MIL-Transformer:弱监督点云分割新模型与性能研究
159 浏览量
更新于2024-06-20
收藏 1.27MB PDF 举报
"本文介绍了基于多实例学习(MIL)的弱监督点云分割模型,结合Transformer架构来挖掘额外的监督信号。模型利用成对的云级监督,通过正包和负包的构建来区分同类和异类点云。同时,文章提出了自适应全局加权池(AdaGWP)来增强模型的鲁棒性,点二次采样和特征等方差正则化进一步提升了模型性能。该方法适用于各种类型的弱监督信号,如稀疏注释点和云级标签。实验证明,在S3DIS和ScanNet基准测试中,该方法达到了最先进的性能。"
在点云分割领域,准确的点级注释通常需要大量的人工努力,这成为了一个主要的挑战。为了解决这一问题,研究者们转向了弱监督学习,利用部分标注、子云级或场景级的注释来训练模型。本文提出的新方法是基于多实例学习(MIL)的Transformer模型,它能够利用点云之间的信息,而不仅仅是单个点云内部的信息。
Transformer模型在自然语言处理领域取得了显著的成功,而在这里,它被扩展到处理点云数据,特别是成对的点云。通过将点云配对,模型可以学习到不同类别点云之间的差异,形成正包(同类点云)和负包(异类点云),从而在弱监督环境下提取更多的监督信息。
为提高模型的鲁棒性和分割精度,作者引入了自适应全局加权池(AdaGWP)。这个模块替代了传统的最大池和平均池,通过学习到的权重对类激活图中的logits进行重新缩放,减少了噪声的影响,有助于在弱监督条件下发现更完整的前景点。
此外,点二次采样和特征等方差正则化是本文的另一个创新点。点二次采样可以减少计算复杂性,同时保持关键信息;特征等方差正则化则确保原始点云和采样点云之间的特征一致性,有助于模型的稳定训练。
该方法的端到端可训练性以及对多种弱监督信号的适应性使其具有广泛的应用潜力。在S3DIS和ScanNet这两个标准的点云分割基准测试中,提出的模型表现出了最先进的性能,证明了其有效性和实用性。源代码已公开,可供其他研究者和开发者参考和使用。
1
11832
n=1
m=1
m=1
密
耳
凸轮
[地板、书柜、
桌子、门、椅子]
采样
骨干
MIL衍生
Transformer
变压
器
企
业
简介
类感知层
AdaGWP
推理
骨干
MIL衍生
埃斯
科松
Max
企
业
简介
共享权重
Transforme
r
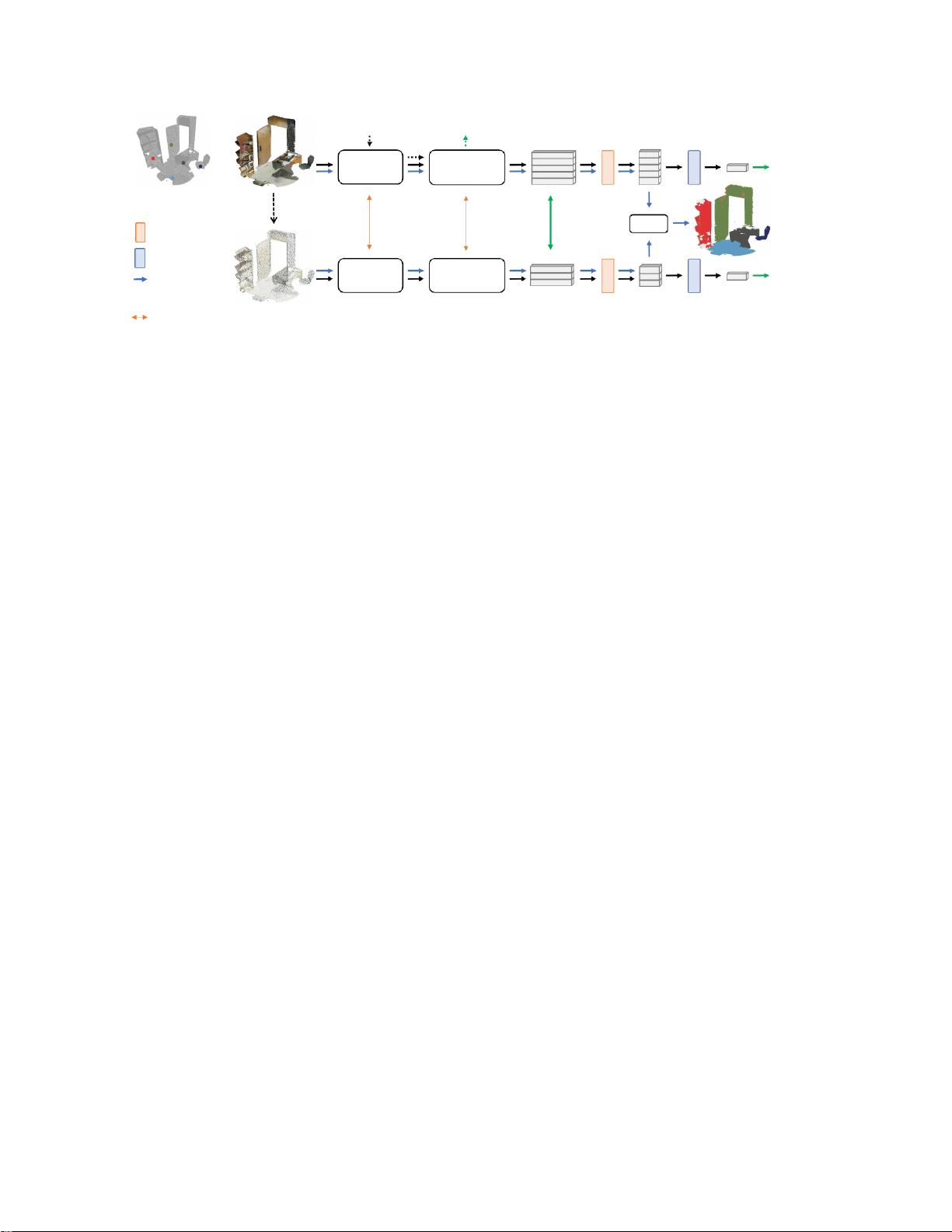
图2:我们的弱监督点云分割方法概述 我们的方法集成了三个
组件:
MIL
派生的
Transformer
,自适应全局加权池
(
AdaGWP
),跨尺度特征一致性。整个网络通过三
个
损失函数进行优化,L
cls
,L
mil
,和L
con
.
