仿生海马机制下的兴趣导向SLAM算法研究
版权申诉
DOCX格式 | 1.23MB |
更新于2024-06-27
| 2 浏览量 | 举报
本文档探讨了一种创新的SLAM算法,即基于兴趣倾向机制的仿生SLAM方法。SLAM技术,作为移动机器人自主导航的核心问题,旨在解决机器人在未知环境中实时定位和构建地图的问题。然而,传统SLAM算法面临计算复杂性和效率低下的挑战,这使得它难以比拟动物在导航方面的高效性能。
论文引用了神经科学研究,着重指出海马体在动物导航中的关键角色。海马体内的位置细胞、网格细胞以及边界细胞等不同类型细胞共同协作,构建了一种被称为“空间认知地图”的结构,这种地图能够表达环境的拓扑关系,并通过细胞的放电模式整合速度和方向信息。例如,Hafting和Doeller的研究揭示了网格细胞的六边形放电模式,它们在特定空间位置的激活有助于定位。
然而,这些模型并非完全基于生理学基础,比如Hardcastle和Jayakumar的研究强调了网格细胞在不同几何环境中的适应性,以及引入边界信息以提高定位精度。这些发现暗示了在复杂环境中的定位依赖于多维度的信息处理,如位置感知和视觉线索的融合。
为了提升SLAM算法的智能化,研究者开始借鉴动物大脑的特点,尤其是灵长类动物的大脑机制,如模糊自适应共振理论模型,用于处理视觉信息并建立视觉记忆。这种模型有助于实现环境的认知表征,但尚未充分考虑到神经元网络间的复杂交互。
基于兴趣倾向机制的仿生SLAM算法试图通过模仿动物大脑的海马体功能,特别是网格细胞和视觉信息处理机制,来改进传统的SLAM方法。该算法不仅关注定位精度,还力求在处理环境动态变化和多模态信息融合方面达到更高的智能化水平,以应对现实生活中的导航挑战。未来的研究可能需要进一步探索神经科学的更多细节,以便更精确地模拟和优化移动机器人的导航行为。
其中,$ \mathop \eta \nolimits_F $和$ \mathop \eta \nolimits_L $本文取值 0.9,分别是前
向学习率和横向学习率。通过在环境中的探索与学习,更新后的突触权重呈六边形周期分
