自动驾駛汽车车道检测:OpenCV 实战教程
需积分: 0 6 浏览量
更新于2024-08-05
收藏 6.04MB PDF 举报
"实战认识OpenCV在自动驾驶汽车车道检测中的应用"
在自动驾驶技术中,车辆定位和路径规划是至关重要的部分,而车道检测则扮演着核心角色。本篇文章通过一个实战示例,展示了如何使用OpenCV库进行车道检测,以帮助自动驾驶汽车保持在正确的车道上。下面将详细解析这个过程。
首先,我们关注的是边缘检测,这是图像处理中的基本步骤,用于识别图像中的边界。在本例中,采用了Canny算法来执行这一任务。Canny边缘检测器是一种多级边缘检测算法,它通过高斯滤波器消除噪声,然后应用强度梯度检测和非极大值抑制来找到最显著的边缘。代码中的`cannyEdgeDetector`函数接受图像作为输入,应用Canny算法,并返回边缘检测后的图像。
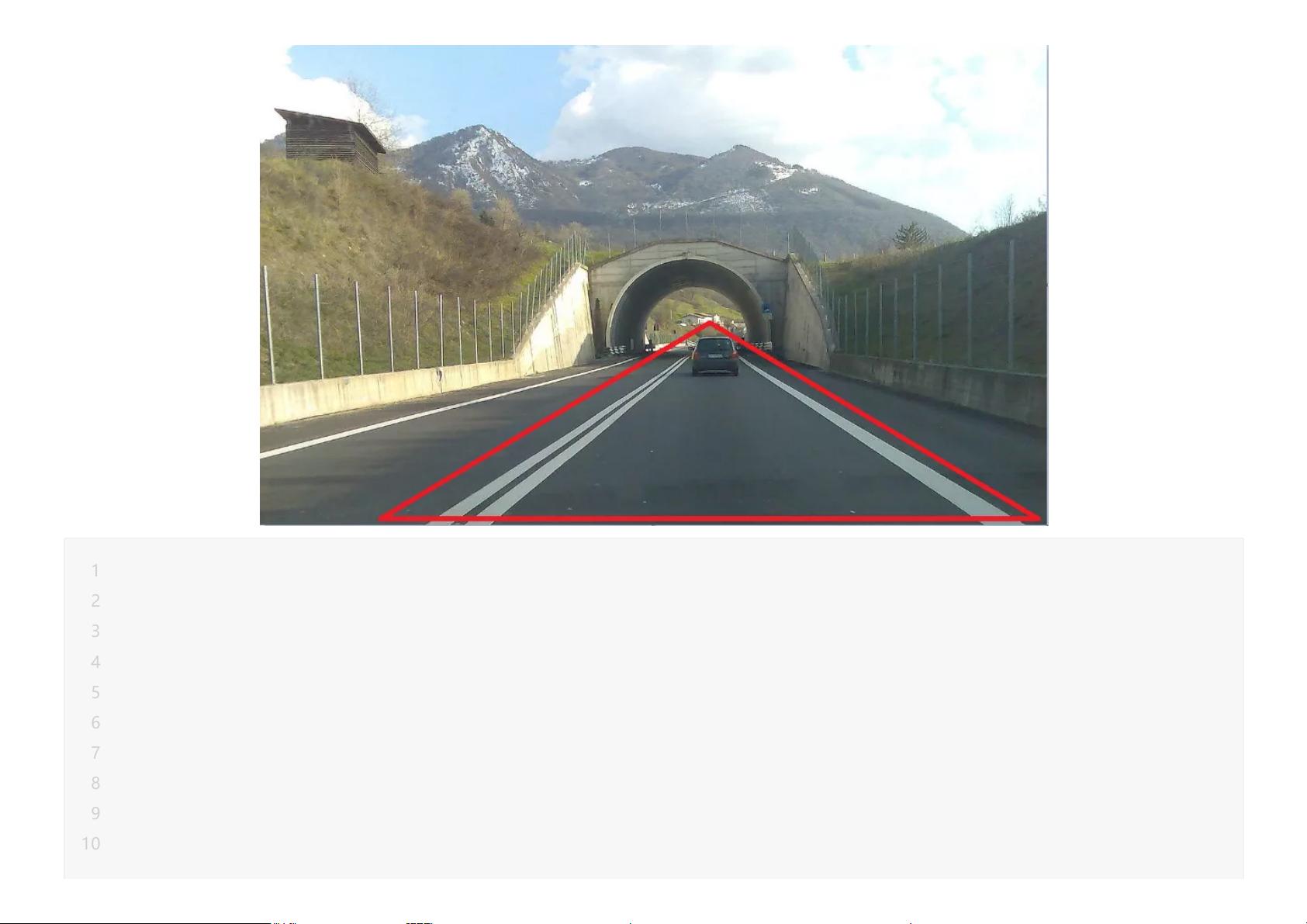
接着,定义了感兴趣区域(ROI)的概念。ROI是图像中我们特别关注的部分,对于车道检测来说,我们只关心车前100米的道路,并且只关注车道线,不包括对向车道。为了定义ROI,创建了一个三角形区域,其坐标根据摄像头在车上的实际安装位置调整。代码中的`getROI`函数实现这一功能,通过`np.array`创建三角形顶点,然后用这些点创建一个黑色的图像作为掩模。`cv2.fillPoly`函数用来填充这个三角形区域,将其设为白色,其余部分保留为黑色。然后将这个掩模应用到原图上,从而得到只包含我们需要分析部分的图像。
之后,通过对处理后的图像进一步分析,例如应用霍夫变换来检测直线,我们可以识别出车道线。霍夫变换是一种从边缘像素点找出几何形状(如直线)的数学方法。在车道检测中,这有助于从边缘图像中找到车道线的精确位置。一旦找到车道线,可以进一步计算它们的曲率,以确定汽车是否偏离车道,并作出相应的驾驶决策。
这篇文章通过实战展示了如何利用OpenCV的边缘检测和ROI选择功能,实现自动驾驶汽车的车道检测。这个过程不仅能够帮助理解OpenCV在计算机视觉任务中的应用,也为实际的自动驾驶系统设计提供了参考。通过不断优化这些算法和模型,我们可以提高自动驾驶汽车的安全性和可靠性。
2021/8/12
實戰:使⽤OpenCV 的⾃動駕駛汽⾞⾞道檢測(附代碼)
https://mp.weixin.qq.com/s/SnYl4pANBjSQo_vTU8Ew8Q
3/14
1
2
3
4
5
6
7
8
9
10
