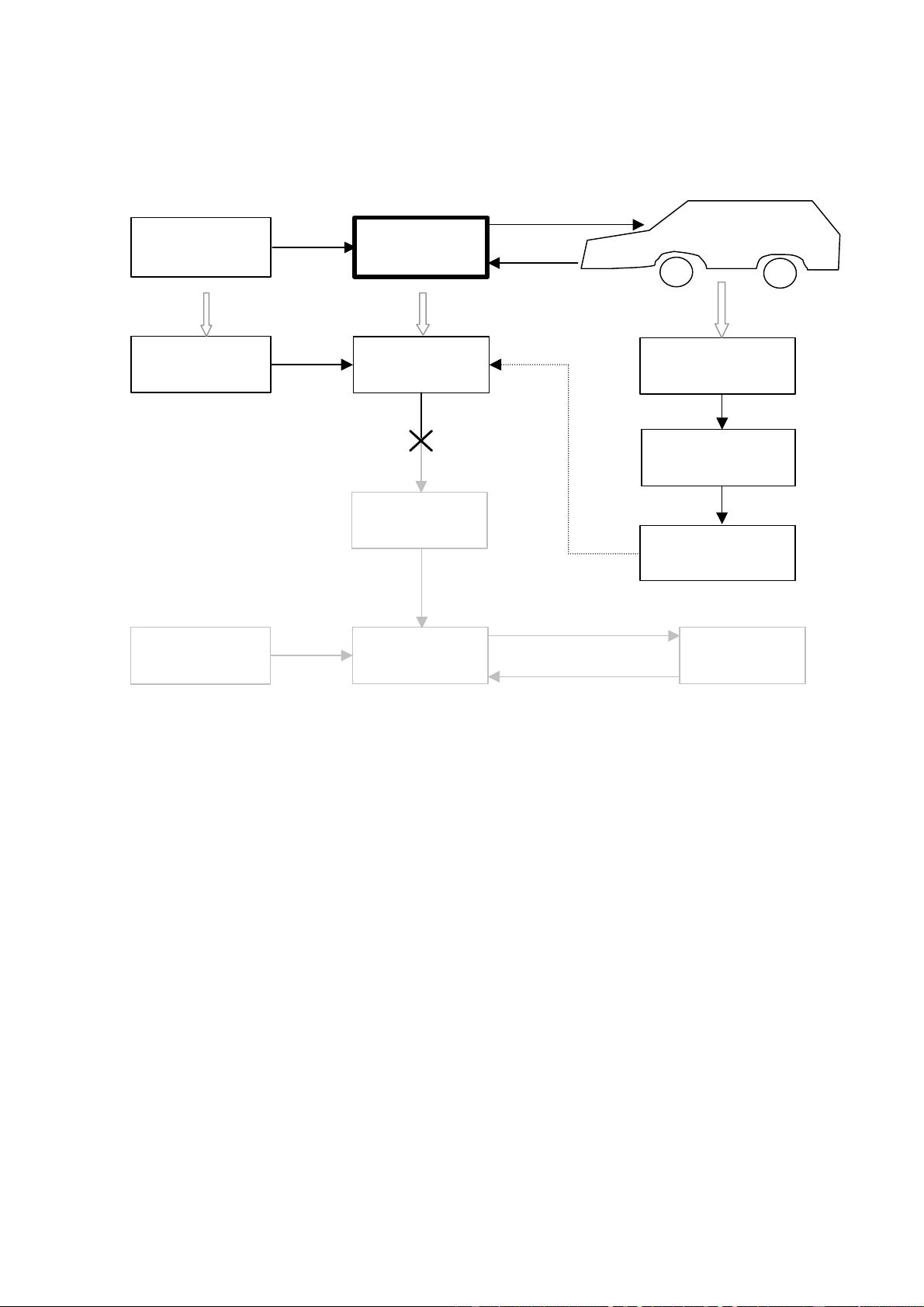
Initially, the goal of the project was embedding the software in a TMS-320LF2407 programmable
board, using a Code Composer. This initial project strategy is depicted schematically as in figure
1.3.
Figure 1.3
Scheme of the initial modeling strategy
Later, this goal has been renounced because of a mismatch between the output assumptions of
Rhapsody and the features of the TMS-board. Rhapsody assumes a Real Time Operating System
(RTOS), and the TMS-board does not qualify for that. The project has been redirected as shown
in figure 1.4.
convert C++ to C
model in
Rhapsody
TMS Code
Composer
TMS
320LF2407
User
Interface
Cruise
Control
Button Panel
Electromotor
User Command
User Command
Throttle
Throttle
Speed
Speed
plan
realization
working
order
剩余40页未读,继续阅读
140 浏览量
443 浏览量
325 浏览量
2022-09-22 上传
252 浏览量
245 浏览量
163 浏览量
112 浏览量
点击了解资源详情

double_job
- 粉丝: 1
- 资源: 10
 我的内容管理
展开
我的内容管理
展开