布。得到稳定的网格细胞放电场。为了使突触权重产生周期性的空间分布,对权重更新进
行非线性限制,分别设置权重的上边界和下边界,当所有突触的任一权重超出上边界或下
边界之间的范围时,通过竞争对所有突触的权重等比例缩放,使得所有的突触权重在上边
界和下边界之间。
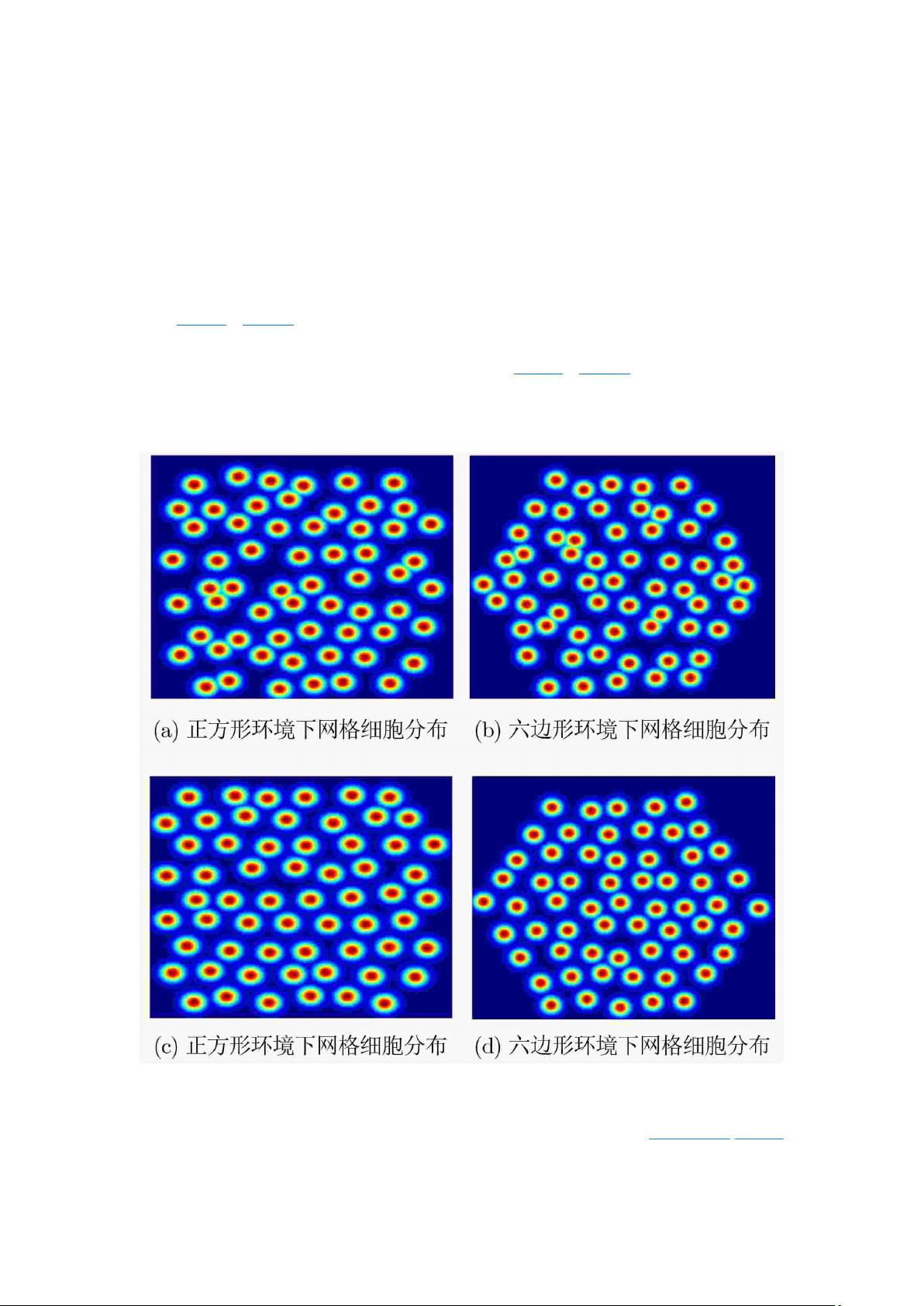
图 2(a)、图 2(b)是分别在正方形和六边形环境中探索 600s 后生成的网格细胞分布
图。因为探索时间过短,网格细胞分布规律较混乱。图 2(c)、图 2(d)是分别在正方形和六
边形环境中探索 1000 s 之后生成的网格细胞分布图。探索时间充足,对环境场景更加熟
悉,网格细胞分布均匀,能够较好地表征环境位置信息。
图 2 网格细胞分布图
下载: 全尺寸图片 幻灯片
2.2 位置细胞模型
剩余15页未读,继续阅读
相关推荐



罗伯特之技术屋
- 粉丝: 4513
- 资源: 1万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- TWinSoftSetup_11.00.1347编程软件.zip
- statisticalModel:这是为了存储统计模型
- VR-Viz:基于A框架的React组件,用于VR中的数据可视化
- 基于HTML实现的宽屏大气咖啡商店响应式网站模板5293(css+html+js+图样)
- 技嘉B460M小雕Elite+10400.zip
- bulid_new.rar
- passwordGenerator
- USB_PPM_Joystick:Arduino适配器,用于RC远程控制PPM信号到USB HID游戏杆
- 正泰NIOG1Y系列油田抽油机节能变频柜.rar
- code码
- Xshell连接工具 XshellXftpPortable.zip
- The-Brooding-Fighting-Forces
- Archity-开源
- 罗克韦尔自动化半导体与电子行业FMCS系统解决方案.zip
- 家纺用品网上销售管理系统-毕业设计
- uri-judge:C ++中的URI判断问题(cpp)