def getROI(image):
height = image.shape[0]
width = image.shape[1]
# Defining Triangular ROI: The values will change as per your camera mounts
triangle = np.array([[(100, height), (width, height), (width-500, int(height/1.9))]])
# creating black image same as that of input image
black_image = np.zeros_like(image)
# Put the Triangular shape on top of our Black image to create a mask
mask = cv2.fillPoly(black_image, triangle, 255)
# applying mask on original image
剩余13页未读,继续阅读
2023-10-10 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情

LauraKuang
- 粉丝: 22
- 资源: 334
 我的内容管理
展开
我的内容管理
展开







最新资源
- AA4MM开源软件:多建模与模拟耦合工具介绍
- Swagger实时生成器的探索与应用
- Swagger UI:Trunkit API 文档生成与交互指南
- 粉红色留言表单网页模板,简洁美观的HTML模板下载
- OWIN中间件集成BioID OAuth 2.0客户端指南
- 响应式黑色博客CSS模板及前端源码介绍
- Eclipse下使用AVR Dragon调试Arduino Uno ATmega328P项目
- UrlPerf-开源:简明性能测试器
- ConEmuPack 190623:Windows下的Linux Terminator式分屏工具
- 安卓系统工具:易语言开发的卸载预装软件工具更新
- Node.js 示例库:概念证明、测试与演示
- Wi-Fi红外发射器:NodeMCU版Alexa控制与实时反馈
- 易语言实现高效大文件字符串替换方法
- MATLAB光学仿真分析:波的干涉现象深入研究
- stdError中间件:简化服务器错误处理的工具
- Ruby环境下的Dynamiq客户端使用指南