黑色箭头表示
训练路径,蓝色箭头表示推理路径详情见正文
与 上 述 方 法 不 同 的 是 , 本 文 的 方 法 扩 展 了
transformers,用于探索弱监督学习的云间语义。我们
还提出了一种可学习的池技术,用于特定于类的信息
聚合,并实现尺度间特征等方差,以达到最先进的性
能。
联合分割和跨图像模式挖掘。共同关注模块[13,32,
43]旨在发现多个图像之间的共现区域。它已用于对象
共分割[10,13,14,24,45]。例如,Hsuet al. [13]设
计一个共同注意力生成器来考虑图像之间的特征差
异,并产生共同注意力。
3.
该方法
本节介绍所提出的方法。我们首先给出了一个概述
的方法,并详细说明拟议的军用衍生Transformer。然
后,我们描述了自适应全局加权池和跨尺度特征等价
性。最后给出了具体的实现细节。
3.1.
概述
我们给出了一个弱注释的
N
个点云的集合
,这些
点云具有云级别的标签或稀疏标记的点,
即
,
D
=
{
Pn
,
yn
}
N
,其中
Pn
表示第
n
个点云
使用对比学习的分割图。Sun等人[32]通过计算一对图
像的亲和矩阵,利用对比共同注意力来捕获跨图像语
义在多幅图像的公共区域挖掘中,通常需要提出目标
建议或显著图生成方法,但它们不适用于点云。我们
的方法通过探索transformers中的交叉注意机制来解决
对 象 建 议 和 显 着 图 的 不 可 用 性 。 我 们 推 广 了
Transformer [3,34,35]及其编码器-解码器架构,以
识别云间共现点,并通过多实例学习在弱监督下导
出。
全局和加权池。 池化被广泛用于聚集全局信息和处理
弱监督学习中的不确定性。一些高级的混合冰毒-
y
n
是它的标签。 不失一般性,我们假设
每 个 云 有
M
个
点 ,
即
,
Pn
=
{
pnm
}
M
, 其 中 每 个 点
pnm
∈
R3
用其三维坐标表示。如果给出云级别标签,
则
y
n
∈ {0
,
1
}
C
是
C
维二元向量,指示哪些类别是
存在于云
Pn
中,其中C是对象类别的数量。如果提供稀
疏标记点,y
n
记录云P
n
的标记点的类别。利用弱标记
数据集D,我们的目标是导出一个分割模型,该模型
将测试云的每个点分类到C类或背景中的一个。
图2说明了我们的方法。在训练中,我们考虑点云
P
及其标签y。骨干网络,如3D U-Net [6],用于提取每
点嵌入。然后将嵌入馈送到MIL派生的Transformer的
编码器中
ODS集成了通道和空间信息[8],或者
特征
X
={x
m
}
M
其中
,
M
是
包括空间注意力[16]。Kolesnikov等人[20]前
在池化之前定义每个类的衰减权重与这些池化方法相
比,所提出的AdaGWP学习每个类的权重,其与CAM
中的通道相关联以抑制不太相关的点。该方法将MIL
提出的Transformer和AdaGWP相结合,同时实现了点
识别和类抑制,这对于弱监督点分割是必不可少的。
点 采用了军用Transformer
另一个云
P
′
。如图
1
所示,点云
P
和
P
′
分别用作参考
和锚点对于锚点
P
′
中存在的每个类别
c
,如果类别
c
也存在于
P
中,则
Transformer
输出正包,或者
一个消极的袋子,否则。
MIL
(多实例学习)损失
L
mil
作用于 所产 生的正包和 负包, 并且 用于 训 练
Transformer
和前面的
骨干网络。
剩余14页未读,继续阅读
164 浏览量
958 浏览量
102 浏览量
126 浏览量
164 浏览量
124 浏览量
点击了解资源详情

cpongm
- 粉丝: 5
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







